技术特征:
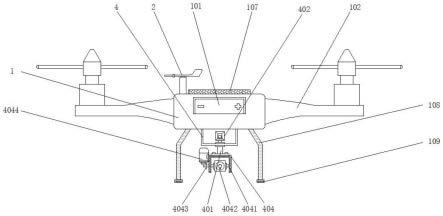
1.一种基于子母航天器的在轨建造系统,其特征在于,所述系统包括一个工厂母舰航天器和若干个空间机器人子航天器;在轨建造系统入轨前,子航天器以功能模块为单位装载在母舰航天器内部,与母舰航天器一起由运载火箭发射入轨;入轨后,工厂母舰机械臂按需将功能模块进行装配,组成具体执行各种任务的空间机器人子航天器;在轨建造过程中,工厂母舰接收地面任务指令,对任务进行分工与规划,将分解后的任务下发至各个空间机器人开展工作;任务完成后,子航天器飞回母舰,由母舰进行拆解与收纳,并一起转移至下一任务地点。2.根据权利要求1所述的系统,其特征在于,所述工厂母舰航天器的分系统载荷用于装配机械臂和子航天器的各类模块。3.根据权利要求1所述的系统,其特征在于,所述工厂母舰航天器发射时帆板和天线处于收拢状态,可展开高增益天线负责母舰对地通信,广角天线负责对空间机器人通信;母舰航天器入轨后高增益天线展开,帆板释放,露出货物舱,所述货物舱用于装载储存空间机器人的各功能模块;在货物舱内部装有母舰机械臂,用于空间机器人的装配与拆解;货物舱下方为仪器舱,内部装有母舰的各分系统单机。4.根据权利要求3所述的系统,其特征在于,所述空间机器人子航天器用于执行零部件制造、搬运和组装多种空间建造任务;所述空间机器人采用模块化设计,将空间机器人划分为中心体、末端执行器、机械臂三大模块,模块间可以自由连接,即插即用。5.根据权利要求4所述的系统,其特征在于,所述中心体模块内安装有姿控、计算机、电源和测控各分系统单机;所述中心体模块通过母舰收纳状态下母舰对其无线充电实现能源供给。6.根据权利要求5所述的系统,其特征在于,所述机械臂模块为7自由度机械臂,可直接对接在中心体模块上,机械臂末端安装不同的末端执行器模块实现不同的子航天器功能。7.根据权利要求6所述的系统,其特征在于,子航天器入轨时以功能模块为单位,存放在母舰航天器的货物舱内,入轨后由母舰机械臂按需组装而成。8.根据权利要求1所述的系统,其特征在于,所述子母航天器的在轨建造系统具备单体工作模式、子航天器组装、多体协同工作、拆解回收和自维护五种工作模式,具体为:(1)单体工作模式当子母航天器发射入轨后或在不同建造任务间转运时,在轨建造系统处于转运阶段,子母航天器采用单体工作模式;在单体工作模式下,母舰单体工作,子航天器收纳在母舰的货物舱内,此时,母舰的折叠式天线和可展开太阳能帆板均已展开,分别提供远距离对地通信和电源补给能力,母舰依靠自身携带的推力器进行轨道转移,前往预定工作位置,母舰内安装的母舰机械臂处于收拢状态,子航天器以功能模块为单位固定在母舰航天器的货物舱内部;(2)子航天器组装模式当子母航天器变轨结束抵达建造位置后,在轨建造系统处于准备阶段,子母航天器采用子航天器组装模式,在子航天器组装模式下,母舰根据具体在轨建造任务的需求,确定子航天器的功能、类型和数量,利用母舰机械臂夹取子航天器各功能模块进行拼接组装,得到所需的空间机器人,完成在轨建造准备工作;(3)多体协同工作模式
当建造所需的子航天器全部组装完成后,在轨建造系统即可进入建造阶段,开展在轨建造任务,子母航天器采用多体协同工作模式,在此模式下,母舰规划各个空间机器人子航天器的任务,通过大波束角天线与空间机器人通信,子航天器根据母舰的指令协同开展工作,完成零部件的在轨制造、搬运、组装与拆解回收任务,形成任务闭环,高效实现大型航天器在轨建造;(4)拆解回收模式当建造任务完成后,在轨建造系统进入回收阶段,将空间机器人回收至母舰,子母航天器采用拆解回收模式,此时,各个空间机器人回到母舰,母舰机械臂进行空间机器人拆解和模块的回收固定,子母航天器转换为母舰单体工作,子航天器模块收纳的形式,母舰变轨前往下一任务地点,开始新一轮任务流程;(5)自维护模式当子母航天器出现故障时,子母航天器即进入自维护模式,如果故障出现在子航天器上,故障子航天器停止工作并返回母舰航天器,由母舰机械臂更换故障模块,更换完成后子航天器继续参与建造任务,如果故障出现在母舰航天器上,则由子航天器进行检查与维修;在自维护模式下,除参与维护的子航天器外,其他空间机器人子航天器继续进行建造任务,整个过程由母舰航天器动态调控,并向子航天器发送相应指令。
技术总结
本发明提出一种基于子母航天器的在轨建造系统。所述系统包括一个母舰航天器和若干个空间机器人子航天器。本发明所述在轨建造系统通过子母航天器协同工作,能够胜任多样化的建造任务,包括在轨制造、在轨装配、在轨搬运、在轨维护等。能够提高大规模空间设施建造效率。并具备后期在轨升级拓展的能力。并且在轨可自重构、可维修,而且能够携带大量原材料,原料可补充。所述系统能够自动化自主地完成大规模建造任务,精简建造机器人设计,使空间机器人工作空间最大化。作空间最大化。作空间最大化。
技术研发人员:岳程斐 曹喜滨 王宏旭 郭金生 陈雪芹
受保护的技术使用者:哈尔滨工业大学(深圳)
技术研发日:2022.08.22
技术公布日:2022/11/18
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。