1.本发明涉及医疗器件技术领域,尤其涉及一种穿刺导管、穿刺系统及房间隔穿刺方法。
背景技术:
2.房间隔穿刺术是一种在影像设备的引导下进行的微创手术,进行普通房颤手术时均需要在左心房内进行,大部分术者都会选择从右心房的卵圆窝穿刺后将手术器械送入左心房完成手术,也就是通过房间隔穿刺后进入左心房,以建立连通左心和右心的通道,因为正常情况下经皮途径导管不能顺行直接到达左心房,虽然可以逆行通过主动脉瓣和二尖瓣的两个转弯进入左心房,但是导管操作上非常麻烦,穿刺房间隔可使导管经右心房到左心房进行左心系统检查和治疗简化操作。
3.在临床上术者进行房间隔穿刺术的过程中,由于需要术者手工操控穿刺针进行手术,对穿刺针头端的穿刺深度和穿刺力度的控制通常是凭借术者自身的经验和手感进行判断的,容易造成穿刺深度过深或者穿刺深度不够的情况,穿刺深度过深有可能会直接插入甚至扎破心房壁导致心脏穿孔。
4.手工操作导管不能准确和精准地判断穿刺针的方向和心脏内的位置,不能确定穿刺的时候穿刺针是否位于卵圆窝,穿刺针过于指向前方则可能穿刺主动脉,穿刺过于偏后则可导致右房游离壁穿孔,心脏穿孔和心脏压塞是房间隔穿刺手术最严重并发症,在安全性方面仍然存在隐患。
5.另外,整个手术过程中从鞘管经过扩张管和指引导丝指引送入心腔、指引导丝撤出、穿刺针送入鞘管、确定穿刺部位、穿刺针穿刺房间隔、扩张管和鞘管穿刺以及撤出穿刺针和扩张管等步骤,步骤繁琐,部分过程需要同时操控多个器械,手术难度高且工作量大。
6.上述人工操作技术存在以下缺点:
7.1、手工操持穿刺针术者很难精准控制穿刺针的移动,容易产生心脏穿孔等严重并发症。2、手工操持的稳定性差,术者穿刺的过程中可能离卵圆窝过前或过后,导致主动脉穿孔或右房游离壁穿孔,存在严重的安全隐患。3、整个房间隔穿刺手术步骤繁琐,需要同时操控多种器械,手工操作难度高且工作量大。4、由于房间隔穿刺术需要在影像设备的指引下操作,术者需要在手术床旁暴露在射线下进行手术操作,影响术者的身体健康。
技术实现要素:
8.本发明要解决的技术问题是如何提高房间隔穿刺术的安全性和可靠性,本发明提出一种穿刺导管、穿刺系统及房间隔穿刺方法。
9.根据本发明实施例的穿刺导管,包括:
10.扩张管,所述扩张管具有内部通道;
11.穿刺针,所述穿刺针位于所述内部通道内;
12.手柄,所述扩张管和所述穿刺针均与所述手柄连接;
13.第一控制组件,设于所述手柄,用于控制所述穿刺针轴向移动,以伸出和缩入所述扩张管;
14.第二控制组件,设于所述手柄,用于控制所述扩张管和所述穿刺针同步转动的。
15.根据本发明实施例的穿刺导管,本发明通过将穿刺针设置于扩张管内,利用同一个手柄控制穿刺针和扩张管,使整个手术简化,提高穿刺手术效率,而且,可以精准控制穿刺针穿刺房间隔,使整个穿刺过程更稳定、安全。
16.根据本发明的一些实施例,所述第一控制组件包括:
17.传动筒,与所述穿刺针和所述手柄连接;
18.第一传动齿轮,与所述传动筒螺纹连接,所述第一传动齿轮相对于所述手柄可转动,当所述第一传动齿轮转动时,驱动所述传动筒带动所述穿刺针轴向移动;
19.当所述手柄转动时,带动所述传动筒和所述穿刺针同步转动。
20.在本发明的一些实施例中,所述第二控制组件包括:
21.第二传动齿轮,与所述扩张管和所述传动筒均固定连接,当所述第二传动齿轮转动时,带动所述扩张管和穿刺针以及所述手柄同步转动。
22.根据本发明的一些实施例,所述传动筒设有限位槽,所述第二传动齿轮设有与所述限位槽相适配的限位块,以使所述第二传动齿轮转动时带动所述传动筒同步转动。
23.在本发明的一些实施例中,所述穿刺导管还包括:引导丝,所述穿刺针具有供所述引导丝穿过的引导通道。
24.根据本发明的一些实施例,所述引导通道还用于注射预设物质,手柄设有打开和关闭所述引导通道的开关。
25.在本发明的一些实施例中,所述扩张管的端部间隔设有多个电极。
26.根据本发明实施例的穿刺系统,包括:
27.穿刺导管,所述穿刺导管为上述所述的穿刺导管;
28.导管支撑器,所述导管支撑器设有与所述穿刺导管的第一传动齿轮配合的第三传动齿轮,和与所述穿刺导管的第二传动齿轮配合的第四传动齿轮;
29.所述第三传动齿轮和所述第四传动齿轮分别连接于机械臂的第一输出轴和第二输出轴。
30.根据本发明实施例的穿刺系统,可以通过机器人机械臂精准控制穿刺针穿刺,使整个穿刺过程更稳定、安全、精确、可靠。
31.根据本发明的一些实施例,所述穿刺系统还包括:
32.控制平台,所述控制平台设于与所述穿刺导管隔离的操作室,所述控制平台与所述机械臂通信连接,所述控制平台接收控制指令控制所述机械臂运动。
33.根据本发明实施例的房间穿刺方法,所述穿刺方法采用如上述所述的穿刺系统进行房间穿刺,所述方法包括:
34.s100,通过所述控制平台操控所述机械臂将所述穿刺导管的末端送至预设位置;
35.s200,通过所述控制平台操控所述机械臂来旋转第一传动齿轮,将所述穿刺针伸出所述扩张管,刺破卵圆窝进入左心房。
36.根据本发明实施例的房间穿刺方法,可以利用远程控制系统控制机械臂完成房间隔穿刺手术,不需要在手术床旁操作手术,避免手术过程中射线对术者健康产生影响。而且
通过机器人机械臂精准控制穿刺针穿刺,使整个穿刺过程更稳定、安全、精确、可靠。
附图说明
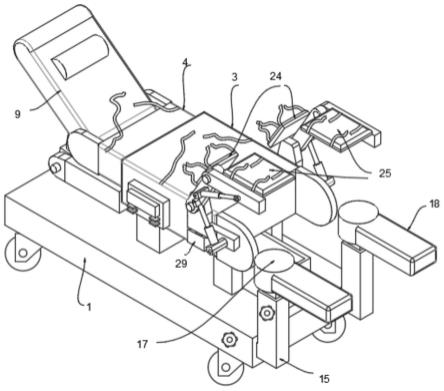
37.图1为根据本发明实施例的穿刺导管的手柄端结构示意图;
38.图2为图1的局部结构剖视图;
39.图3为根据本发明实施例的穿刺导管的传动筒的结构示意图;
40.图4为根据本发明实施例的穿刺导管的第一锥形齿轮结构示意图;
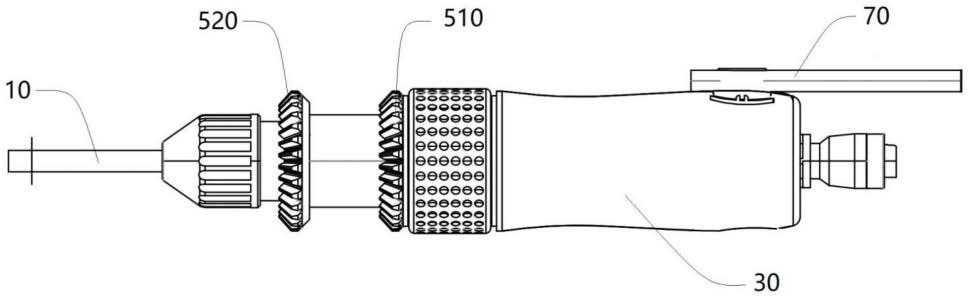
41.图5为根据本发明实施例的穿刺导管的穿刺端结构示意图,其中,穿刺针未伸出扩张管;
42.图6为根据本发明实施例的穿刺导管的穿刺端结构示意图,其中,穿刺针伸出扩张管;
43.图7为根据本发明实施例的穿刺导管的穿刺端结构示意图,其中,穿刺针未伸出扩张管;
44.图8为根据本发明实施例的穿刺导管的穿刺端结构示意图,其中,穿刺针伸出扩张管;
45.图9为根据本发明实施例的房间穿刺方法流程图;
46.图10为根据本发明实施例的房间穿刺方法中穿刺信号控制和流程图。
47.附图标记:
48.扩张管10,内部通道s1,电极110,
49.穿刺针20,
50.手柄30,开关310,
51.传动筒40,限位槽410,外螺纹420,
52.第一锥形齿轮510,内螺纹511,第二锥形齿轮520,限位块521,
53.引导丝60,信号线接口70。
具体实施方式
54.为更进一步阐述本发明为达成预定目的所采取的技术手段及功效,以下结合附图及较佳实施例,对本发明进行详细说明如后。
55.人类的心脏包括右心室、右心房、左心室和左心房,右心房与上静脉腔和下静脉腔连通,三尖瓣将右心房和右心室隔开,二尖瓣将左心房和左心室隔开,右心房由心房间的中隔与左心房分隔开,在手术中左心房是最难进入的,进入左心房使用的最普通的方法是通过心房间中隔穿刺。
56.正常情况下经皮途径导管不能顺行直接到达左心房,虽然可以逆行通过主动脉瓣和二尖瓣的两个转弯进入左心房,但导管操作上很麻烦,穿刺房间隔可使导管经右心房直接到达左心房,早年的房间隔穿刺术主要用于二尖瓣或主动脉瓣狭窄的患者进行左心导管检查。
57.近20年,随着心血管疾病介入治疗的开展,特别是经皮二尖瓣成形术和射频消融术,尤其是房颤射频消融术的蓬勃发展,房间隔穿刺术这项技术开始日益被电生理医生所重视,已经成为电生理医生必须掌握的技术之一。
58.1959年rose等报道了房间隔穿刺术的动物实验,同年cope和ross等首次将房间隔穿刺术应用于临床。初期的房间隔穿刺术,采用经右房导管穿刺针直接穿刺房间隔的方法,1960年brockenbrough和brawnwald等对上述房间隔穿刺方法加以改良,首次引入导引钢丝技术,同时将穿刺针改进为远端渐细的锥形结构,增加了操作的安全性。1977年mullins等为房间隔穿刺导管配置了外鞘,进一步提高了房间隔穿刺术的可操作性和安全性。
59.在手术过程中,首先术者需要经皮穿刺在透视等影像设备的指引下将导引钢丝送入上腔静脉口,通过扩张管沿着导引钢丝将鞘管送入上腔静脉口,再将导引钢丝从鞘管撤出,然后将穿刺针通过鞘管进入到右心房,在影像设备的指引下缓慢回撤。
60.当回撤经过卵圆窝时,穿刺针一共会发生三次跳跃征象:自上腔静脉回撤至右心房为第一次跳跃,再回撤越过主动脉隆凸出现第二次跳跃,最后回撤滑进卵圆窝的底部时产生最为明显的第三次跳跃。
61.术者由此通过手感来判断穿刺针是否到达卵圆窝预定穿刺点,接着术者手工操持穿刺针刺穿房间隔,然后扩张管和鞘管通过穿刺针穿刺的房间隔进入左心房内,最后保持鞘管不动从鞘管内撤出穿刺针和扩张管,完成房间隔穿刺,消融导管等手术器械通过所建立的鞘管通道送入左心房内进行相关手术操作。
62.上述房间隔穿刺手术均是通过术者手工操持穿刺针、鞘管、导引钢丝等手术器材进行手术,手术中不便于确定穿刺点、穿刺方向和穿刺力度,不能精准稳定的控制穿刺针,手工操持穿刺针过程中,由于术者疲劳及人员操作不稳定因素容易影响手术安全,特别是手术过程中心脏穿孔。房间隔穿刺手术步骤繁琐,需要多种手术器械来回切换操作或者同时操作,手术难度和工作量较大,医生培养周期长且学习曲线漫长。
63.具体地,目前临床上使用的房间隔穿刺方法存在以下缺点:
64.1、现有的房间隔穿刺需要术者手工进行操控,无法精准控制穿刺针的插入量,插入过浅就达不到穿刺的效果,插入过深有可能会使心脏穿孔,手工操持穿刺针过程中,由于术者疲劳及人员操作不稳定因素容易影响手术安全。
65.2、现有的房间隔穿刺手术鞘管在指引导丝和扩张管的辅助下进入上腔静脉后,需要将指引导丝抽出后再插入穿刺针,需要分别操控扩张管、穿刺针和指引导丝等部件,导致手术过程繁琐效率较低。
66.3、现有的房间隔穿刺针头端尖锐,且针直径小,无法直接穿过鞘管,需要先放置扩张管,然后再放入穿刺针,过程复杂,并且穿刺针头段划伤或刺破扩张管内壁。
67.4、现有的房间隔穿刺手术需要术者在手术床边进行操作,在射线下长时间的手术对术者健康不利。
68.5、现有的房间隔穿刺手术难以精准判断穿刺针头端是否到达卵圆窝穿刺点,在穿刺导管头端经过卵圆窝时会产生一个跳动,只能凭借术者的手感来感知。
69.本发明重点解决以下问题:
70.1、无法控制穿刺针精准穿刺问题,通过机器人机械臂精准控制穿刺针穿刺,使整个穿刺过程更稳定更安全。
71.2、手术过程繁琐效率低下问题,本发明通过将穿刺针设置于扩张管内利用同一个手柄控制,穿刺针上设有用于插入导丝的内腔,利用指引导丝将扩张管、穿刺针和鞘管同时进入上腔静脉,利用同一个手柄控制穿刺针和扩张管,使整个手术简化,提高穿刺手术效
率。同时,防止穿刺针尖划伤或刺破扩张管内壁。
72.3、术者在射线下手术,对术者身体健康不利的问题,本发明通过将穿刺导管接入机器人平台,利用远程主控系统控制机械臂完成房间隔穿刺手术,不需要在手术床旁操作手术,避免手术过程中射线对术者健康产生影响。
73.4、无法精准判断穿刺导管头端是否到达卵圆窝预定穿刺位置问题,本发明通过在扩张管头端设置电极,在手柄尾端设置有信号线接口,通过信号线接口将扩张管头端电极感测到心脏表面的电信号传输回主控数据处理系统,根据电信号的变化来判断穿刺针头端是否到达卵圆窝。
74.为解决以上问题,本发明提出了一种穿刺导管、穿刺系统及房间隔穿刺方法,通过机器人机械臂控制指引导丝、鞘管、扩张器、穿刺针等器械,将穿刺针导管尖端精准地送至卵圆窝进行穿刺,精准控制穿刺针推进力度和穿刺距离,防止穿刺针过度穿刺,导致心脏穿孔等并发症产生。
75.如图1-图8所示,根据本发明实施例的穿刺导管,包括:扩张管10、穿刺针20、手柄30、第一控制组件和第二控制组件。
76.其中,结合图7所示,扩张管10具有内部通道s1,穿刺针20位于内部通道s1内,扩张管10和穿刺针20均与手柄30连接。
77.第一控制组件和第二控制组件均设于手柄30,第一控制组件用于控制穿刺针20轴向移动,以伸出和缩入扩张管10,第二控制组件用于控制扩张管10和穿刺针20同步转动的。
78.根据本发明实施例的穿刺导管,通过将穿刺针20设置于扩张管10内,利用同一个手柄30控制穿刺针20和扩张管10,使整个手术简化,提高穿刺手术效率。同时,防止穿刺针20尖划伤或刺破扩张管10内壁。通过第一控制组件和第二控制组件可以精准控制穿刺针20穿刺房间隔,使整个穿刺过程更稳定、安全。
79.根据本发明的一些实施例,如图1-图4所示,第一控制组件包括:传动筒40和第一传动齿轮510。
80.其中,传动筒40与穿刺针20和手柄30连接,第一传动齿轮510与传动筒40螺纹连接,第一传动齿轮510相对于手柄30可转动,当第一传动齿轮510转动时,驱动传动筒40带动穿刺针20轴向移动。由此,可以通过控制第一传动齿轮510的转动来控制穿刺针20伸出或缩入扩张管10。当手柄30转动时,带动传动筒40和穿刺针20同步转动。
81.在本发明的一些实施例中,如图1-图4所示,第二控制组件包括:第二传动齿轮520。第二传动齿轮520与扩张管10和传动筒40均固定连接,当第二传动齿轮520转动时,带动扩张管10和穿刺针20以及手柄30同步转动。由此,可以通过控制第二传动齿轮520的转动,来控制扩张管10和穿刺针20同步转动,操作方便。
82.根据本发明的一些实施例,如图2和图3所示,传动筒40设有限位槽410,第二传动齿轮520设有与限位槽410相适配的限位块521,以使第二传动齿轮520转动时带动传动筒40同步转动。
83.需要说明的是,传动筒40和第二传动齿轮520通过限位槽410和限位块521配合连接,可以限制传动筒40与第二传动齿轮520间发生相对转动,从而可以在第二传动齿轮520转动时,通过传动筒40带动穿刺针20同步转动。
84.在本发明的一些实施例中,如图5和图7所示,穿刺导管还包括:引导丝60,穿刺针
20具有供引导丝60穿过的引导通道。引导通道直径不小于0.035mm,用于插入指引导丝60,通过指引导丝60将穿刺导管导入目标心腔和目标血管,在房间隔穿刺前,通过指引导丝60将穿刺导管和电生理导引鞘管引导到上腔静脉口。
85.根据本发明的一些实施例,引导通道还可用于注射预设物质,如图2所示,手柄30设有打开和关闭引导通道的开关310。例如,引导通道还可用于灌注盐水,注射肝素抗凝和心脏dsa造影等,不用时可以关闭穿刺导管手柄30尾端的开关310。
86.在本发明的一些实施例中,扩张管10的端部间隔设有多个电极110。通过在扩张管10头端设置电极110,在手柄30尾端设置有信号线接口70,通过信号线接口70将扩张管10头端电极110感测到心脏表面的电信号传输回主控数据处理系统,根据电信号的变化来判断穿刺针20头端是否到达卵圆窝。
87.根据本发明实施例的穿刺系统,包括:穿刺导管和导管支撑器。
88.其中,穿刺导管为上述所述的穿刺导管,导管支撑器设有与穿刺导管的第一传动齿轮510配合的第三传动齿轮,和与穿刺导管的第二传动齿轮520配合的第四传动齿轮,第三传动齿轮和第四传动齿轮分别连接于机械臂的第一输出轴和第二输出轴。
89.根据本发明实施例的穿刺系统,可以通过机器人机械臂精准控制穿刺针20穿刺,使整个穿刺过程更稳定、安全、精确、可靠。
90.根据本发明的一些实施例,穿刺系统还包括:控制平台,控制平台设于与穿刺导管隔离的操作室,控制平台与机械臂通信连接,控制平台接收控制指令控制机械臂运动。
91.本发明通过将穿刺导管接入控制平台,可以利用远程主控系统控制机械臂完成房间隔穿刺手术,不需要在手术床旁操作手术,避免手术过程中射线对术者健康产生影响。
92.如图9所示,根据本发明实施例的房间穿刺方法,穿刺方法采用如上述所述的穿刺系统进行房间穿刺,方法包括:
93.s100,通过控制平台操控机械臂将穿刺导管的末端送至预设位置;
94.s200,通过控制平台操控机械臂来旋转第一传动齿轮510,将穿刺针20伸出扩张管10,刺破卵圆窝进入左心房。
95.根据本发明实施例的房间穿刺方法,可以利用远程控制系统控制机械臂完成房间隔穿刺手术,不需要在手术床旁操作手术,避免手术过程中射线对术者健康产生影响。而且通过机器人机械臂精准控制穿刺针20穿刺,使整个穿刺过程更稳定、安全、精确、可靠。
96.下面参照附图详细描述根据本发明的穿刺导管、穿刺系统及房间隔穿刺方法。值得理解的是,下述描述仅是示例性描述,而不应理解为对本发明的具体限制。
97.如图1-图8所示,穿刺导管包括:手柄30、扩张管10和穿刺针20,扩张管10头端为锥状结构,扩张管10内部设有内部通道s1,穿刺针20设置于内部通道s1内,扩张管10和穿刺针20同轴安装于手柄30上。
98.手柄30包括穿刺传动组件(可以理解为上文所述的第一传动组件),穿刺传动组件可以控制穿刺针20相对于手柄30和扩张管10轴向前进和后退,穿刺针20前进可使穿刺针20头端伸出扩张管10头端,穿刺针20后退可将穿刺针20缩回扩张管10内。通过机械臂独立控制穿刺针20的前进后退,穿刺针20的前进行程不小于10mm。手柄30上还设有旋转传动组件(可以理解为上文所述的第二传动组件),旋转传动组件可控制整个穿刺导管周向旋转。
99.穿刺传动组件包括套设在靠近手柄30一端穿刺针20主体上的传动筒40,传动筒40
与穿刺针20主体固定连接,传动筒40内侧面设有限位槽410,限位槽410用于限制传动筒40的周向位置,在穿刺导管手柄30整体转动时,传动筒40跟手柄30同步转动,传动筒40外螺纹420连接有第一锥形齿轮(可以理解为上文所述的第一传动齿轮510),第一锥形齿轮可转动连接在手柄30上。
100.由于第一锥形齿轮的内螺纹511与传动筒40外螺纹螺纹连接,当单独转动第一锥形齿轮时,可带动传动筒40以及与传动筒40固定连接的穿刺针20做轴向移动,当传动筒40向手柄30尾端移动时,穿刺针20头端缩回扩张管10内(如图5和图7所示),当传动筒40向手柄30前端移动时,穿刺针20头端伸出扩张管10外(如图6和图8所示),对目标穿刺部位进行穿刺,由此来控制穿刺导管的穿刺过程。
101.旋转传动组件包括固定套设于扩张管10上的第二锥形齿轮,第二锥形齿轮上设有与传动筒40内侧面上的限位槽410相配合的限位块521,使第二锥形齿轮与传动筒40之间的周向位置锁定,由此,通过转动第二锥形齿轮可带动扩张管10和穿刺针20以及整个手柄30除第一锥形齿轮之外的结构转动。
102.由于第一锥形齿轮与传动筒40为螺纹连接,若发生周向的相对转动,会使传动筒40产生轴向的位移。因此,单纯控制穿刺导管的旋转,需同步转动第一锥形齿轮和第二锥形齿轮,从而使第一锥形齿轮与传动筒40保持相对静止。
103.穿刺导管可通过导管支撑器安装在机械臂上,导管支撑器上设有第三锥形齿轮(可以理解为上文所述的第三传动齿轮)和第四锥形齿轮(可以理解为上文所述的第四传动齿轮),将穿刺导管安装在导管支撑器上后,导管支撑器上的锥形齿轮分别与导管手柄30的锥形齿轮相啮合,机械臂两个输出轴分别插入第三锥形齿轮与第四锥形齿轮,并与之啮合。
104.机械臂通过带动第三、第四锥形齿轮转动分别来控制穿刺导管第一、第二锥形齿轮的转动,可通过机械臂以及机械臂支撑器的整体移动来控制穿刺导管的整体轴向移动,将穿刺导管头端送入右心房内。可利用机械臂同时带动第一锥形齿轮和第二锥形齿轮转动,来控制穿刺导管的整体旋转,使穿刺导管头端以正确的角度对准目标穿刺位置。
105.利用机械臂单独带动第一锥形齿轮转动,可以使穿刺针20前进伸出扩张管10外并对目标位置进行精准穿刺,能够实现对穿刺针20前进量的精准控制,防止由于穿刺针20插入过量导致心脏穿孔。
106.穿刺导管可接入机器人平台,通过远程主控系统控制机械臂远程完成房间隔穿刺手术,能够大幅减少术者在射线下的操作时间,大幅减少手术过程中射线对术者产生的危害,使手术过程更安全更高效。
107.如图2所示,穿刺导管内设有指引导通道,引导丝60通道设置于穿刺针20内,引导丝60从穿刺导管手柄30的尾端进入,利用穿刺针20内的引导丝60通道穿过穿刺导管,从穿刺针20的头端穿出穿刺导管,为穿刺导管和电生理导引鞘管起到指引作用,穿刺导管和电生理导引鞘管可沿着牵引丝从皮下血管通路直接到上腔静脉。
108.扩张管10管体为塑料材料,扩张管10外径不小于7fr,可以适配临床电生理可调弯鞘管和固定弯鞘管,穿刺导管头端间隔设有用于接收心脏电信号的电极110,电极110设置于扩张管10锥形头端位置,电极110数量为不少于两个。
109.结合图2和图10所示,电信号通过电极110以及设置于穿刺导管手柄30上的信号线接口70传输回主控数据处理系统,由于卵圆窝位置和心脏其他部位的心电信号有所不同,
本发明通过扩张管10头端电极110接收到的心电信号的变化来辅助判断扩张管10头端是否到达卵圆窝位置,由此提高房间隔穿刺手术穿刺精度。
110.鞘管也可利用与穿刺导管相同的控制方式,由远程主控系统控制机械臂来操控鞘管的推送以及旋转。
111.如图10所示为本发明信号控制和流程图,术者通过医生控制端发送控制指令(穿刺导管和电生理鞘管的三个自由度)至主控数据处理系统,主控数据处理系统接收医生控制端的指令后,操控远端的机械臂控制穿刺导管和电生理鞘管进行相对应的手术动作,利用扩张管10头端电极110接收的心脏电生理信号并传输至主控数据处理系统,由主控数据处理系统再将接收到的电信号处理之后转换为图像信号显示在心电信号显示器上,术者通过波形变化以及透视影像结合来判断是否到达卵圆窝预定穿刺位置,由此进行下一步的操作。
112.以下为本发明的手术工作过程如下:
113.a1,术前准备:术前拍摄心脏三位相,以观察心房的形态、升主动脉的大小和走行方向、胸部及脊柱有无畸形。进行心脏超声检查,测定主动脉及心脏的大小、房间隔的形态,除外左房血栓。
114.a2,器械:0.032英寸145cm长引导丝60、电生理导引鞘管,房间隔穿刺针20,检查穿刺针20角度和鞘管是否匹配。
115.a3,手术开始首先调整机械臂支架,将机械臂调整至合适位置,将穿刺导管从电生理导引鞘管尾端插入,直至穿刺导管头端的锥形扩张管10伸出电生理导引鞘管头端,利用机械臂带动第一锥形齿轮转动,将穿刺针20缩回扩张管10内。
116.a4,将长的指引导丝60经皮穿刺送入上腔静脉,将指引导丝60的尾端插入位于鞘管内穿刺导管的指引导丝60通道,延指引导丝60将穿刺导管和电生理鞘管同步送入上腔静脉。
117.a5,在x射线的指引下,顺时针同步转动穿刺导管和电生理导引鞘管,从下至上看为时钟4-5点的位置,使穿刺导管扩张管10头端电极110接触到心脏内壁,边同步回撤,同时观察扩张管10头端电极110传回的心电信号,直至出现卵圆窝特定的波形信号,此位置即为初步定位的穿刺点。作为另一种方案,可提前由股静脉将超声导管送入右心房,在超声影像下确认卵圆窝位置,然后在超声影像的指引下,将穿刺导管头端移动至卵圆窝处。
118.a6,在后前位透视下适当调整穿刺点的高度(头足方向),在初步确定穿刺点位置的基础上,在右前斜位45度透视下适当旋转电生理导引鞘管,使穿刺针20及鞘管头端影像弧度消失呈直线状或接近直线状,此时鞘管尖的位置即是穿刺点的准确位置。
119.a7,医生通过控制端操控机械臂旋转第一锥形齿轮,将穿刺针20缓慢向前推送伸出穿刺导管扩张管10头端,即可刺破卵圆窝进入左心房,穿刺针20刺破卵圆窝后,控制指引导丝60从穿刺针20头端伸出直至肺静脉口。
120.a8,短距离推送穿刺导管和电生理导引鞘管,将扩张管10头端穿过房间隔进入左心房,然后固定穿刺导管,最后短距离推送电生理导引鞘管,鞘管通过房间隔会遇到较大的阻力,此时应减缓推送速度。
121.a9,电生理导引鞘管进入左心房后固定电生理导引鞘管,将穿刺导管缓慢抽离,心脏房间隔穿刺手术完成。
122.a10,其他手术器械可通过电生理导引鞘管建立的通路,从股静脉经过右心房进入左心房进行手术操作。
123.综上所述,本发明通过将穿刺针20和扩张管10同轴设置于手柄30上,通过一个手柄30分别控制穿刺针20和扩张管10的动作,避免手术中需要操控多个装置,简化了手术过程,更方便操控。
124.穿刺导管可通过机械臂精准控制,提高了房间隔穿刺手术的精度,避免由于术者手工操控穿刺针20插入过多致使心脏穿孔,通过机械臂进行手术,也能减少术者手术工作强度,延长术者的职业生涯。
125.穿刺导管可接入机器人平台并通过远程主控系统完成远程房间隔穿刺手术,避免术者在手术过程中接受过量的射线辐射,危害术者身体健康。
126.穿刺导管的扩张管10头端的电极110可通过信号线接口70传回心脏电信号,可通过电信号波形和透视结合来判断穿刺针20头端是否到达卵圆窝预定穿刺点,提高手术精准度。
127.穿刺导管的穿刺针20内设有指引导丝60通道,指引导丝60能够从手柄30尾端进入穿刺针20指引导丝60通道内,从穿刺针20头端穿出,也可以由指引导丝60通道向穿刺导管头端灌注盐水、注射肝素抗凝和心脏dsa造影等不用时可以关闭,大大了提高手术效率。
128.通过具体实施方式的说明,应当可对本发明为达成预定目的所采取的技术手段及功效得以更加深入且具体的了解,然而所附图示仅是提供参考与说明之用,并非用来对本发明加以限制。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。