1.本技术涉及飞播造林的领域,尤其是涉及一种飞播造林用无人机及其飞播方法。
背景技术:
2.乌梁素海流域包括整个河套灌区、乌梁素海海区、乌拉特前旗、乌拉特中旗与乌拉特后旗的阴山以南部分和磴口县的一部分,流域总面积约1.63万平方千米。
3.乌梁素海流域因垦殖基本无原始植被,因而在乌梁素海流域的治理过程中需要进行飞播造林。目前,飞播造林的主要方式是通过无人机携带播种装置在飞行过程中进行撒种,将球形的种子从高空撒播到播区,从而提高种子的播种效率。
4.由于无人机携带播种装置处于高空区域,使得种子从播种装置掉出后易于受到大风的影响,进而使得种子难以掉落到播区内,降低了播区内种子的播种率,从而不利于环境的修复及治理。
技术实现要素:
5.为了使种子易于在飞播过程中掉落到播区内,本技术提供一种飞播造林用无人机及其飞播方法。
6.第一方面,本技术提供一种飞播造林用无人机,采用如下的技术方案:一种飞播造林用无人机,包括无人机本体、测风组件、喷射组件和调节组件,所述无人机本体上固定设置有储种罐,所述测风组件绕所述无人机本体设置有若干组,所述测风组件用于测量所述无人机本体附近的风速,所述喷射组件包括喷射管和风泵,所述喷射管位于所述储种罐下方,且一端与所述储种罐连通,所述喷射管的中部与所述无人机本体球铰接,所述风泵固定设置在所述无人机本体上,且通过软管与所述喷射管的侧壁连通,所述调节组件设置有若干个,且与所述测风组件一一对应,所述无人机本体上固定设置有控制器,所述控制器用于根据若干个所述测风组件测量的风速通过若干个所述调节组件调节所述喷射管的喷射角度。
7.通过采用上述技术方案,无人机本体带动测风组件、喷射组件、调节组件和储种罐飞行到飞播的高度,若干组测风组件对无人机附近的风速进行测量,且将测量数据传递到控制器,控制器根据测量数据通过若干个调节组件对喷射管的喷射角度进行调节,使得喷射管的喷射角度能够朝向风速测量值最大的方向,喷射管内的种子经风泵加压后喷射出喷射管,使得种子从喷射管喷出后能够具有水平方向的速度,风速与种子水平方向的速度进行相互抵消,从而使得种子易于在喷射后沿竖直方向进行移动,进而降低了风速对种子飞播的影响,进而使得种子易于在飞播过程中掉落到播区内,从而有利于环境的修复和治理。
8.可选的,所述调节组件包括电动推杆,所述电动推杆的固定端与所述无人机本体球铰接,且活动端与所述喷射管靠近所述储种罐的一端球铰接,所述喷射管与所述储种罐通过波纹管连通,所述电动推杆与所述控制器电连接,所述控制器用于根据所述测风组件测量的风速控制所述电动推杆的伸缩。
9.通过采用上述技术方案,由于喷射管的中部与无人机本体球铰接,通过调节若干个电动推杆的伸缩,使得喷射管的顶端能够相对喷射管中部沿任意方向转动,从而使得喷射管的喷射角度能够通过若干个电动推杆进行调节,从而便于环境的修复和治理。
10.可选的,所述测风组件包括风扇、测量块和转速传感器,所述风扇与所述测量块同轴固定设置,且均与所述无人机本体转动连接,所述转速传感器与所述无人机本体固定连接,且用于输出所述测量块的转速信号,所述转速传感器与所述控制器电连接,所述控制器响应于转速信号并控制所述电动推杆的伸缩。
11.通过采用上述技术方案,风扇在风力的吹动下能够进行转动,且风力越大,风扇转动速度越快,由于风扇与测量块同轴固定设置,测量块与风扇同步转动,测量块的转速与风扇的转速相同,转速传感器能够测量出测量块的转速,从而转速传感器能够反映出无人机本体附件风速的大小,从而便于为喷射管方向的调节提供依据。
12.可选的,所述储种罐底部呈倒圆锥形,且内部沿轴线方向设置有若干个倒圆锥形的底板,若干个所述底板上均固定设置有螺旋形的挡板,相邻两个所述底板,位于上方所述底板的底端通过管道与位于下方所述底板的顶端连通,所述挡板的间距大于种子的直径。
13.通过采用上述技术方案,将球形的种子沿挡板的螺旋方向排布放置,使得种子在储种罐内处于整齐排布的状态,从而使得种子在重力的作用下能够沿挡板的螺旋方向有序进行滚动,使得种子在离开储种罐时不易发生堵塞现象,从而使得储种罐的出种易于保持畅通,进而便于环境的修复。
14.可选的,所述储种罐顶部的所述底板的顶端设置有铁球,所述铁球的体积与种子的体积相等,所述储种罐底部的底端连通有磁性材料制造而成的出种口,所述出种口通过波纹管与所述喷射管连通。
15.通过采用上述技术方案,由于铁球的重量大于种子的重量,在重力作用下,铁球能够推动种子进行滚动,使得种子易于从出种口排出,且由于出种口采用磁性材料制造而成,当铁球移动到出种口处时,铁球能够与出种口相互吸附,使得铁球不易从出种口排出,提高了种子飞播过程中的安全性。
16.可选的,所述出种口上设置有电控阀门,所述电控阀门与所述控制器电连接,所述控制器控制所述电控阀门的开闭。
17.通过采用上述技术方案,通过控制器控制电控阀门的开闭,使得种子排出储种罐的时间更加便于控制。
18.可选的,所述喷射管侧壁上连通有进风管,所述进风管相对所述喷射管倾斜设置,且倾斜方向为靠近所述储种罐的方向,所述风泵通过软管与所述进风管连通。
19.通过采用上述技术方案,由于进风管与喷射管倾斜设置,且倾斜方向朝向靠近储种罐的方向,使得风泵经进风管吹入喷射管内的风力能够直接对种子进行加速,进而使得种子易于加速从喷射管喷出。
20.可选的,所述无人机本体上固定设置有太阳能电池板,所述太阳能电池板与所述无人机本体、所述电控阀门、所述转速传感器、所述风泵、所述电动推杆、所述控制器均电连接。
21.通过采用上述技术方案,采用太阳能电池板对无人机本体、电控阀门、转速传感器、风泵、电动推杆、控制器进行供电,提高了飞播造林用无人机的续航能力,从而提高了环
境修复的效率。
22.可选的,所述太阳能电池板位于所述储种罐的正上方,且水平设置。
23.通过采用上述技术方案,将太阳能电池板水平设置在储种罐的上方,使得太阳能电池板易于接收到阳光的照射,使得太阳能电池板易于对无人机本体、电控阀门、转速传感器、风泵、电动推杆、控制器进行供电,同时采用太阳能供电的方式降低了对环境的污染。
24.第二方面,本技术提供一种飞播造林用无人机的飞播方法,采用如下的技术方案:一种飞播造林用无人机的飞播方法,包括以下步骤:装种:将种子填装在所述储种罐内;起飞:控制所述无人机本体携带所述测风组件、所述喷射组件、所述调节组件起飞,直到飞行高度达到播种的高度;测速:所述风扇在空中受风力吹动进行转动,所述风扇带动所述测量块转动,所述转速传感器测量所述测量块的转速,且将测量值传递到所述控制器;排序:所述控制器对若干个测量值进行比较,且将测量值从小到大进行排列;调向:所述控制器根据从小到大排列的测量值,依次调节每个测量值对应的所述电动推杆的伸长距离,且测量值越小,伸长长度越小;喷播:所述风泵将所述储种罐中移动到所述喷射管内的种子加压喷射出所述喷射管,使种子喷射到播区内。
25.通过采用上述技术方案,将种子装填到储种罐内,无人机本体带动测风组件、喷射组件、调节组件进行起飞,直到飞行高度达到播种的高度,风扇在风力的吹动下转动,转速传感器通过测量块对风扇的转速进行测量,然后转速传感器将测量值传递到控制器,控制器对测量值进行从小到大的排列,从而得出无人机本体附件风速大小的排布,控制器根据从小到大排列的测量值依次调节每个测量值相对应的电动推杆的长度,且测量值越小,伸长长度越小,从而使得喷射管能够朝向风速最大的一侧,使得喷射管喷出种子的速度能够与风速相互抵消,从而易于使种子飞播到播区内,进而有利于环境的修复和治理。
26.综上所述,本技术包括以下至少一种有益技术效果:1.转速传感器测量无人机本体附近的风速,且将测量值传递到控制器,控制器根据测量值控制电动推杆的伸缩,从而使得喷射管的喷射角度易于根据风速进行调节,使得种子易于掉落到播区内,从而有利于环境的修复和治理;2.通过在储种罐内设置螺旋形的挡板,使得种子易于畅通地从出种口排出;3.通过设置铁球和磁性材料制成的出种口,易于使种子从档板的螺旋方向进行滚动;4.通过太阳能电池板对飞播造林用无人机供电,提高了飞播造林用无人机的续航能力。
附图说明
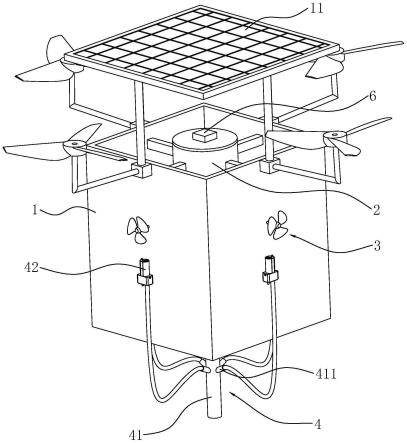
27.图1是本技术实施例的结构示意图;图2是旨在说明调节组件的结构示意图;图3是旨在说明储种罐内部结构的剖面视图;图4是旨在说明测风组件的结构示意图。
28.附图标记说明:1、无人机本体;11、太阳能电池板;2、储种罐;21、底板;22、挡板;221、铁球;23、出种口;231、电控阀门;3、测风组件;31、风扇;32、转轴;33、测量块;34、转速传感器;4、喷射组件;41、喷射管;411、进风管;42、风泵;5、调节组件;51、电动推杆;6、控制器。
具体实施方式
29.以下结合附图1-4对本技术作进一步详细说明。
30.本技术实施例公开一种飞播造林用无人机。参照图1和图2,一种飞播造林用无人机包括无人机本体1、测风组件3、喷射组件4和调节组件5,无人机本体1上设置有储种罐2和控制器6,测风组件3、喷射组件4、调节组件5均设置在无人机本体1上,控制器6与测风组件3、调节组件5连接,测风组件3用于测量无人机本体1附件的风速,调节组件5用于调节喷射组件4的喷射角度,喷射组件4用于喷射种子。
31.使用时,将种子装填到储种罐2内,无人机本体1带动测风组件3、调节组件5、喷射组件4起飞到飞播高度,测风组件3用于测量无人机本体1附近的风速,控制器6根据测风组件3的测量数据通过调节组件5调节喷射组件4的喷射角度,从而使喷射组件4喷射出种子的速度能够与风速相互抵消,使得种子易于掉落到播区内,从而有利于环境的修复。
32.参照图1,无人机本体1水平设置,且呈矩形箱状,无人机本体1的顶部呈开口状,且四个螺旋桨分别位于无人机本体1的四个侧面。
33.参照图1和图2,储种罐2位于无人机本体1的内部,且与无人机本体1固定连接,储种罐2呈圆柱形,且内部中空,储种罐2竖直设置,且底部呈倒圆锥形。
34.参照图3,储种罐2内部固定设置有若干个底板21,若干个底板21均呈倒圆锥形,且沿储种罐2的轴线方向设置,底板21的轴线与储种罐2的轴线重合。
35.若干个底板21的底部均固定设置有螺旋形的挡板22,相邻两个底板21,位于上方底板21的底端通过管道与位于下方底板21上挡板22的顶端连通。
36.储种罐2底部的底端连通有出种口23,出种口23呈圆形管状,且与储种罐2同轴设置,出种口23采用磁性材料制造而成,位于储种罐2顶部的底板21上挡板22的顶端设置有铁球221,铁球221的体积与种子的体积相等,挡板22的间距大于种子的直径。
37.出种口23的底端设置有电控阀门231,控制器6固定设置在储种罐2的顶面,且与电控阀门231电连接,控制器6控制电控阀门231的开闭。
38.使用时,将种子装填入储种罐2内,且沿挡板22的螺旋方向排布,使得种子整齐排放在挡板22上,在位于储种罐2顶部的挡板22的顶端放置铁球221,铁球221能够推动种子进行滚动,当无人机本体1飞行到飞播高度时,控制器6控制电控阀门231打开,使得储种罐2内的种子能够排出储种罐2。
39.参照图1和图2,喷射组件4包括喷射管41和风泵42,喷射管41穿设在无人机本体1的底端,喷射管41的中部与无人机本体1的底端球铰接,喷射管41的顶端通过波纹管与出种口23的底端连通。
40.参照图1,喷射管41的侧壁上连通有四个进风管411,四个进风管411绕喷射管41的轴线方向设置,且分别与无人机本体1的四个侧壁正对设置,四个进风管411均位于无人机本体1外部,进风管411相对喷射管41倾斜设置,且倾斜方向朝向储种罐2。
41.风泵42设置有四个,且分别固定设置在无人机本体1的四个侧面上,四个风泵42与四个进风管411一一对应,风泵42通过软管与自身相对应的进风管411连通。
42.使用时,风泵42将风力从进风管411吹入到喷射管41内,风力对喷射管41内的种子进行加速,使种子加速从喷射管41内喷射出。
43.参照图4,测风组件3、调节组件5均设置有四组,且一一对应。四个测风组件3分别设置在无人机本体1的四个侧壁上,测风组件3包括风扇31、转轴32、测量块33和转速传感器34,转轴32穿设在无人机本体1的侧壁上,且与无人机本体1的侧壁转动连接,转轴32的轴线垂直无人机本体1的侧壁。
44.风扇31位于无人机本体1外部,且与转轴32同轴固定连接。测量块33呈圆柱形,且位于无人机本体1的内部,测量块33与转轴32同轴固定连接。
45.转速传感器34位于无人机本体1内部,且与无人机本体1的侧壁固定连接,转速传感器34的探头朝向测量块33靠近转轴32的一侧,转速传感器34用于输出测量块33的转速信号。
46.参照图2,四个调节组件5绕喷射管41的轴线方向设置,四个调节组件5分别与无人机本体1的四个侧壁正对设置,调节组件5包括电动推杆51,电动推杆51的固定端与无人机本体1的底端球铰接,且活动端与喷射管41的顶端球铰接。
47.参照图4,控制器6与若干个转速传感器34、若干个电动推杆51均电连接,控制器6响应于转速信号并控制电动推杆51的伸缩。
48.使用时,当无人机本体1起飞到飞播高度时,无人机本体1的风力吹动风扇31转动,风扇31通过转轴32带动测量块33转动,转速传感器34测量测量块33的转速,且输出转速信号,控制器6响应于转速信号并控制电动推杆51进行伸缩,从而根据风速通过电动推杆51调节喷射管41的喷射角度,使得喷射管41朝向风速最大的方向,使得种子从喷射管41喷出后能够与风速相互抵消,从而使得种子易于掉落在播区内,进而有利于环境的修复和治理。
49.参照图1和图2,储种罐2的上方设置有太阳能电池板11,太阳能电池板11呈矩形,且水平设置,太阳能电池板11与无人机本体1固定连接,太阳能电池板11与无人机本体1、电控阀门231、风泵42、电动推杆51、控制器6均电连接。
50.参照图1和图4,太阳能电池板11与转速传感器34也电连接。
51.使用时,太阳能电池板11对无人机本体1、电控阀门231、转速传感器34、风泵42、电动推杆51、控制器6均进行供电,提高了飞播造林用无人机的续航能力。
52.本技术实施例一种飞播造林用无人机的实施原理为:使用时,将种子装填入储种罐2内,且使种子沿挡板22的螺旋方向排列,在储种罐2顶部的挡板22的顶端处放置铁球221,然后控制无人机本体1起飞,直到飞行高度达到飞播高度,然后风扇31在风力作用下进行转动,风力越大,风扇31转速越快,同时风扇31带动测量块33转动,转速传感器34测量测量块33的转速,且输出转速信号,控制器6响应于转速信号并控制电动推杆51伸缩,从而调节喷射管41的喷射角度,然后控制器6控制电控阀门231打开,风泵42将风力吹动到喷射管41内,喷射管41内的种子加速喷射出喷射管41,种子的速度与风速相互抵消,使得种子易于飞播到播区内,进而有利于环境的修复和治理。
53.本技术实施例还公开一种飞播造林用无人机的飞播方法,包括以下步骤:装种:将种子填装在储种罐2内,且使种子沿挡板22的螺旋方向排布,在位于储种
罐2顶部的挡板22的顶端处放置铁球221;供电:太阳能电池板11对无人机本体1、电控阀门231、转速传感器34、风泵42、电动推杆51、控制器6均进行供电;起飞:控制无人机本体1携带测风组件3、喷射组件4、调节组件5起飞,直到飞行高度达到飞播高度;测速:风扇31在空中受风力吹动进行转动,风扇31带动测量块33转动,转速传感器34测量测量块33的转速,且将测量值传递到控制器6;排序:控制器6对若干个测量值进行比较,且将测量值从小到大进行排列;调向:控制器6根据从小到大排列的测量值,依次调节每个测量值对应的电动推杆51的伸长距离,且测量值越小,伸长长度越小;开阀:控制器6控制电控阀门231打开;出种:在铁球221的推动及重力作用下,储种罐2内的种子沿挡板22的螺旋方向逐个滚动到出种口23处,且经波纹管滚动到喷射管41内;喷播:风泵42将喷射管41内的种子加压喷射出喷射管41,使种子喷射到播区内。
54.飞播时,将种子装填到储种罐2内的挡板22上,且在位于储种罐2顶部的挡板22的顶端放置铁球221,使得种子易于从储种罐2内排出,且在排出过程中不易发生堵塞现象;通过太阳能电池板11对无人机本体1、电控阀门231、转速传感器34、风泵42、电动推杆51、控制器6均进行供电,提高了飞播造林用无人机的续航能力。
55.然后控制无人机本体1起飞,当起飞高度达到飞播高度时,风扇31在风力作用下带动测量块33进行转动,转速传感器34测量测量块33的转速,并将测量值输出到控制器6,控制器6将若干个测量值从小到大排序,控制器6根据从小到大排序的若干个测量值调节每个测量值相对应的电动推杆51的伸长长度,且测量值越小,电动推杆51的伸长长度越小,从而使喷射管41的喷射角度朝向风速最大的一侧。
56.然后控制器6控制电控阀门231打开,风泵42将风力吹入到喷射管41内,使喷射管41内的种子加速喷射出喷射管41,从而种子喷射出喷射管41的速度与风速相互抵消,使得种子易于掉落在播区内,进而有利于环境修复和治理。
57.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。