1.本发明涉及拐杖技术领域,具体涉及一种用于老年人的智慧出行辅助装置。
背景技术:
2.拐杖是一种重要的辅助行走工具,普遍用于老年人的出行上。现有的拐杖兼具多种功能,拐杖内设置有控制器,控制器控制导航模块、信号模块以及图像识别处理模块等来处理路况信息,通过语音播报的方式引导老年人到达目的地,且通过信号模块和发送模块可实现实时监控老人位置和状态,是老年人智慧出行的必备辅助装置。但是,对于一些听力障碍以及在嘈杂环境下,由于老年人的感官相对较弱,语音导航模式在这种情况下不适用于老年人的导航带路,急需一款能够提供触感导航方式的智慧出行辅助装置。
技术实现要素:
3.本发明的目的是针对上述技术中存在的不足之处,提出一种用于老年人的智慧出行辅助装置,旨在解决上述智慧出行辅助装置不能通过触感导航方式来引导老年人出行的问题。
4.本发明提供了一种用于老年人的智慧出行辅助装置,包括杖体和设置于拐杖内的控制器、导航模块、信号模块以及图像识别处理模块,所述导航模块、信号模块以及图像识别处理模块分别电性连接于所述控制器上,所述杖体包括一级杖体和二级杖体,所述一级杖体上连接有杖头,所述二级杖体固定连接于所述一级杖体端部;所述杖头内弹性设有若干导航示意凸起,所述杖头内两端分别设有第一电动推杆和第一电机,所述第一电机的输出端沿轴向滑动设有滑块,所述滑块的一端与所述第一电动推杆的输出端转动连接,所述滑块上设有梯形凸起,所述第一电动推杆和所述第一电机电性连接于所述控制器上,所述第一电机带动所述梯形凸起转动至与任一所述导航示意凸起贴合,所述第一电动推杆收缩以带动所述滑块在所述第一电机输出端移动,以使所述梯形凸起推动所述导航示意凸起依次的伸出所述杖头来提醒行进方向。
5.进一步地,所述导航示意凸起包括左转示意凸起﹑右转示意凸起以及直行示意凸起,若干个所述直行示意凸起成直线设于所述杖头上部,以用于示意直行;若干个所述左转示意凸起和若干个所述右转示意凸起成直线分别设于所述杖头两侧,以用于示意左转和右转。
6.进一步地,所述左转示意凸起﹑右转示意凸起以及直行示意凸起分别通过单独的限位框设于所述杖头内,所述左转示意凸起﹑右转示意凸起以及直行示意凸起上套接有弹簧,所述左转示意凸起﹑右转示意凸起以及直行示意凸起的端部设有与所述梯形凸起上的斜面平行的切面。
7.进一步地,所述一级杖体上沿周向对称铰接有多根转杆,所述二级杖体上设有用于所述转杆收纳的收纳槽;所述一级杖体内设有第二电动推杆,所述二级杖体内设有第二电机,所述第二电动推杆的输出端转动设有导向柱,所述导向柱的端部与所述第二电机的
输出端滑动连接,所述转杆上位于铰接处设有导向杆,所述导向杆的端部设有导向球,所述导向球位于所述导向柱内。
8.进一步地,所述导向柱沿周向设有三个限位滑槽,所述导向柱上设有一个导向槽,所述导向柱上还设有环形槽,所述环形槽分别与所述限位滑槽和所述导向槽连通,所述导向球位于所述环形槽内。
9.进一步地,所述一级杖体外壁上对应每根转杆处设有一个距离传感器,所述距离传感器﹑第二电动推杆以及第二电机分别电性连接于所述控制器上,每个所述距离传感器控制一根沿周向反方向设置的所述转杆;跌落后的所述杖体依靠多个所述距离传感器来测算与地面间距来,来寻找最接近地面的一个距离传感器,以使所述控制器控制所述第二电机转动带动所述导向柱上的所述导向槽,转动至与所述距离传感器沿周向反方向设置的所述转杆上的导向球处,所述第二电动推杆伸出以推动所述导向球带动所述转杆转动打开。
10.进一步地,所述转杆的端部设有扣勾,所述二级杖体内设有第三电动推杆,所述第三电动推杆的输出端设有环形卡扣,所述第三电动推杆与所述第二电机电性连接,所述第二电机通电时所述第三电动推杆收缩以带动所述环形卡扣脱离所述扣勾,以释放所述转杆的转动自由度。
11.进一步地,所述杖头上设有显示屏,所述显示屏与所述控制器电性连接;所述一级杖体内设有柱状蓄电池,所述柱状蓄电池与所述控制器电性连接。
12.进一步地,所述导向杆为伸缩杆结构,所述导向杆通过转环与所述导向球转动连接。
13.进一步地,所述杖头上套有橡胶套,所述杖头的两侧螺纹连接有密封塞。
14.相对现有技术,具有以下有益效果:
15.本发明提供了一种用于老年人的智慧出行辅助装置,通过在杖头内设置第一电机和第一电动推杆,当设置导航目的地时,控制器控制第一电机驱动滑块转动来是其上的梯形凸起转动至其一导航示意凸起处,第一电动推杆收缩以拉动滑块向前移动来使梯形凸起推动导航示意凸起依次弹出杖头来提示使用者行进方向,以通过递进的触感方式提醒使用者转弯或直行;同时,通过设置左转示意凸起﹑右转示意凸起以及直行示意凸起,可实现三个方向以及掉头的导航指示,且通过结合图像识别处理模块可实现障碍物的提前触感预警,有效提高了老年人出行的安全性,满足智慧出行理念。
附图说明
16.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的优选实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
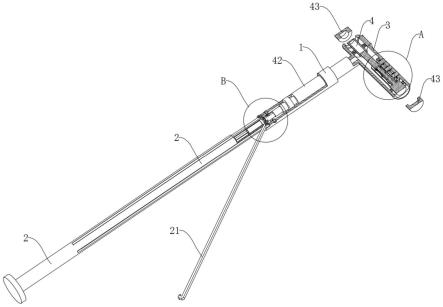
17.图1为本发明一种用于老年人的智慧出行辅助装置的示意图;
18.图2为本发明一种用于老年人的智慧出行辅助装置的内部示意图;
19.图3为本发明一种用于老年人的智慧出行辅助装置的a局部放大示意图;
20.图4为本发明一种用于老年人的智慧出行辅助装置的b局部放大示意图;
21.图5为本发明一种用于老年人的智慧出行辅助装置的导航示意凸起工作示意图;
22.图6为本发明一种用于老年人的智慧出行辅助装置的导向柱工作示意图;
23.图7为本发明一种用于老年人的智慧出行辅助装置的扣勾和环形卡扣配合示意图;
24.图8为本发明一种用于老年人的智慧出行辅助装置的控制原理图。
25.图中,1-一级杖体;2-二级杖体;3-杖头;4-第一电动推杆;5-第一电机;6-滑块;7-梯形凸起;8-第二电动推杆;9-第二电机;10-距离传感器;11-左转示意凸起;12-右转示意凸起;13-直行示意凸起;14-限位框;15-弹簧;16-套管;17-转轴;21-转杆;22-收纳槽;23-导向柱;24-导向杆;25-导向球;26-限位滑槽;27-导向槽;28-环形槽;29-连接柱;31-扣勾;32-第三电动推杆;33-环形卡扣;41-显示屏;42-柱状蓄电池;43-密封塞;44-橡胶套。
具体实施方式
26.为了更易理解本发明的结构及所能达成的功能特征和优点,下文将本发明的较佳的实施例,并配合图式做详细说明如下:
27.实施例1:
28.如图1至图3以及图8所示,本发明提供了一种用于老年人的智慧出行辅助装置,包括杖体和设置于拐杖内的控制器、导航模块、信号模块以及图像识别处理模块,导航模块、信号模块以及图像识别处理模块分别电性连接于控制器上,导航模块用于导航,图像识别处理模块用于识别路况,信号模块用于接收和发送指令或警示。杖体包括一级杖体1和二级杖体2,一级杖体1和二级杖体2为空心结构。一级杖体1上连接有杖头3,二级杖体2固定连接于一级杖体1端部;杖头3内弹性设有若干导航示意凸起,杖头3内两端分别设有第一电动推杆4和第一电机5,第一电机5的输出端沿轴向滑动设有滑块6,滑块6的一端与第一电动推杆4的输出端转动连接;具体地,第一电动推杆4的输出端通过套管16与滑块6转动连接,套管16的两端设置轴承;驱动滑块6转动的转轴17长度满足第一电动推杆4伸缩运动极限时,滑块6不脱离转轴17,为了增加转轴17的长度,可通过在第一电动推杆4的输出端设置凹槽来增加转轴17的长度。滑块6上设有梯形凸起7,第一电动推杆4和第一电机5电性连接于控制器上,第一电机5带动梯形凸起7转动至与任一导航示意凸起贴合,第一电动推杆4收缩以带动滑块6在第一电机5输出端移动,以使梯形凸起7推动导航示意凸起依次的伸出杖头3来提醒行进方向;进一步地,可通过在导航示意凸起上设置提示灯,使梯形凸起7在接触导航示意凸起时接通提示灯的电路通路,使其能够以流线形式闪烁,从而实现从视觉到感官上的导航提示,并结合语音播报来实现三种方式结合的导航提示。
29.具体地,如图6所示,导航示意凸起包括左转示意凸起11﹑右转示意凸起12以及直行示意凸起13,若干个直行示意凸起13成直线设于杖头3上部,以用于示意直行;若干个左转示意凸起11和若干个右转示意凸起12成直线分别设于杖头3两侧,以用于示意左转和右转;当导航提示需要左转时,在到达左转位置时,滑块6在第一电机5的驱动下转动带动梯形凸起7对准左转示意凸起11,第一电动推杆4收缩以带动滑块6向前移动,从而使梯形凸起7依次推动若干个左转示意凸起11来提示老人左转,梯形凸起7活动至通过最后一个左转示意凸起11时,第一电机5转动使滑块6上的梯形凸起7回位至竖直向下,此时,第一电动推杆4伸出以推动滑块6复位完成一次左转提示,每次左转可重复上述过程实现两次以上的提示。同理的,当导航提示需要右转时,在到达右转位置时,滑块6在第一电机5的驱动下转动带动
梯形凸起7对准右转示意凸起12,第一电动推杆4收缩以带动滑块6向前移动,从而使梯形凸起7依次推动若干个右转示意凸起12来提示老人右转,梯形凸起7活动至通过最后一个右转示意凸起12时,第一电机5转动使滑块6上的梯形凸起7回位至竖直向下,此时,第一电动推杆4伸出以推动滑块6复位完成一次右转提示,每次右转可重复上述过程实现两次以上的提示。当导航提示需要直行时,在到达直行位置时,滑块6在第一电机5的驱动下转动带动梯形凸起7对准直行示意凸起13,第一电动推杆4收缩以带动滑块6向前移动,从而使梯形凸起7依次推动若干个直行示意凸起13来提示老人直行,梯形凸起7活动至通过最后一个直行示意凸起13时,第一电机5转动使滑块6上的梯形凸起7回位至竖直向下,此时,第一电动推杆4伸出以推动滑块6复位完成一次直行提示,每次直行可重复上述过程实现两次以上的提示;当需要掉头时,可通过直行示意凸起13和左转示意凸起11结合来提示左方向掉头,直行示意凸起13与右转示意凸起12来提示右方向掉头。
30.具体地,如图6所示,左转示意凸起11﹑右转示意凸起12以及直行示意凸起13分别通过单独的限位框14设于杖头3内,左转示意凸起11﹑右转示意凸起12以及直行示意凸起13上套接有弹簧15。左转示意凸起11﹑右转示意凸起12以及直行示意凸起13的端部设有与梯形凸起7上的斜面平行的切面,以便于滑块6移动带动梯形凸起7可以轻易推动导航示意凸起伸出杖头3。杖头3上设有显示屏41,显示屏41与控制器电性连接;一级杖体1内设有柱状蓄电池42,柱状蓄电池42与控制器电性连接。杖头3上套有橡胶套44,杖头3的两侧螺纹连接有密封塞43,以对杖头3的两侧进行密封处理,图像识别处理模块中的摄像头可设于前端密封塞43上,以便于采集路况信息;进一步地,左转示意凸起11﹑右转示意凸起12以及直行示意凸起13各为三个,梯形凸起7的两侧设有倒角斜面,以便于图像识别处理模块中的摄像头采集到前方有障碍物时,第一电动推杆4收缩带动滑块6移动至梯形凸起7位于三个左转示意凸起11中的第一个左转示意凸起11位置时,第一电机5转动,以使梯形凸起7的倒角斜面转动推动左转示意凸起11﹑右转示意凸起12以及直行示意凸起13来提示障碍物,此模式适用于眼疾老年人或者盲人;进一步地,第一个左转示意凸起11﹑右转示意凸起12以及直行示意凸起13的两侧也设有斜面来与梯形凸起7两侧上的斜面配合,使梯形凸起7转动时,可推动第一个左转示意凸起11﹑右转示意凸起12以及直行示意凸起13依次伸出杖头3。
31.工作原理:通过在杖头3内设置第一电机5和第一电动推杆4,当设置导航目的地时,控制器控制第一电机5驱动滑块6转动来是其上的梯形凸起7转动至其一导航示意凸起处,第一电动推杆4收缩以拉动滑块6向前移动来使梯形凸起7推动导航示意凸起依次弹出杖头3来提示使用者行进方向,以通过递进的触感方式提醒使用者转弯或直行;同时,通过设置左转示意凸起11﹑右转示意凸起12以及直行示意凸起13,可实现三个方向以及掉头的导航指示,且通过结合图像识别处理模块可实现障碍物的提前触感预警。
32.实施例2:
33.如图4和图5所示,结合实施例1的技术方案,本实施例中,一级杖体1上沿周向对称铰接有多根转杆21,二级杖体2上设有用于转杆21收纳的收纳槽22;一级杖体1内设有第二电动推杆8,二级杖体2内设有第二电机9,第二电动推杆8的输出端转动设有导向柱23,导向柱23的一端凸出设置连接凸起,第二电动推杆8的输出端通过轴承与连接凸起转动连接。导向柱23的端部与第二电机9的输出端滑动连接,以使导向柱23可在第二电机9的转动下一起运动,并可在第二电动推杆8的拉动下在第二电机9的输出端的转轴17上直线滑动。进一步
地,导向柱23的端部固定连接有连接柱29,连接柱29与第二电机9输出端的转轴17滑动连接,转轴17的长度应满足第二电动推杆8伸缩运动至极限时,限位柱未脱离连接柱29,使其能够控制导向柱23的转动。连接转杆21上位于铰接处设有导向杆24,导向杆24的端部设有导向球25,导向球25位于导向柱23内。导向柱23沿周向设有三个限位滑槽26,导向柱23上设有一个导向槽27,导向柱23上还设有环形槽28,环形槽28分别与限位滑槽26和导向槽27连通,导向球25位于环形槽28内;环形槽28的一侧倒角,以防止与倾斜的导向杆24出现干涉问题;当四根转杆21都位于收纳槽22内时,四根转杆21上的导向球25均位于环形槽28内,以使导向柱23可在第二电机9的转动下带动导向槽27转动至需要转动打开的转杆21处;第二电动推杆8伸出推动导向柱23直线运动的过程中,三个限位滑槽26始终对其中三根转杆21上的导向球25进行稳定限位,使四根转杆21中的三根在导向柱23直线运动的过程中始终保持不动;进一步地,导向槽27的一侧设有三角斜面,以便于导向柱23收缩回位使,导向球25能够从导向槽27内回位进入环形槽28内。
34.具体地,一级杖体1外壁上对应每根转杆21处设有一个距离传感器10,距离传感器10﹑第二电动推杆8以及第二电机9分别电性连接于控制器上,每个距离传感器10控制一根沿周向反方向设置的转杆21;跌落后的杖体依靠多个距离传感器10来测算与地面间距来,来寻找最接近地面的一个距离传感器10,以使控制器控制第二电机9转动带动导向柱23上的导向槽27,转动至与距离传感器10沿周向反方向设置的转杆21上的导向球25处,第二电动推杆8伸出以推动导向球25带动转杆21转动打开;通过设置多个距离控制器,以使跌落的拐杖可快速识别离地最近的距离传感器10位置,从而通过控制器控制第二电机9和第二电动推杆8来带动导向柱23运动,以推动离地最近距离传感器10反方向的转杆21转动打开,从而便于老年人伸手握住转杆21端部将杖体捡起,方便腿脚不便和不能歪腰的老人拾起拐杖。导向杆24为伸缩杆结构,导向杆24通过转环与导向球25转动连接,以便于导向柱23直线运动时,转杆21在转动时,其导向杆24与导向球25的角度不断变化,来使转杆21能够稳定打开。
35.实施例3:
36.如图7所示,结合实施例2的技术方案,本实施例中,转杆21的端部设有扣勾31,二级杖体2内设有第三电动推杆32,第三电动推杆32的输出端设有环形卡扣33,第三电动推杆32与第二电机9电性连接,第二电机9通电时第三电动推杆32收缩以带动环形卡扣33脱离扣勾31,以释放转杆21的转动自由度;进一步地,第三电动推杆32可以用磁吸机构代替,且第三电动推杆32可通过电性连接控制器来搭配第二电动推杆8工作,使第二电动推杆8工作时,第三电动推杆32提前工作释放转杆21的自由度。
37.实施例4:
38.如图8所示,结合实施例3的技术方案,本实施例中,一级杖体1上还设有心率检测模块、体温检测模块和血压检测模块,用于对老人的心率脉搏、血压等进行监测,心率检测模块、体温检测模块和血压检测模块与信号模块通讯连接,以使信号模块通过发射模块将异常数据反馈给紧急联络人。同时,图像识别处理模块结合距离传感器10可判定老人出现跌倒后未起身,或者突发疾病跌时可通过信号模块和发射模块一键连接医院或者紧急联络人来实现第一时间抢救。导航模块内置有gps定位模块,可防止老年痴呆患者走失。需要说明的是,图8中的驱动器包含第一电动推杆4﹑第一电机5﹑第二电动推杆8﹑第二电机9以及第
三电动推杆32,以便于控制器控制其工作。
39.以上,仅为本发明的较佳实施例,并非对本发明做任何形式上的限制。任何熟悉本领域的技术人员,在不脱离本发明技术方案范围情况下,都可利用上述技术内容对本发明技术方案做出许多可能的变动和修饰,或修改为等同变化的等效实施例。因此,凡是未脱离本发明技术方案的内容,依据本发明的技术对以上实施例所做的任何改动修改、等同变化及修饰,均属于本技术方案的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。