1.本发明涉及机械技术领域,尤其涉及一种用于直流换流站的绝缘子智能清污机器人。
背景技术:
2.换流站户外绝缘设备的可靠运行,是跨区直流输电系统稳定的前提条件。受换流站直流电场的影响,直流绝缘子及套管表面更容易积累污秽,且累积效应明显,增加了运维管理单位防污闪工作的难度。在一定程度上,引起设备泄露电流量上升,甚至提高了设备污闪、雨闪的概率,威胁到电网的长期运行安全。因此,及时有效的清除电气绝缘设备表面的污秽,是降低污闪事故发生频率、保证电网安全运行的重要手段。
3.传统的绝缘子去污手段主要有水冲洗、人工清扫、延长杆清扫等方式。绝缘子水冲洗使用较为广泛,一般对水冲压力、角度要求较高,并且冲洗后的灰密去除效果无法有效保证。人工清扫工作量大、工作强度高,严重依赖操作人员的个人技术熟悉度,并且所需停电时间较长。延长杆清扫存在因力矩原因,不利于在地面控制,存在擦洗死角问题,并且顽固性灰密难以彻底清除。
4.因此,本领域的技术人员致力于开发一种用于直流换流站的绝缘子智能清污机器人,能自适应不同尺寸的绝缘子,能够实现垂直绝缘子的自动清洗功能,环境适应性更强,清洗效率更高。
技术实现要素:
5.有鉴于现有技术的上述缺陷,本发明所要解决的技术问题是如何实现绝缘子的自动清洗,并能适应不同尺寸的绝缘子。
6.为实现上述目的,本发明提供了一种用于直流换流站的绝缘子智能清污机器人,包括移动平台、升降模块、清洗模块,其中,所述移动平台主体为四轮小车,用于保证清洗工作时整体的稳定性;所述升降模块主体为多段连接的升降连杆,底部固定在所述移动平台上,用于实现所述清洗模块的升降功能;所述清洗模块主体为清洗手爪,通过滑移方管与所述升降模块连接,手爪头部配有清洁毛刷,用于清洗绝缘子。
7.进一步地,所述移动平台包括车架、驱动转向轮、安装底板、脚撑;所述驱动转向轮以双前轮、双后轮的方式安装在所述车架两侧;所述安装底板固定在所述车架上方;所述脚撑固定在所述安装底板的四个角下方。
8.进一步地,所述脚撑为可转向两段伸缩式结构,包括第一段脚撑、第二段脚撑;所述第一段脚撑与所述安装底板铰接,所述第二段脚撑沿着所述第一段脚撑内壁滑动,所述第二段脚撑头部设有调节旋杆。
9.进一步地,所述升降模块包括起升绞盘、换向柱、升降连杆、铰接套管、固定铰接座、燕尾滑轨、升降葫芦、同步滑移板、燕尾滑块、滑移滚轮、顶部定滑轮;
10.所述起升绞盘固定在所述安装底板,所述起升绞盘和所述燕尾滑轨中间设有所述
换向柱,所述起升绞盘的绳索绕过所述换向柱固定于所述铰接套管上,用于实现将所述升降连杆起升至竖直状态或放倒至水平放置;
11.两组所述燕尾滑轨并列横向固定在所述安装底板右侧中间位置,两个所述燕尾滑块置于所述燕尾滑轨上,两个所述燕尾滑块上方固定有所述同步滑移板,所述同步滑移板下层上下面分别安装所述升降葫芦和所述滑移滚轮,所述同步滑移板上层上方安装有固定铰接座;
12.所述铰接套管与所述固定铰接座铰接固定;所述铰接套管内使用插销固定所述升降连杆;所述升降连杆由多段铝方管通过内嵌套管和螺丝完成固定连接;所述升降连杆外套有滑移方管;所述升降连杆顶端固定所述顶部定滑轮。
13.进一步地,所述滑移方管内设滚轮,外部安装了清洗固定板和偏转铰接座;所述清洗固定板用于安装所述清洗模块。
14.进一步地,所述升降葫芦的绳索从下往上绕过所述顶部定滑轮后固定在所述清洗模块上,实现所述清洗模块进行竖直方向上的升降清洗。
15.进一步地,所述清洗模块包括配重平板、直线滑轨、推送推杆、公转固定座、公转摇杆、公转电机、公转轮盘、公转拉杆、左右连杆、左右抱臂、清洗毛刷、毛刷电机、开合推杆、毛刷架;所述配重平板前端上方两侧安装有所述直线滑轨,后方固定有所述推送推杆;所述直线滑轨上方安装所述公转固定座,所述公转固定座的尾部使用连接件与所述推送推杆相连;所述公转固定座前方铰接有所述公转摇杆,上方固定所述公转电机;所述公转电机的轴穿透了所述公转固定座驱动着所述公转轮盘;所述公转轮盘通过所述公转拉杆连接了所述公转摇杆;所述公转摇杆两端铰接了所述左右连杆,所述左右连杆的另一端固定于所述左右抱臂两侧;所述左右抱臂上面安装所述清洗毛刷和所述毛刷电机,手爪尾部设有所述开合推杆;所述清洗毛刷使用所述毛刷架固定在所述左右抱臂上。
16.进一步地,所述偏转铰接座与偏转推杆一端固定,所述偏转推杆另一端与所述配重平板固定;通过所述偏转推杆的伸缩,使清洗手爪能够左右偏转用于完成所述清洗模块对准动作。
17.进一步地,所述毛刷架底部装有变径滑块和变径滑轨,所述变径滑轨固定在所述左右抱臂上,移动所述变径滑块能够改变所述清洗毛刷与绝缘子的距离,从而实现清洗不同尺寸的绝缘子。
18.进一步地,所述清洗毛刷共有四个,两两之间的抱臂上装有一倚靠结构,用于抱臂抱紧绝缘子后,给予一定的支撑力,使所述清洗模块更稳定。
19.进一步地,所述倚靠结构装有复位气弹簧,能够适应并倚靠在不同尺寸的绝缘子上。
20.与现有技术相比,本发明至少具有如下有益技术效果:
21.本发明的清污机器人基于电动抓取技术,通过电动升降葫芦使其在竖直方向上灵活移动,实现了垂直绝缘子的清洗功能,且清洗模块头部的毛刷和倚靠结构能自适应不同尺寸的绝缘子,环境适应性更强,清洗效率更高。
22.以下将结合附图对本发明的构思、具体结构及产生的技术效果作进一步说明,以充分地了解本发明的目的、特征和效果。
附图说明
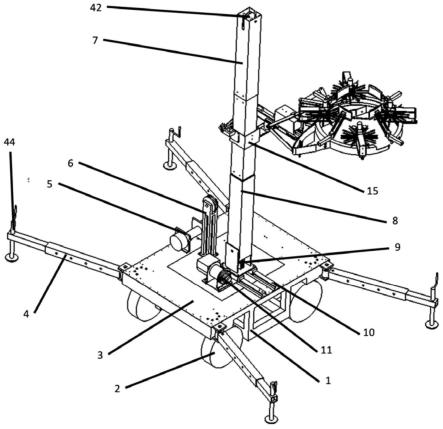
23.图1是本发明的一个较佳实施例的整体结构图;
24.图2是本发明的一个较佳实施例的升降模块结构图;
25.图3是本发明的一个较佳实施例的滑移方管组装图;
26.图4是本发明的一个较佳实施例的清洗模块结构图;
27.图5是本发明的一个较佳实施例的公转清洗手爪结构图;
28.图6是本发明的一个较佳实施例的推送部分结构图;
29.图7是本发明的一个较佳实施例的毛刷清洗头结构图;
30.图8是本发明的一个较佳实施例的毛刷清洗头仰视图;
31.图9是本发明的一个较佳实施例的依靠模块结构图;
32.图10是本发明的一个较佳实施例的升降连杆连接结构图。
33.其中,1-车架,2-驱动转向轮,3-安装底板,4-脚撑,5-起升绞盘,6-换向柱,7-升降连杆,8-铰接套管,9-固定铰接座,10-燕尾滑轨,11-升降葫芦,12-同步滑移板,13-燕尾滑块,14-滑移滚轮,15-滑移方管,16-滚轮,17-清洗固定板,18-偏转铰接座,19-偏转推杆,20-配重平板,21-推送滑轨,22-推送推杆,23-公转固定座,24-推送滑块,25-轮盘固定座,26-公转轮盘,27-公转摇杆,28-公转摇臂,29-左右抱臂,30-清洗毛刷,31-毛刷电机,32-开合推杆,33-毛刷架,34-清洗喷头,35-倚靠滑板,36-变径滑轨,37-变径滑块,38-支撑杆,39-复位轮,40-复位滑块,41-复位气弹簧,42-顶部定滑轮,43-固定孔,44-调节旋杆。
具体实施方式
34.以下参考说明书附图介绍本发明的多个优选实施例,使其技术内容更加清楚和便于理解。本发明可以通过许多不同形式的实施例来得以体现,本发明的保护范围并非仅限于文中提到的实施例。
35.在附图中,结构相同的部件以相同数字标号表示,各处结构或功能相似的组件以相似数字标号表示。附图所示的每一组件的尺寸和厚度是任意示出的,本发明并没有限定每个组件的尺寸和厚度。为了使图示更清晰,附图中有些地方适当夸大了部件的厚度。
36.如图1所示,是本发明的一个较佳实施例的整体结构图,用于对绝缘子进行清理的清污机器人包括移动平台、升降模块和清洗模块;其中升降模块通过滑移方管15与清洗模块连接,升降模块底部与移动平台固定连接。
37.移动平台主体为移动式四轮小车,包括车架1、驱动转向轮2、安装底板3、脚撑4,其布置方式为:车架1的前后车桥各装有2个驱动转向轮2,通过四驱的方式驱动小车前进或后退,另通过前后驱动转向轮2同时控制转向,实现整车阿克曼式转弯,能够在多种复杂环境运行。安装底板3固定在车架1上方,脚撑4以铰接的方式固定在安装底板3的四个角下方,脚撑4为可转向两段伸缩式结构,第一段脚撑与安装底板3铰接,第二段脚撑可沿着第一段脚撑内壁滑动,其头部设有调节旋杆44,用以保证机器人在工作时底部的稳定性。
38.升降模块安装在安装底板3上,包括起升绞盘5、换向柱6、升降连杆7、铰接套管8、固定铰接座9、燕尾滑轨10、升降葫芦11、同步滑移板12、燕尾滑块13、滑移滚轮14,布置方式为:
39.如图10所示,升降连杆7头尾镶嵌连接后,通过固定孔43用螺丝固定连接,组合成
多断连接的升降连杆7;升降连杆7固定在铰接套管8内,经过内嵌套管多段升降连杆7连接固定后成为升降主体。
40.如图2所示,两组燕尾滑轨10并列横向固定在安装底板3右侧中心区域,两个燕尾滑块13用同步滑移板12连接,同步滑移板12下层上方位置固定了升降葫芦11,下方位置设置有滑移滚轮14,同步滑移板12上层上方位置安装有固定铰接座9,铰接套管8与固定铰接座9铰接固定,可通过燕尾滑轨10使升降连杆7在安装底板3的中间到侧边位置滑移。
41.如图3所示,连接后的升降连杆7外部套有滑移方管15,滑移方管15包括滚轮16,外部安装了清洗固定板17和偏转铰接座18,清洗固定板17用于安装清洗模块。
42.升降葫芦11从下往上绕过顶部定滑轮42,固定在安装在清洗固定板17的清洗模块上,实现清洗模块能够在竖直方向上升降清洗。
43.安装在底板3左侧中心位置固定有起升绞盘5,其钢索绕过固定在起升绞盘5和燕尾滑轨10之间的换向柱6,连接在铰接套管8上。由此可实现起升绞盘5拉起水平连接后的升降连杆7到竖直位置或放倒升降连杆7至水平位置。
44.如图4所示,清洗模块主体为清洗手爪,主要有偏转、推送、公转、毛刷自转四个主要功能,另外还有倚靠结构和毛刷变径移动两个辅助功能,其结构包括:
45.如图6所示,推送推杆22固定于配重平板20上,两组推送滑轨21固定在配重平板20前方两侧,一组推送滑轨21固定在配重平板20下方中央位置。轮盘固定座25桥接在上方两个推送滑块24上,公转固定座23上下两块固定板分别固定在轮盘固定座25和下方推送滑块24上,推送推杆22前端与公转固定座23竖板固定。由此结构可实现推送推杆22推送公转模块前进的功能,从而实现清洗手爪的伸缩。
46.如图5所示,公转轮盘26固定于公转固定座23上固定板上,使用固定在轮盘固定座25内部的公转电机驱动。公转固定座23前方铰接有公转摇杆27,公转摇杆27两端与左右两左右抱臂29铰接。公转摇杆27一端又使用公转摇臂28完成与公转轮盘26的铰接传动。公转轮盘26可以拉动公转摇杆27和公转摇臂28,使左右抱臂29以绝缘子为中心公转。左右两左右抱臂29另一端分别与左右抱臂29的左右半环两侧铰接。左右抱臂29的左右半环采用剪叉式连接,尾部装有开合推杆32,开合推杆32伸缩可以使抱臂张开或闭合,以用开合推杆32驱动完成手爪开合动作。由此可实现左右抱臂29以绝缘子为中心的公转清洗运动。
47.如图3所示,偏转功能包括偏转铰接座18和偏转推杆19;偏转推杆19一端与偏转铰接座18固定,另一端与配重平板20固定;通过偏转推杆19的伸缩,使清洗手爪能够左右偏转用于完成清洗模块对准动作。
48.如图7所示,清洗毛刷30通过毛刷架33固定在左右抱臂29上方,毛刷架33用于固定清洗毛刷30,利用固定在毛刷架33上方的毛刷电机31驱动清洗毛刷30,可实现对绝缘子的刷洗工作。在毛刷电机31两侧安装有清洗喷头34,可在清洗时喷出清洗溶剂和清水增强清洗效果。
49.如图8所示,在毛刷架33下方安装有变径滑块37,变径滑块37与变径滑轨36连接,变径滑轨36固定在左右抱臂29上且具有锁定功能,可在展开清洗工作前调节清洗手爪的清洗直径并固定,以此可使清洗手爪适应更多尺寸的绝缘子。
50.如图9所示,所述倚靠模块包括倚靠滑板35,支撑杆38一端与倚靠滑板35铰接,另一端和复位轮39铰接连接;复位滑块40头部与复位轮39固定,尾部连接复位气弹簧41;在左
右抱臂29抱住绝缘子时,倚靠滑板35靠到绝缘子外沿,支撑杆38受力偏转,带动复位轮39转动,使复位滑块40压缩复位气弹簧41,而复位气弹簧41产生反方向弹力复位复位轮39状态,使结构能够产生支撑力而防止清洗手爪下移的效果。
51.以上详细描述了本发明的较佳具体实施例。应当理解,本领域的普通技术无需创造性劳动就可以根据本发明的构思作出诸多修改和变化。因此,凡本技术领域中技术人员依本发明的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。