1.本发明涉及巡检技术领域,具体涉及一种应用于城市交通地下的智能巡检系统。
背景技术:
2.随着经济的快速发展,城市交通压力越来越大,为有效缓解地面交通压力,目前多数城市在大力发展地下交通轨道,通过地铁,有效缓解地面车辆的堵塞,同时带动城市经济的发展。在地下交通轨道(即隧道)中,铺设有大量的管道;为防止管道的破损而带来的安全隐患,需要定期对隧道中的管道进行巡检。
3.目前,大部分地下交通轨道仍采用人工巡检的方式进行巡检,这种方式不但效率低下,而且浪费人工成本;虽然在部分地下交通轨道中,采用少量布置摄像监控的方式,在一定程度上解决效率低下的问题,但无法做到全方位的巡检,若大量布置摄像监控,则会增加维护成本,且给市政带来更大的成本支出。
4.为此,需要有一种能提供更高效、智能巡检系统,以解决上述问题。
技术实现要素:
5.解决的技术问题
6.针对现有技术所存在的上述缺点,本发明提供了一种应用于城市交通地下的智能巡检系统,能够有效地解决现有技术巡检效率低下的问题。
7.技术方案
8.为实现以上目的,本发明通过以下技术方案予以实现:
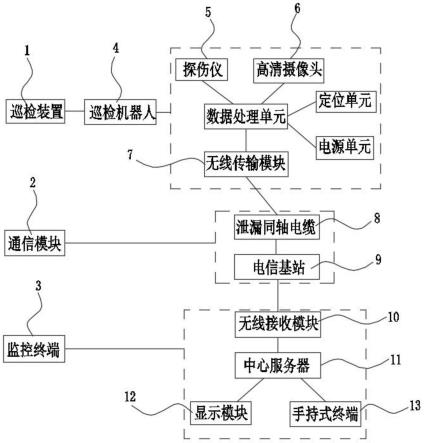
9.一种应用于城市交通地下的智能巡检系统,包括巡检装置、通信模块和监控终端,所述巡检装置沿地下轨道内的管道进行移动,所述巡检装置将检测数据通过通信模块传递至监控终端,所述巡检装置包括巡检机器人以及分别设置在巡检机器人上的探伤仪、多组高清摄像头和无线传输模块,所述通信模块包括布设在地下轨道内的的泄漏同轴电缆和设置在各地铁车站的电信基站,所述电信基站分别通过电缆与泄漏同轴电缆电性连接,所述监控终端包括无线接收模块、中心服务器和显示模块,所述无线接收模块与电信基站通信配合,所述中心服务器分别与中心服务器和显示模块电性连接;
10.其中,所述巡检机器人沿地下轨道内的管道移动时,若探伤仪检测管道存在受损,则巡检机器人自动控制多组高清摄像头对受损点位进行全方位的拍照,并通过无线传输模块,将数据信息传递至泄漏同轴电缆上,泄漏同轴电缆将数据信息传递至最靠近巡检机器人的电信基站,通过电信基站与无线接收模块,使得数据信息传递至中心服务器,最终显示在显示模块上。
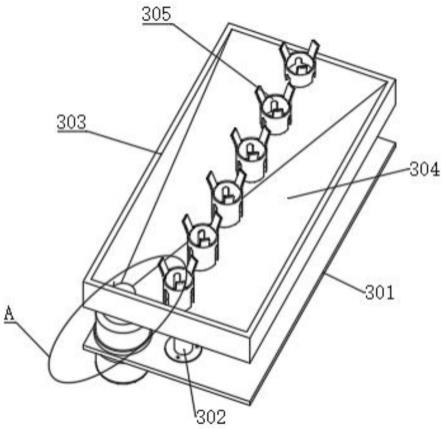
11.更进一步地,所述巡检机器人包括弧架、至少两组从动轮、主动轮机构、平衡件和设置在平衡件上的连接机构,所述弧架一侧开设有凸型槽,所述凸型槽槽口设置有齿条,弧架另一侧设置有弧型探伤头,所述从动轮均通过弹簧杆固定在弧架内侧,所述主动轮机构与多组所述从动轮等角度设置在弧架内侧,主动轮机构用于驱动巡检机器人沿地下轨道内
的管道进行移动,所述连接机构能沿凸型槽滑动,且连接机构能与齿条进行限位配合,所述探伤仪和无线传输模块分别设置在平衡件内,所述探伤仪与所述弧型探伤头电性连接,所述高清摄像头分别通过支板等角度固定连接在远离齿条一侧的弧架上。
12.更进一步地,所述弧架包括长弧架和与长弧架铰接的短弧架,所述长弧架靠近短弧架一端设置有长弧凸出部,所述长弧凸出部内设置有弧滑槽,且长弧凸出部两侧均开设有与弧滑槽相通的弧通口,所述弧滑槽内滑动连接有弧插块,所述弧插块与弧滑槽内壁之间设置有第一弹性件,弧插块侧壁设置有拉把部,所述拉把部远离弧插块一端穿过并穿出弧通口,所述短弧架靠近长弧架一端设置有短弧凸出部,所述短弧凸出部内设置有与弧插块插接配合的插槽。
13.更进一步地,所述长弧架上设置有电机套,所述主动轮机构包括滑套和固定在电机套内的驱动器,所述滑套滑动连接在电机套内,滑套一端穿出电机套且设置有第一凹架,所述第一凹架内通过转轴转动连接有两组主动轮,所述转轴上对称设置有两组第一伞齿轮,所述滑套另一端设置有挡环,所述挡环与电机套内壁之间设置有套设在滑套外侧的第二弹性件,所述滑套内转动连接有驱动轴,所述驱动轴一端穿出滑套并穿入第一凹架内且设置有与两组所述第一伞齿轮啮合的第二伞齿轮,驱动轴另一端开设有矩形槽,所述驱动器输出轴端设置有矩形条,所述矩形条远离驱动器一端穿入矩形槽内。
14.更进一步地,所述弧型探伤头包括固定在长弧架内侧的长弧型探伤头和固定在短弧架内侧的短弧型探伤头。
15.更进一步地,所述连接机构包括滑动在凸型槽内的滚轮以及能与齿条啮合的限位齿轮,所述滚轮侧壁开设有轮槽,所述轮槽内设置有与之同轴的轴管,所述轴管侧壁对称开设有滑口,所述限位齿轮滑动在轴管外侧,且限位齿轮中部开设有齿孔,所述齿孔内设置有横条,所述横条两端分别穿过并穿出滑口,横条远离轮槽一侧固定有顶杆,所述顶杆远离横条一端穿出轴管且转动连接有按压盘,所述限位齿轮与轮槽内壁之间设置有套设在轴管外侧的第三弹性件,所述轴管一端穿出轮槽且转动连接有连接架,所述连接架与平衡件固定连接。
16.更进一步地,所述平衡件内还设置有数据处理单元、定位单元和电源单元。
17.更进一步地,所述支板上还设置有多组补光灯。
18.更进一步地,所述中心服务器包括数据处理器和终端数据存储器。
19.更进一步地,所述还包括手持式终端,所述中心服务器通过终端基站与手持式终端通信连接。
20.有益效果
21.采用本发明提供的技术方案,与已知的公有技术相比,具有如下有益效果:
22.本发明通过巡检机器人自动沿地下交轨道内的管道进行移动,从而探伤仪对管道进行自动巡检,并对受损处进行拍照,不仅提高巡检效率,而且有效避免全程摄像,有效降低巡检机器人的耗电量,提高其巡检路程,并减少员工持续观看影像,降低员工的工作压力,同时通过拍照信息,确定受损点状况,为后续修复提供准备。
附图说明
23.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现
有技术描述中所需要使用的附图作简单地介绍。显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
24.图1为本发明的巡检系统示意图;
25.图2为本发明的巡检机器人第一视角结构示意图;
26.图3为本发明的巡检机器人第二视角结构示意图;
27.图4为本发明的巡检机器人部分截面结构示意图;
28.图5为本发明的图4中a处放大结构示意图;
29.图6为本发明的弧架结构示意图;
30.图7为本发明的弧架截面结构示意图;
31.图8为本发明的主动轮机构结构示意图;
32.图9为本发明的连接机构爆炸结构示意图;
33.图中的标号分别代表:1、巡检装置;2、通信模块;3、监控终端;4、巡检机器人;41、弧架;4101、凸型槽;4102、齿条;4103、长弧架;4104、短弧架;4105、长弧凸出部;4106、弧通口;4107、弧插块;4108、第一弹性件;4109、拉把部;4110、短弧凸出部;42、从动轮;43、主动轮机构;4301、滑套;4302、驱动器;4303、第一凹架;4304、主动轮;4305、第一伞齿轮;4306、挡环;4307、第二弹性件;4308、驱动轴;4309、第二伞齿轮;4310、矩形槽;4311、矩形条;44、平衡件;45、弧型探伤头;4501、长弧型探伤头;4502、短弧型探伤头;46、弹簧杆;47、支板;4701、补光灯;48、电机套;49、连接机构;4901、滚轮;4902、限位齿轮;4903、轴管;4904、滑口;4905、横条;4906、顶杆;4907、按压盘;4908、第三弹性件;4909、连接架;5、探伤仪;6、高清摄像头;7、无线传输模块;8、泄漏同轴电缆;9、电信基站;10、无线接收模块;11、中心服务器;12、显示模块;13、手持式终端。
具体实施方式
34.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
35.下面结合实施例对本发明作进一步的描述。
36.实施例
37.本实施例的一种应用于城市交通地下的智能巡检系统,参照图1-9:包括巡检装置1、通信模块2和监控终端3,巡检装置1沿地下轨道内的管道进行移动,巡检装置1将检测数据通过通信模块2传递至监控终端3,巡检装置1包括巡检机器人4以及分别设置在巡检机器人上的探伤仪5、多组高清摄像头6和无线传输模块7,通信模块2包括布设在地下轨道内的的泄漏同轴电缆8和设置在各地铁车站的电信基站9,电信基站9分别通过电缆与泄漏同轴电缆8电性连接,监控终端3包括无线接收模块10、中心服务器11和显示模块12,无线接收模块10与电信基站9通信配合,中心服务器11分别与中心服务器11和显示模块12电性连接;
38.其中,巡检机器人4沿地下轨道内的管道移动时,若探伤仪5检测管道存在受损,则巡检机器人4自动控制多组高清摄像头6对受损点位进行全方位的拍照,并通过无线传输模
块7,将数据信息传递至泄漏同轴电缆8上,泄漏同轴电缆8将数据信息传递至最靠近巡检机器人4的电信基站9,通过电信基站9与无线接收模块10,使得数据信息传递至中心服务器11,最终显示在显示模块12上。
39.通过巡检机器人4自动沿地下交轨道内的管道进行移动,从而探伤仪5对管道进行自动巡检,并对受损处进行拍照,不仅提高巡检效率,而且有效避免全程摄像,有效降低巡检机器人4的耗电量,提高其巡检路程,并减少员工持续观看影像,降低员工的工作压力,同时通过拍照信息,确定受损点状况,为后续修复提供准备。
40.其中,巡检机器人4包括弧架41、至少两组从动轮42、主动轮机构43、平衡件44和设置在平衡件44上的连接机构49,弧架41一侧开设有凸型槽4101,凸型槽4101槽口设置有齿条4102,弧架41另一侧设置有弧型探伤头45,从动轮42均通过弹簧杆46固定在弧架41内侧,主动轮机构43与多组从动轮42等角度设置在弧架41内侧,主动轮机构43用于驱动巡检机器人4沿地下轨道内的管道进行移动,连接机构49能沿凸型槽4101滑动,且连接机构49能与齿条4102进行限位配合,探伤仪5和无线传输模块7分别设置在平衡件44内,探伤仪5与弧型探伤头45电性连接,高清摄像头6分别通过支板47等角度固定连接在远离齿条4102一侧的弧架41上。
41.具体的,弧架41横截面为工型结构,从而提高弧架41整体结构强度,弹簧杆46的杆端均设置有第二凹型架,从动轮42分别转动在第二凹型架内。
42.通过设置弧架41,使得弧架41能避让用于支持管道的支撑架,从而巡检机器人4能沿管道进行移动;本技术方案中,从动轮42优选两组,则主动轮机构43位于两组从动轮42之间,且主动轮机构43与从动轮42之间的夹角均为120
°
,则通过两组从动轮42与主动轮机构43,能保证弧架41沿管道进行移动,并避免弧架41从管道上脱落;平衡件44质量远大于主动轮机构43,平衡件44用于平衡位于管道外侧的弧架41,即当管道悬挂在轨道顶部内时,此时主动轮机构43位于管道的下侧,则平衡件44位于主动轮机构43的下侧,进而保证弧架41稳定位于管道外侧,避免弧架41围绕管道轴线进行晃动;当管道悬挂在轨道左右侧壁时,此时主动轮机构43位于管道远离轨道左右侧壁的一侧,则为避免主动轮机构43重力迫使弧架41围绕管道轴线进行转动,进而将平衡件44位于弧架41的底侧方,使得平衡件44与主动轮机构43之间的角度大于90
°
,进而平衡弧架41,使得弧架41稳定位于管道外侧。
43.具体的,弧架41包括长弧架4103和与长弧架4103铰接的短弧架4104,长弧架4103靠近短弧架4104一端设置有长弧凸出部4105,长弧凸出部4105内设置有弧滑槽,且长弧凸出部4105两侧均开设有与弧滑槽相通的弧通口4106,弧滑槽内滑动连接有弧插块4107,弧插块4107与弧滑槽内壁之间设置有第一弹性件4108,弧插块4107侧壁设置有拉把部4109,拉把部4109远离弧插块4107一端穿过并穿出弧通口4106,短弧架4104靠近长弧架4103一端设置有短弧凸出部4110,短弧凸出部4110内设置有与弧插块4107插接配合的插槽。
44.当需要将弧架41放置在管道时,先拨动拉把部4109,使弧插块4107一端从插槽移出,则长弧架4103与短弧架4104解锁,进而可将长弧架4103与短弧架4104打开,从而可将弧架41放在管道外侧,之后再关闭长弧架4103与短弧架4104,再松开拉把部4109,则在第一弹性件4108的作用下,使得弧插块4107一端再次插入插槽内,实现长弧架4103与短弧架4104的锁定,继而保证弧架41结构的牢固性;通过将弧架41设置为转动配合的长弧架4103与短弧架4104,进而便于将弧架41放置在管道外侧。
45.其中,弧型探伤头45包括固定在长弧架4103内侧的长弧型探伤头4501和固定在短弧架4104内侧的短弧型探伤头4502;从而使得长弧架4103与短弧架4104打开时,长弧型探伤头4501与短弧型探伤头4502也打开,便于将弧型探伤头45放置在管道外侧。
46.长弧架4103上设置有电机套48,主动轮机构43包括滑套4301和固定在电机套48内的驱动器4302,滑套4301滑动连接在电机套48内,滑套4301一端穿出电机套48且设置有第一凹架4303,第一凹架4303内通过转轴转动连接有两组主动轮4304,转轴上对称设置有两组第一伞齿轮4305,滑套4301另一端设置有挡环4306,挡环4306与电机套48内壁之间设置有套设在滑套4301外侧的第二弹性件4307,滑套4301内转动连接有驱动轴4308,驱动轴4308一端穿出滑套4301并穿入第一凹架4303内且设置有与两组第一伞齿轮4305啮合的第二伞齿轮4309,驱动轴4308另一端开设有矩形槽4310,驱动器4302输出轴端设置有矩形条4311,矩形条4311远离驱动器4302一端穿入矩形槽4310内。
47.通过滑套4301与电机套48的滑动连接,从而使得主动轮4304能沿滑套4301轴线方向移动,进而在第二弹性件4307的作用下,使得主动轮4304具有一定的减震作用,并通过与弹簧杆46的配合,提高弧架41移动的稳定性,同时使得主动轮4304与从动轮42均能通过用于支撑管道的支撑环;通过矩形条4311与矩形槽4310的配合,不仅使得驱动器4302能带动驱动轴4308转动,而且使得驱动轴4308与矩形条4311滑动配合,进而当驱动轴4308随滑套4301进行移动时,保证第一伞齿轮4305与第二伞齿轮4309啮合,从而保证驱动器4302驱动两组主动轮4304转动,实现弧架41沿管道进行移动。
48.连接机构49包括滑动在凸型槽4101内的滚轮4901以及能与齿条4102啮合的限位齿轮4902,滚轮4901侧壁开设有轮槽,轮槽内设置有与之同轴的轴管4903,轴管4903侧壁对称开设有滑口4904,限位齿轮4902滑动在轴管4903外侧,且限位齿轮4902中部开设有齿孔,齿孔内设置有横条4905,横条4905两端分别穿过并穿出滑口4904,横条4905远离轮槽一侧固定有顶杆4906,顶杆4906远离横条4905一端穿出轴管4903且转动连接有按压盘4907,限位齿轮4902与轮槽内壁之间设置有套设在轴管4903外侧的第三弹性件4908,轴管4903一端穿出轮槽且转动连接有连接架4909,连接架4909与平衡件44固定连接。
49.当需要平衡弧架41时,即需要调节平衡件44与主动轮机构43之间的角度时,先按压按压盘4907,使得限位齿轮4902脱离齿条4102,并使得限位齿轮4902移入轮槽内,则解除滚轮4901与凸型槽4101的限位,进而能沿凸型槽4101方向,移动滚轮4901;当松开按压盘4907后,则在第三弹性件4908的作用下,使得限位齿轮4902移出轮槽,并啮合在两组齿条4102之间,从而对滚轮4901进行限位,使得滚轮4901无法沿凸型槽4101进行移动,进而保证平衡件44与弧架41的位置关系不变。
50.通过横条4905与滑口4904的配合,不仅实现限位齿轮4902与轴管4903的滑动连接,而且对限位齿轮4902的移动距离进行限位,保证限位齿轮4902与齿条4102啮合;通过连接架4909与轴管4903的转动连接,进而在移动连接机构49时,使得平衡件44始终垂直向下,便于调节弧架41位于管道外的稳定性。
51.为提高拍照清晰度,在支板47上还设置有多组补光灯4701。
52.其中,在平衡件44内还设置有数据处理单元、定位单元和电源单元;定位单元用于定位受损位置,数据处理单元用于对接收的探伤数据进行分析,若数值大于标准数值,则控制高清摄像头6进行拍照,同时数据处理单元还用于将拍照数据、探伤数据和定位数据传递
至无线传输模块7,电源单元则用于提供工作电源。
53.中心服务器11包括数据处理器和终端数据存储器;数据处理器用于将接收的拍照数据、探伤数据和定位数据进行分析和整合,并将数据显示在显示模块12上,终端数据存储器用于将数据进行存储。
54.本技术方案还包括手持式终端13,中心服务器11通过终端基站与手持式终端13通信连接;从而员工可通过手持式终端13,直接获取相关数据。
55.以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不会使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。