技术特征:
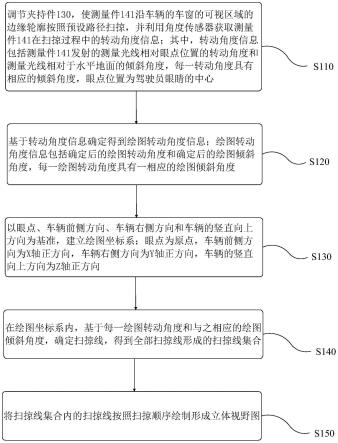
1.一种车辆立体视野的测量方法,其特征在于,所述测量方法通过测量装置测量车辆立体视野,所述测量装置包括夹持件和测量机构;所述测量机构包括测量件和角度传感器;所述测量件夹持于所述夹持件上,所述角度传感器设于所述测量件上;所述夹持件可相对所述车辆转动,以带动所述测量件转动;所述测量方法包括如下步骤:调节所述夹持件,使所述测量件沿所述车辆的车窗的可视区域的边缘轮廓按照预设路径扫掠,并利用所述角度传感器获取所述测量件在扫掠过程中的转动角度信息;其中,所述转动角度信息包括所述测量件发射的测量光线相对眼点位置的转动角度和所述测量光线相对于水平地面的倾斜角度,每一所述转动角度具有相应的所述倾斜角度,所述眼点位置为驾驶员眼睛的中心;基于所述转动角度信息确定得到绘图转动角度信息;所述绘图转动角度信息包括确定后的绘图转动角度和确定后的绘图倾斜角度,每一所述绘图转动角度具有一相应的所述绘图倾斜角度;以所述眼点、所述车辆前侧方向、所述车辆右侧方向和所述车辆的竖直向上方向为基准,建立绘图坐标系;所述眼点为原点,所述车辆前侧方向为x轴正方向,所述车辆右侧方向为y轴正方向,所述车辆的竖直向上方向为z轴正方向;在所述绘图坐标系内,基于每一所述绘图转动角度和与之相应的所述绘图倾斜角度,确定扫掠线,得到全部所述扫掠线形成的扫掠线集合;将所述扫掠线集合内的所述扫掠线按照扫掠顺序绘制形成立体视野图。2.根据权利要求1所述的测量方法,其特征在于,所述预设路径是基于以所述车窗的左上角为起点,按照顺时针方向沿所述车窗的可视区域的边缘轮廓形成。3.根据权利要求1所述的测量方法,其特征在于,所述基于所述转动角度信息确定得到绘图转动角度信息具体包括:提取所述转动角度信息,并删除所述转动角度信息中的噪音数据。4.根据权利要求1所述的测量方法,其特征在于,所述车窗包括所述车辆位于驾驶室的左侧车窗、前车窗和右侧车窗;所述调节所述夹持件,使所述测量件沿车窗的可视区域的边缘轮廓按照预设路径扫掠具体包括:调节所述夹持件,使所述测量件沿所述左侧车窗的可视区域的边缘轮廓按照预设路径扫掠;调节所述夹持件,使所述测量件沿所述前车窗的可视区域的边缘轮廓按照预设路径扫掠;调节所述夹持件,使所述测量件沿所述右侧车窗的可视区域的边缘轮廓按照预设路径扫掠。5.根据权利要求1所述的测量方法,其特征在于,所述测量装置还包括第一连接件和安装件;所述第一连接件安装于所述车辆的车窗上且位于所述车辆内;所述安装件可转动地连接于所述第一连接件背离所述车窗的一侧;所述夹持件可转动地设于所述安装件;在所述调节所述夹持件之前,所述测量方法还包括:调节所述安装件,使所述测量件位于所述眼点位置。6.一种测量装置,用于测量车辆立体视野,其特征在于,所述测量装置包括:
第一连接件,所述第一连接件安装于所述车辆的车窗上且位于所述车辆内;安装件,所述安装件可转动地连接于所述第一连接件背离所述车窗的一侧;夹持件,所述夹持件可转动地设于所述安装件;测量机构,所述测量机构包括测量件和角度传感器;所述测量件夹持于所述夹持件上,以在所述夹持件的带动下转动;所述角度传感器设于所述测量件上。7.根据权利要求6所述的测量装置,其特征在于,所述测量装置还包括支撑单元;所述支撑单元包括:第二连接件,所述第二连接件设于所述车窗上且位于所述车辆内;及第一支撑件和第二支撑件,所述第一支撑件的一端铰接于所述第二连接件背离所述车窗的一侧,所述第一支撑件的另一端插设于所述第二支撑件;所述第二支撑件用于插设所述安装件,以支撑所述安装件。8.根据权利要求7所述的测量装置,其特征在于,所述第二连接件为吸盘。9.根据权利要求6所述的测量装置,其特征在于,所述夹持件包括第一夹持部、第二夹持部和固定部;所述第一夹持部的一端转动安装于所述安装件;所述第二夹持部开设有凹槽,所述凹槽和所述第一夹持部共同界定形成所述夹持间隙;所述固定部插设于所述第一夹持部和第一夹持部,以将所述测量机构夹紧于所述夹持间隙。10.根据权利要求6所述的测量装置,其特征在于,所述测量装置还包括连接架;所述连接架可移动地安装于所述安装件远离所述第一连接件的一端;所述夹持件借助所述连接架可转动地设于所述安装件并位于所述连接架远离所述安装件的一端,所述夹持件可绕其与所述连接架的连接处转动。
技术总结
本发明涉及一种测量方法和测量装置,测量方法包括如下步骤:调节夹持件,使测量件沿车辆的车窗的可视区域的边缘轮廓按照预设路径扫掠,并利用角度传感器获取测量件在扫掠过程中的转动角度信息;眼点位置为驾驶员眼睛的中心;基于转动角度信息确定得到绘图转动角度信息;以眼点、车辆前侧方向、车辆右侧方向和车辆的竖直向上方向为基准,建立绘图坐标系;在绘图坐标系内,基于绘图转动角度信息包括的每一绘图转动角度和与之相应的绘图倾斜角度,确定扫掠线,得到全部扫掠线形成的扫掠线集合;将扫掠线集合内的扫掠线按照扫掠顺序绘制形成立体视野图。如此,能够提高测量车辆立体视野的自动化程度和智能化程度,同时也能够减小测量人员的工作量。量人员的工作量。量人员的工作量。
技术研发人员:王明剑 王修齐 刘书友 郭平 迟君 周立斌 李瑞雪 陆帅 施井才 王凯 张昊昱 冯适 董宇
受保护的技术使用者:一汽解放汽车有限公司
技术研发日:2022.08.15
技术公布日:2022/11/15
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。