1.本发明涉及无人机等移动设备的供电领域,尤其涉及一种系留无人机移动供电装置、滑触线及电源小车。
背景技术:
2.现有技术,大多数电动无人机因电池容量有限,空中飞行时间短。系留无人机通过地面电源供电,由电缆将电能输送至无人机,则可以实现连续不间断飞行。而目前的系留无人机电源多为地面固定式和车载移动式,地面固定式电源供电,因系留电缆长度通常为100~500米,限制了系留无人机的活动半径。车载移动式电源供电,通常是将发电机组或电池组搭载在汽车上,经电缆向空中系留无人机供电,活动范围限于车辆行进路线的周边,无法飞行到车辆无法到达的偏远的山地、林区等地方。系留无人机随车飞行,还需车辆配合飞行,另增加了人力成本和车辆费用。
技术实现要素:
3.本发明的目的在于提供一种移动供电装置,以解决系留无人机等移动设备的移动式供电问题。
4.为解决上述技术问题,本发明采用的技术方案是:一种系留无人机移动供电装置,包括电源小车及导轨,所述电源小车与所述导轨配装在一起,能沿所述导轨移动,通过电连接向系留无人机等移动设备移动式供电。
5.进一步的,所述电源小车搭载电源适配单元;或所述电源小车搭载电源适配单元及电缆收放器;所述电源小车通过电源适配单元与电缆连接,所述电缆另一端与系留无人机连接;所述导轨或为钢轨或为导轨线;所述电源小车在所述导轨上移动所需动力有两种,一种是外部的牵引力,另一种是电源小车的自带动力。
6.进一步的,所述电源小车搭载电池组或发电装置,向系留无人机等移动设备移动式供电。
7.进一步的,所述导轨平行安装滑触线,所述导轨和所述滑触线沿系留无人机预设的飞行路径架设于地面;所述滑触线包括滑触电源线、用于支撑及固定滑触电源线的绝缘支座;所述电源小车能在所述导轨上沿所述滑触线移动,并与滑触电源线电连接。
8.进一步的,所述电源小车包括机体、承重及导向组件、滑触式电接头组件:所述机体上安装所述承重及导向组件,所述承重及导向组件包括支架及安装在支架上的导轮,导轮承载电源小车能在所述导轨上移动;所述滑触式电接头组件包括安装在支架上的滑触集电刷、压紧弹簧,通过压紧弹簧将滑触集电刷压紧贴合在所述滑触电源线表面;
所述承重及导向组件与所述滑触式电接头组件或合二为一,即承重及导向组件既起到承重及导向作用又起到与滑触电源线电连接作用。
9.一种滑触线分布式供电系统,包括滑触线、分布式发电装置,所述滑触线包括滑触电源线及支撑构件;所述分布式发电装置与所述滑触电源线电连接,能向所述滑触电源线供电;所述分布式发电装置为单个或多个;所述多个分布式发电装置沿所述滑触线的路径上间隔式布置,分段向滑触电源线供电。
10.进一步的,所述滑触线能配装如权利要求1或2所述的导轨及电源小车,所述的电源小车向系留无人机等移动设备移动式供电;所述分布式发电装置为新能源发电装置。
11.一种电源小车,包括机体、承重及导向组件、螺旋桨组件:所述机体上方安装所述承重及导向组件,所述承重及导向组件能配装在如权利要求1或2所述的导轨上,承载整个电源小车的重量并沿所述导轨移动;所述机体外侧安装所述螺旋桨组件,能为电源小车提供移动所需的动力;所述电源小车能独立运行,或通过连接电缆向外部移动设备移动式供电。
12.进一步的,所述电源小车在如权利要求5所述的电源小车的所述机体外侧安装所述螺旋桨组件,经如权利要求5所述的滑触电源线接入电源,为电源小车提供移动所需的动力;所述导轨或为导轨线。
13.一种滑触线,能用于滑触式供电;导轨线:为承力拉线,与所述滑触电源线平行设置,能挂载配装如权利要求1或2或8所述的电源小车;绝缘支架:用于支撑及固定滑触电源线和导轨线,同时起电绝缘作用,沿线间隔布置;所述滑触电源线与导轨线或合二为一,滑触电源线既是输电线同时起到导轨线的功用。
14.有益效果本发明提供的移动供电装置,滑触线结构简单,便于长距离架设。采用滑触线分布式供电系统,可降低因长距离传输电能的损耗。将新能源发电装置用于滑触线分布式供电系统,具有低碳环保价值。电源小车靠螺旋桨推力作动力,省去了复杂的机械传动结构,便于操控及维护。本发明可解决系留无人机等移动设备的在预设路线范围的移动式供电问题。滑触线沿所要监控的路线架设于地面,通过滑触式供电,系留无人机就能超长时间沿预设的路线飞行,并可在飞行途中随时随地停留在空中,而不用担心缺电的问题。
15.附图说明
16.以下是本发明各附图的说明:图1是系留无人机移动供电装置总体布置示意图;图2是带有导轨结构的滑触线与电源小车配装在一起的剖视图;图3是滑触电源线与导轨线合二为一的滑触线与电源小车配装在一起的剖视图;
图4是图3的s-s剖视图;图5是图4的r-r断面图;图6是电源小车安装螺旋桨组件的主视图;图7是图6的俯视图;图8是电源小车安装多组螺旋桨组件且承重及导向组件与滑触式电接头组件合二为一的主视图;图9是滑触电源线为四线的滑触线与电源小车配装在一起的主视图;图10是滑触电源线与导轨线分别设置的滑触线与电源小车配装在一起的主视图;图11是电源小车挂载在单根导轨线上的主视图;图12是图11的p向视图;图13是滑触线分布式供电系统总体布置示意图。
17.图中标记列表:1
─ꢀ
系留无人机,11
─ꢀ
电缆,2
─ꢀ
导轨,21
─ꢀ
钢轨,22
─ꢀ
导轨线,221
─ꢀ
导轨线支架,3
─ꢀ
电源小车,31
─ꢀ
机体,311
─ꢀ
电缆收放器,312
─ꢀ
电源适配单元,32
─ꢀ
承重及导向组件,321
─ꢀ
支架,322
─ꢀ
导轮,33
─ꢀ
滑触式电接头组件,331
─ꢀ
滑触集电刷,332
─ꢀ
压紧弹簧,34
─ꢀ
螺旋桨组件,35
─ꢀ
电缆导管,4
─ꢀ
滑触线,41
─ꢀ
滑触电源线,411
─ꢀ
滑触电源线,42
─ꢀ
绝缘支座,421
─ꢀ
绝缘支架,422
─ꢀ
电线夹,423
─ꢀ
绝缘支架,424
─ꢀ
绝缘垫,5
─ꢀ
立柱,6
─ꢀ
分布式发电装置,61
─
电缆
具体实施方式
18.下面结合附图及实施例对本发明技术方案作进一步说明。
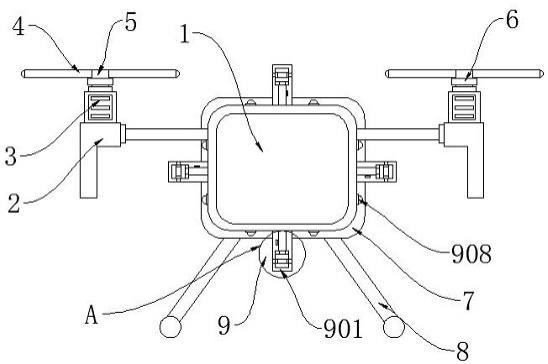
19.图1是系留无人机移动供电装置总体布置示意图。如图1所示,电缆11一端与系留无人机1相连,电缆11另一端连接电源小车3。电源小车3与导轨2配装在一起,能沿导轨2移动,向系留无人机等移动设备移动式供电。导轨2沿系留无人机预设的飞行路径架设于地面的立柱5上,系留无人机可依靠电源小车3移动供电,长距离长时间飞行。电源小车3可搭载电池组或发电装置进行供电。电源小车3可根据需要搭载电源适配单元以及电缆收放器。
20.导轨2可以是钢轨或导轨线。导轨2可以平行安装滑触线,电源小车3可从滑触线上获取电能。
21.电源小车3在导轨2上移动所需动力可以是系留无人机的牵引力,电源小车也可以自带动力,例如,导轮由自带的机械传动装置驱动,在导轨上行走。
22.图2所示实施例,是带有导轨结构的滑触线与电源小车配装在一起的剖视图。
23.滑触线4包括滑触电源线41、用于支撑及固定滑触电源线41的绝缘支座42、用于承载电源小车3的钢轨21。绝缘支座42上安装有绝缘垫424对滑触电源线41进行电绝缘隔离。
电源小车3能承载在钢轨21上沿滑触线4移动;钢轨21与滑触电源线41平行设置。
24.电源小车3包括机体31、承重及导向组件32、滑触式电接头组件33。机体31上安装承重及导向组件32,承重及导向组件32包括支架321及安装在支架321上的导轮322,导轮322承载电源小车3能在钢轨21上移动。滑触式电接头组件33包括安装在支架321上的滑触集电刷331、压紧弹簧332,通过压紧弹簧332将滑触集电刷331压紧贴合在滑触电源线41表面。
25.电源小车3靠外部的牵引力,如利用系留无人机飞行时的牵引力沿钢轨21行走。或电源小车3自带动力,例如,驱动导轮322转动,电源小车3就能沿钢轨21行走。
26.图中,机体31外侧安装电缆导管35,对电缆11起支撑及引导作用。滑触线与导轨平行安装,导轨和滑触线沿系留无人机预设的飞行路径架设于地面。
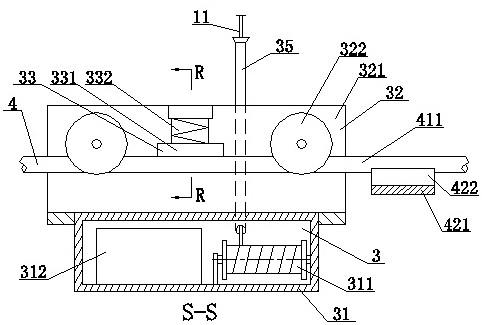
27.图3所示实施例,滑触线4的滑触电源线411与导轨线22合二为一,滑触电源线411既是输电线同时起到导轨线的承重及导向功用。图4是图3的s-s剖视图,图5是图4的r-r断面图。
28.图示,滑触线4,包括滑触电源线411、绝缘支架421。滑触电源线411通过电线夹422与绝缘支架421装配在一起,电线夹422对滑触电源线411起夹持固定作用。绝缘支架421同时起电绝缘及支撑作用。
29.电源小车3,包括机体31、承重及导向组件32、滑触式电接头组件33。机体31上方安装承重及导向组件32和滑触式电接头组件33。如图5所示,滑触式电接头组件33的压紧弹簧332将滑触集电刷331压紧贴合在裸金属导线的滑触电源线411表面,实现电连接。
30.如图4所示,承重及导向组件32的导轮322承载在滑触电源线411上,承载整个电源小车3的重量,导轮322能沿滑触电源线411滚动,导轮322同时起到移动过程的导向作用。如果将导轮322设计为导电体,则能与滑触电源线411电连接,取代滑触集电刷331的功能,即承重及导向组件32既起到承重及导向作用又起到与滑触电源线411电连接作用,即两者合二为一。
31.在机体31内放置电源适配单元312,电源适配单元312的一端通过滑触式电接头组件33与滑触电源线411电连接,另一端连接电缆11,向系留无人机1供电。当滑触电源线411提供的电源参数与系留无人机所需电源参数不一致时,由电源适配单元312进行调节。在机体31内固定放置电缆收放器311,电源小车3便可对系留无人机1的电缆11进行收放。当然,电缆收放器也可放置在系留无人机上。
32.图6所示实施例,在电源小车3的机体31外侧安装两组螺旋桨组件34,提供移动所需的推动力,导轮322挂载电源小车3沿滑触电源线411移动。图7是图6的俯视图,如图示,滑触电源线411既是导电线,又是导轮322的导轨线,承载电源小车3的重量,即滑触电源线411与导轨线合二为一。电源小车3挂载在滑触线4上,绝缘支架421安装在立柱5上,立柱5支撑全部重量。沿线间隔布置的绝缘支架423用于在空间支撑及固定滑触电源线411,使各滑触电源线411保持平行,同时起电绝缘作用。经滑触集电刷331从滑触电源线411接入电源,为螺旋桨组件34提供动力。
33.电源小车3与滑触线4配装在一起,靠螺旋桨推力独立地在滑触电源线411上运行,相当于在导轨上滑行的飞行器。电源小车3也可连接电缆向外部的系留无人机等移动设备移动式供电。电源小车3的外形可设计为流线型,以减少移动时的空气阻力。
34.图8所示实施例,电源小车3安装多组螺旋桨组件34,可增强动力。通过对各组螺旋桨控制,可调整推力方向,当滑触电源线411有升降坡度时,调整推力方向有助于推动电源小车3沿坡道移动时更省力。如图示,承重及导向组件32包括支架321、滑触集电刷331,取消了导轮,即承重及导向组件32由轮式组件变更为滑触组件,滑触集电刷331贴合在滑触电源线411上,同时滑触集电刷331的凹槽形内表面与滑触电源线411接触,可起导向作用,承重及导向组件32与滑触式电接头组件合二为一,即承重及导向组件32既起到承重及导向作用又起到与滑触电源线411电连接作用。
35.图9所示实施例,滑触电源线411为四线的滑触线4与电源小车3配装在一起。承重及导向组件32安装的四组导轮322与四线的滑触电源线411相配合。
36.图10所示实施例,滑触线4的滑触电源线411与导轨线22分别设置,导轨线22为具有相应强度的金属线或非金属线,为承力拉线,与滑触电源线411平行布置,导轨线22起到承重及导向作用,导轨线22通过导轨线支架221安装在绝缘支架421上。电源小车3通过承重及导向组件32的导轮322挂载在导轨线22上,并能沿导轨线22移动。滑触式电接头组件33通过压紧弹簧332将滑触集电刷331压紧贴合在滑触电源线411表面。
37.图11所示实施例,导轨由单根导轨线22构成,电源小车3通过承重及导向组件32挂载在导轨线22上,机体31外侧安装螺旋桨组件34。若机体31搭载电池组或发电装置,靠自带电力驱动螺旋桨组件,电源小车3就能沿导轨线22移动。若电源小车3连接外部电缆输出电能,就能向外部用电设备移动式供电。发电装置可以为燃油发电装置,或者为清洁能源发电装置,如核电等发电装置。导轨线22为单根,结构简单,造价低。
38.图12是图11的p向视图,如图示,导轨线22通过导轨线支架221与立柱5装配在一起。作为支撑构件,沿线间隔布置的立柱5支撑导轨线22及所吊挂的电源小车3的全部重量。
39.图13所示实施例,系留无人机移动供电装置采用滑触线分布式供电系统。电源小车3挂载在导轨2上,电源小车3端部外侧安螺旋桨组件34,可推动电源小车3沿导轨2移动。电源小车3经电缆11向系留无人机1移动式供电。滑触线4与导轨2平行设置,或两者合二为一。滑触线4安装在主柱5的上端,主柱5为滑触线4的地面支撑构件。安装于地面的分布式发电装置6通过电缆61与滑触线4电连接,向滑触线4供电。电源小车3与滑触线4进行滑触式电连接,从滑触线4上获取电能。如果滑触线长度比较短,分布式发电装置为单个既可满足供电需求。如果系留无人机飞行距离长,滑触线长度相应增加,沿滑触线的路径上需要安装多个分布式发电装置,间隔式布置,以便分段向滑触线供电。分段供电可降低因长距离传输电能造成的电能损耗。分布式发电装置为新能源发电装置,如风电、光伏等发电装置。
40.本发明技术方案,可以应用于无人飞行器、航行器等移动设备的移动式供电,满足长距离长时间供电的需求。电源小车本身也可单独运行作为移动平台使用。
41.本说明书的描述术语“连接”,主要是指电连接。以上基于附图的说明及各实施方式,仅为便于说明本发明技术方案,本领域技术人员应当理解的是,以上各实施方式仅用于解释本发明的技术原理,并非旨在限制本发明的保护范围,本发明的保护范围显然不局限于这些具体实施方式。在不偏离本发明的原理的前提下,本领域技术人员可以根据需要对其做出其它变化或变型,可以对相关技术特征作出等同的更改或替换,这些更改或替换之后的技术方案都将落入本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。