1.本实用新型涉及无人机领域,具体为一种无人机落水自救保护设备。
背景技术:
2.无人机在航拍、农业、植保、微型自拍、快递运输、灾难救援、观察野生动物、监控传染病、测绘、新闻报道、电力巡检、救灾、影视拍摄等领域应用广泛,而无人机在空中飞行且发生故障后,若是降落区域在水上时,若没有自救保护设备,会导致无人机直接坠入水中进而造成无人机的损坏。
3.现有的无人机落水自救保护设备,若无人机在夜晚落水时,由于水面上光线较暗,导致工作人员难以精准定位无人机的落水位置,进而极大增大了对无人机的搜寻难度。
技术实现要素:
4.基于此,本实用新型的目的是提供一种无人机落水自救保护设备,以解决在夜晚难以准确搜寻到无人机落水的具体位置的技术问题。
5.为实现上述目的,本实用新型提供如下技术方案:一种无人机落水自救保护设备,包括无人机主体,所述无人机主体的外壁四周均设有机架,所述无人机主体上设有警示组件,所述警示组件包括声光报警器和外筒,所述外筒的内部开设有空腔和通槽,所述空腔的内部安装有电磁铁环和电磁铁块,所述电磁铁块上设有磁环,所述外筒的外壁开设有多个通水孔,所述通槽的内部安装有水位传感器。
6.通过采用上述技术方案,水可通过通水孔流入至外筒的内部,同时水位传感器可检测进入至外筒内部的水位。
7.进一步的,所述空腔与通槽连通,所述电磁铁块与磁环接触。
8.通过采用上述技术方案,以便水通过空腔流入至通槽的内部,且电磁铁块通电后产生磁性进而可吸附磁环。
9.进一步的,所述磁环的外壁与通水孔接触,所述电磁铁环的内径小于磁环的内径。
10.通过采用上述技术方案,电磁铁环通电可产生磁性进而可吸附磁环,磁环与通水孔接触后可对其封堵,防止外部杂质随意通过通水孔进入至外筒的内部。
11.进一步的,所述机架上安装有驱动电机,所述驱动电机的输出端通过驱动轴连接有转叶,所述驱动轴上设有扭矩传感器。
12.通过采用上述技术方案,驱动电机工作可带动驱动轴转动,驱动轴转动后会带动转叶转动,转叶转动后可使无人机主体升降。
13.进一步的,所述无人机主体内部设有控制器,所述扭矩传感器、驱动电机、电磁铁环、电磁铁块、水位传感器和声光报警器均与控制器电性连接。
14.通过采用上述技术方案,控制器可启动或关闭扭矩传感器、驱动电机、电磁铁环、电磁铁块、水位传感器和声光报警器。
15.进一步的,所述机架的底部安装有支架,所述无人机主体的外壁设有气囊。
16.通过采用上述技术方案,支架可对机架起到支撑作用,同时当无人机落水时,气囊的设置可使无人机漂浮于水面,防止无人机落入水里。
17.综上所述,本实用新型主要具有以下有益效果:
18.1、本实用新型通过设置有警示组件,当扭矩传感器检测到驱动轴不再转动时,其会传输信号至控制器,控制器则关闭电磁铁块并启动电磁铁环,电磁铁环通电产生磁性进而吸附磁环,使得磁环不再遮挡通水孔,此时无人机落水后一个外筒会浸入水中,而水会通过通水孔流入至外筒的内部,当水液面超过水位传感器时,水位传感器会传输信号至控制器,控制器则启动声光报警器,声光报警器则会发出报警声并亮出灯光,以便提高无人机的亮度,使得在夜晚期间工作人员可以精准定位无人机的落水位置,进而提高了对无人机的搜寻效率,便于快速打捞无人机,防止无人机长时间泡水而导致损坏。
附图说明
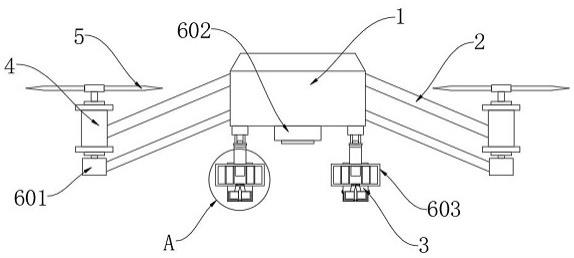
19.图1为本实用新型的整体正剖局部结构示意图;
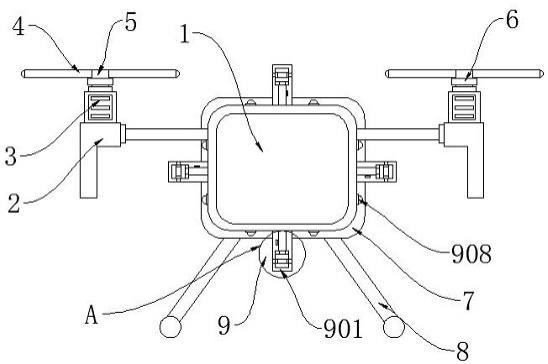
20.图2为本实用新型的整体俯视结构示意图;
21.图3为本实用新型的图1中a处的放大图;
22.图4为本实用新型的外筒立体局部结构示意图。
23.图中:1、无人机主体;2、机架;3、驱动电机;4、转叶;5、驱动轴;6、扭矩传感器;7、气囊;8、支架;9、警示组件;901、外筒;902、通槽;903、水位传感器;904、电磁铁环;905、磁环;906、通水孔;907、电磁铁块;908、声光报警器;909、空腔。
具体实施方式
24.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述。下面通过参考附图描述的实施例是示例性的,仅用于解释本实用新型,而不能理解为对本实用新型的限制。
25.下面根据本实用新型的整体结构,对其实施例进行说明。
26.一种无人机落水自救保护设备,如图1、图2、图3和图4所示,包括无人机主体1,无人机主体1的外壁四周均设有机架2,无人机主体1上设有警示组件9。
27.具体的,警示组件9包括声光报警器908和外筒901,声光报警器908和外筒901均设于无人机主体1的外壁,外筒901的内部开设有空腔909和通槽902,空腔909的内部安装有电磁铁环904和电磁铁块907,电磁铁块907上设有磁环905,外筒901的外壁开设有多个通水孔906,水可通过通水孔906流入至外筒901的内部,空腔909与通槽902连通,电磁铁块907与磁环905接触,磁环905的外壁与通水孔906接触,电磁铁环904的内径小于磁环905的内径,电磁铁环904通电可产生磁性进而可吸附磁环905,磁环905与通水孔906接触后可对其封堵,防止外部杂质随意通过通水孔906进入至外筒901的内部,通槽902的内部安装有水位传感器903。
28.参阅图1和图2,机架2上安装有驱动电机3,驱动电机3的输出端通过驱动轴5连接有转叶4,驱动轴5上设有扭矩传感器6,驱动电机3工作可带动驱动轴5转动,驱动轴5转动后会带动转叶4转动,转叶4转动后可使无人机主体1升降,无人机主体1内部设有控制器,扭矩传感器6、驱动电机3、电磁铁环904、电磁铁块907、水位传感器903和声光报警器908均与控
制器电性连接,控制器可启动或关闭扭矩传感器6、驱动电机3、电磁铁环904、电磁铁块907、水位传感器903和声光报警器908,机架2的底部安装有支架8,无人机主体1的外壁设有气囊7,支架8可对机架2起到支撑作用,同时当无人机落水时,气囊7的设置可使无人机漂浮于水面。
29.本实施例的实施原理为:首先,使用者可启动驱动电机3,驱动电机3工作带动驱动轴5转动,进而带动转叶4转动,转叶4转动后可使无人机主体1在空中飞行;
30.当扭矩传感器6检测到驱动轴5不再转动时,其会传输信号至控制器,控制器则关闭电磁铁块907并启动电磁铁环904,电磁铁环904通电产生磁性进而吸附磁环905,使得磁环905不再遮挡通水孔906,此时无人机落水后一个外筒901会浸入水中,而水会通过通水孔906流入至外筒901的内部,当水液面超过水位传感器903时,水位传感器903会传输信号至控制器,控制器则启动声光报警器908,声光报警器908则会发出报警声并亮出灯光,以便提高无人机的亮度,使得在夜晚期间工作人员可以精准定位无人机的落水位置;
31.且无人机主体1落水时,气囊7的设置可使无人机主体1漂浮在水面,从而防止无人机主体1直接坠入水里,进而可对无人机主体1进行防护。
32.尽管已经示出和描述了本实用新型的实施例,但本具体实施例仅仅是对本实用新型的解释,其并不是对实用新型的限制,描述的具体特征、结构、材料或者特点可以在任何一个或多个实施例或示例中以合适的方式结合,本领域技术人员在阅读完本说明书后可在不脱离本实用新型的原理和宗旨的情况下,可以根据需要对实施例做出没有创造性贡献的修改、替换和变型等,但只要在本实用新型的权利要求范围内都受到专利法的保护。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。