1.本发明涉及一种桥梁施工用车辆的控制方法,具体涉及一种桥梁底面施工用自平衡作业车的控制方法。
背景技术:
2.在现有技术中,对于桥梁底面施工,需要大型桥梁作业车移动至桥梁底或固定至水面上,再利用升降装置将作业平台移动到桥梁的周围,进行相应的作业,作业平台一般不超过3个人,主要用于桥梁工程的安装、检测等,大型桥梁作业车移动并固定在湿软的河床上或水面上非常不方便;并且作业平台常需要根据不同的作业要求进行转动、升降,而对于作业平台上,其本身由于采用转动连接,且无自平衡装置,在人员站上作业平台上时,常常造成作业平台发生因人员的重量造成晃动不稳,对作业人员的安全造成影响。
技术实现要素:
3.基于上述技术问题,本发明提供一种桥梁底面施工用自平衡作业车的控制方法,其中,桥梁底面施工用自平衡作业车包括车体1、设置在车体1上的旋转台2、设置于旋转台2上的第一升降机构3、设置于第一升降机构3上的水平机构4、设置于水平机构4上的第二升降机构5、转动设置于第二升降机构5底部的作业平台6。
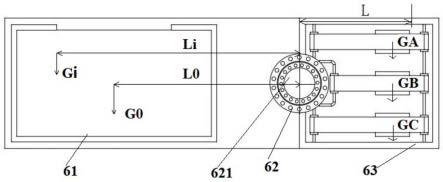
4.优选地,作业平台6包括作业部61、转动部62、自平衡部63,转动部62包括转动驱动机构和回转支撑轴承621,在作业平台6的作业部61上设置有围栏(611)以及均匀设置在作业部61底部多个压力传感器,多个压力传感器组成传感器阵列;每个作业人员作业时的重量为gi,作业人员距回转支撑轴承621中心的水平距离为li,其中i表示第i个作业人员;作业部61自身重量为g0,作业部61自身重心距回转支撑轴承621中心的水平距离为l0。
5.优选地,自平衡部63包含配重块a、配重块b、配重块c、配重驱动部分和配重控制系统,配重块a、配重块b、配重块c分别固定连接在输送机构a、输送机构b和输送机构c上,配重块a的重量为ga,配重块b的重量为gb,配重块c的重量为gc。
6.优选地,控制方法具体为:
7.(1)初始状态时,配重块a距回转支撑轴承621中心的水平初始距离为la0,配重块b距回转支撑轴承621中心的水平初始距离为lb0,配重块c距回转支撑轴承621中心的水平初始距离为lc0,配重块a、配重块b、配重块c在移动时,距回转支撑轴承621中心的水平最大距离均为l;当作业部61上有人员变化时,配重控制系统控制配重块a、配重块b、配重块c产生移动,假定配重块a、配重块b、配重块c相对初始位置向远离回转支撑轴承621中心方向移动的距离分别为
△
la、
△
lb、
△
lc,则配重块a、配重块b、配重块c相对初始位置向远离回转支撑轴承621中心方向移动的最大距离
△
lamax=l-la0,
△
lbmax=l-lb0,
△
lcmax=l-lc0;
8.初始状态时,la0=lb0=lc0=g0*l0/(ga gb gc)。
9.优选地,(2)当多个压力传感器检测到有1个作业人员站到作业平台时,即i=1,该作业人员作业时的重量为g1,该作业人员在水平方向上距回转支撑轴承621中心的水平距
离为l1,配重块a、配重块b、配重块c向远离回转支撑轴承621中心方向移动的距离为:
10.△
la=
△
lc=0,
11.△
lb=g1*l1/gb。
12.优选地,(3)当多个压力传感器检测到有2个作业人员站到作业平台时,即i=2,该作业人员作业时的重量分别为g1、g2,该作业人员在水平方向上距回转支撑轴承621中心的水平距离为l1、l2;配重块a、配重块b、配重块c向远离回转支撑轴承621中心方向移动的距离分别为:
13.△
la=
△
lc=(g1*l1 g2*l2)/(ga gc),
14.△
lb=0。
15.优选地,(4)当多个压力传感器检测到有3个作业人员站到作业平台时,即i=3,该作业人员作业时的重量分别为g1、g2、g3,该作业人员在水平方向上距回转支撑轴承621中心的水平距离为l1、l2、l3;配重块a、配重块b、配重块c向远离回转支撑轴承621中心方向移动的距离为:
16.△
la=
△
lc=(g1*l1 g2*l2 g3*l3-gb*(l-lb0))/(ga gc),
17.△
lb=
△
lbmax=l-lb0;
18.优选地,(5)当多个压力传感器检测到有超过3个作业人员站到作业平台时,即i>3,系统报警提示超载。
19.本发明的发明点和有益的技术效果:通过在作业平台上设置自平衡部,通过自平衡部中的传感器阵列检测作业人员作业时的重量,其不仅仅包括作业人员自身的重量,还包括因作业而产生的重量变化,其检测的为总的重量,并根据总的重量适时调整自平衡部三个配重块的位置,进而实现实时动态的调整,从而稳定作业平台,减少对转动部结构的机械损伤,提高作业人员的安全性。
附图说明
20.图1-作业车整体三维视图;
21.图2-图1的俯视图;
22.图3-作业时实施示意图1;
23.图4-作业时实施示意图2;
24.图5-作业时实施示意图3;
25.图6-作业时实施示意图4;
26.图7-作业时省去桥梁的示意图;
27.图8-作业平台示意图。
28.图中,车体1、旋转台2、第一升降机构3、立柱31、滑动套32、第一升降丝杆驱动机构33、水平机构4、水平导轨41、水平滑块42、水平丝杆驱动机构43、第二升降机构5、第一升降架51、第二升降架52、第二升降丝杆驱动机构53、作业平台6、作业部61、围栏611、转动部62、回转支撑轴承621、自平衡部63、支撑脚7。
具体实施方式
29.下面结合具体实施方式对本发明作进一步的说明。其中,附图仅用于示例性说明,
表示的仅是示意图,而非实物图,不能理解为对本专利的限制;为了更好地说明本发明的实施例,附图某些部件会有省略、放大或缩小,并不代表实际产品的尺寸;对本领域技术人员来说,附图中某些公知结构及其说明可能省略是可以理解的。
30.本发明实施例的附图中相同或相似的标号对应相同或相似的部件;在本发明的描述中,需要理解的是,若有术语“上”、“下”、“左”、“右”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此附图中描述位置关系的用语仅用于示例性说明,不能理解为对本专利的限制,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语的具体含义。
31.为了获得独立的保护,本发明将桥梁底面施工用自平衡作业车的方法和装置分开进行申请,一桥梁底面施工用自平衡作业车,其包括车体1、车体1上的旋转台2、设置于旋转台2上的第一升降机构3、设置于第一升降机构3上的水平机构4、设置于水平机构4上的第二升降机构5、转动设置于第二升降机构5底部的作业平台6。
32.四个支撑脚7可折叠地设置于车体1的四角处,支撑脚7包括可转动连接在车体1转动部以及设置于转动部内部可升降的升降脚部,在作业车移动时,可将四个支撑脚7可折叠在车体1内,在作业车作业时,四个支撑脚7在车体1的四角处伸展开来,升降脚部可接触桥梁面,由此形成四角稳定的支撑。
33.旋转台2设置在车体1的上部,其可带动第一升降机构3、水平机构4、第二升降机构5和作业平台6进行360
°
的旋转;第一升降机构3包括立柱31、滑动套32、第一升降丝杆驱动机构33,立柱31固定在旋转台2上,丝杆驱动机构33设置在立柱31的顶部,丝杆驱动机构33可驱动滑动套32沿着立柱上下运动;水平机构4固定连接在滑动套32上,水平机构4包括水平导轨41、水平滑块42、水平丝杆驱动机构43,水平丝杆驱动机构43驱动水平滑块42沿着水平导轨41进行水平往复运动;第二升降机构5固定连接在水平机构4的水平滑块42上,第二升降机构5包括第一升降架51、第二升降架52、第二升降丝杆驱动机构53,第一升降架51固定在水平滑块42上,第二升降丝杆驱动机构53固定在第一升降架51上,第二升降丝杆驱动机构53驱动第二升降架52沿着第一升降架51作滑动升降运动。
34.作业平台6可转动地设置在第二升降机构5的底部,作业平台6包括作业部61、转动部62、自平衡部63,作业部61和自平衡部63设置在转动部62的两侧,转动部62包括转动驱动机构(未图示)和回转支撑轴承621,在转动驱动机构的驱动下,作业部61和自平衡部63绕着回转支撑轴承621转动,作业人员站立在作业部61进行相关的作业,自平衡部63用于平衡作业部61和作业人员的重量,由此实现自平衡部63与作业部61和作业人员的平衡。
35.在作业平台6的作业部61上设置有围栏611以及均匀设置在作业部61底部多个压力传感器,多个压力传感器组成传感器阵列,根据作业人员脚下各个压力传感器检测到的数据,可以分析作业人员的人数、重量、位置,如传感器阵列检测到两个区域有重量,说明两个区域为一个工作人员的两个脚的站立位置;假定作业平台的较长方向称为水平方向;每个作业人员作业时的重量为gi,此时的gi不仅仅包括作业人员的自身重量还包括其作业过程中因作业活动而增加或是减少的总的重量,如托举检测设备或是安装其他工具、部件而产生的波动而形成的总的重量变化,该作业人员在水平方向上距回转支撑轴承621中心的水平距离为li,其中i表示第i个作业人员;作业部61自身重量为g0,作业部61自身重心距回
转支撑轴承621中心的水平距离为l0。
36.自平衡部63包含配重块a、配重块b、配重块c、配重驱动部分和配重控制系统,配重块a、配重块b、配重块c分别固定连接在输送机构a、输送机构b和输送机构c上,输送机构a、输送机构b和输送机构c的结构均相同,下面以输送机构a为例进行说明,输送机构a包括输送带a、从动辊和主动辊,主动辊通过带动输送带a进行转动,从而带动与输送带a固定连接的配重块a进行往复移动,主动辊包括磁感线圈、永磁部,其采用电磁感应驱动,且磁感线圈设置在输送机构a、输送机构b和输送机构c共用轴上,其运动通过磁感应线圈相连的导线并通过配重控制系统进行控制,由此实现集中安装,避免采用多个传动机构增大重量,减少占用体积。
37.假定配重块a的重量为ga,配重块b的重量为gb,配重块c的重量为gc。
38.控制方法具体为:
39.(1)初始状态时,为了使自平衡部63与作业部61自身重量平衡,配重块a距回转支撑轴承621中心的水平初始距离为la0,配重块b距回转支撑轴承621中心的水平初始距离为lb0,配重块c距回转支撑轴承621中心的水平初始距离为lc0。假定a、b、c三个配重块在移动时,距回转支撑轴承621中心的水平最大距离为l。当作业部61上有人员变化时,配重控制系统控制a、b、c三个配重块产生移动,假定a、b、c三个配重块相对初始位置向远离回转支撑轴承621中心方向移动的距离分别为
△
la、
△
lb、
△
lc,则a、b、c三个配重块相对初始位置向远离回转支撑轴承621中心方向移动的最大距离有
40.△
lamax=l-la0,
△
lbmax=l-lb0,
△
lcmax=l-lc0。
41.初始状态时,为了方便控制要求三个配重块la0=lb0=lc0。根据力矩平衡条件,初始状态时有
42.g0*l0=ga*la0 gb*lb0 gc*lc0
43.经计算得初始距离la0=lb0=lc0=g0*l0/(ga gb gc)。
44.(2)当多个压力传感器检测到有1个作业人员站到作业平台时,即i=1,该作业人员作业时的重量为g1,该作业人员在水平方向上距回转支撑轴承621中心的水平距离为l1。配重控制系统要求配重块a、c初始位置不动,配重块b移动,即
△
la=
△
lc=0。根据力矩平衡条件,此时有
45.g0*l0 g1*l1=
46.ga*la0 gb*lb0 gc*lc0 ga*
△
la gb*
△
lb gc*
△
lc
47.经计算得三个配重块向远离回转支撑轴承621中心方向移动的距离为
48.△
la=
△
lc=0,
49.△
lb=g1*l1/gb。
50.(3)当各个压力传感器检测到有2个作业人员站到作业平台时,即i=2,该作业人员作业时的重量分别为g1、g2,该作业人员在水平方向上距回转支撑轴承621中心的水平距离为l1、l2。配重控制系统要求配重块b初始位置不动,配重块a、c移动,且移动距离相等,即
△
lb=0,
△
la=
△
lc。根据力矩平衡条件,此时有
51.g0*l0 g1*l1 g2*l2=
52.ga*la0 gb*lb0 gc*lc0 ga*
△
la gb*
△
lb gc*
△
lc
53.经计算得三个配重块向远离回转支撑轴承621中心方向移动的距离为
54.△
la=
△
lc=(g1*l1 g2*l2)/(ga gc),
55.△
lb=0。
56.(4)当多个压力传感器检测到有3个作业人员站到作业平台时,即i=3,该作业人员作业时的重量分别为g1、g2、g3,该作业人员在水平方向上距回转支撑轴承621中心的水平距离为l1、l2、l3。配重控制系统要求配重块b移动到最大距离处,且配重块a、c移动距离相等,即
△
lb=
△
lbmax=l-lb0,
△
la=
△
lc。根据力矩平衡条件,此时有
57.g0*l0 g1*l1 g2*l2 g3*l3=
58.ga*la0 gb*lb0 gc*lc0 ga*
△
la gb*
△
lb gc*
△
lc
59.经计算得三个配重块向远离回转支撑轴承621中心方向移动的距离为
60.△
la=
△
lc=(g1*l1 g2*l2 g3*l3-gb*(l-lb0))/(ga gc),
61.△
lb=
△
lbmax=l-lb0。
62.(5)当多个压力传感器检测到有超过3个作业人员站到作业平台时,即i>3,系统报警提示超载。
63.由此,通过传感器阵列的实时检测,即可检测作业人员的数量、作业人员的重量或是作业人员作业时可进行动态的自平衡控制,从而减少作业人员的变动带来的不稳定情况,减少对回转支撑轴承等回转机构的破坏,从而保证作业人员的人身安全,减少事故的发生。
64.本发明可以控制在桥上进行作业,在作业时,作业平台可以从桥上移动到桥的侧面或底面。
65.显然,本发明的上述实施例仅仅是为清楚地说明本发明所作的举例,而并非是对本发明的实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明权利要求的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
