技术特征:
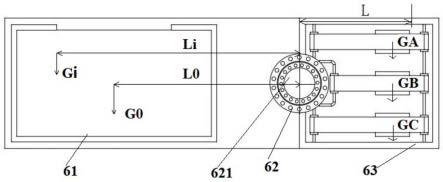
1.一种桥梁底面施工用自平衡作业车的控制方法,所述桥梁底面施工用自平衡作业车包括车体(1)、设置在车体(1)上的旋转台(2)、设置于旋转台(2)上的第一升降机构(3)、设置于第一升降机构(3)上的水平机构(4)、设置于水平机构(4)上的第二升降机构(5)、转动设置于第二升降机构(5)底部的作业平台(6),其特征在于:作业平台(6)包括作业部(61)、转动部(62)、自平衡部(63),转动部(62)包括转动驱动机构和回转支撑轴承(621),在作业平台(6)的作业部(61)上设置有围栏(611)以及均匀设置在作业部(61)底部多个压力传感器,多个压力传感器组成传感器阵列;每个作业人员作业时的重量为gi,作业人员距回转支撑轴承(621)中心的水平距离为li,其中i表示第i个作业人员;作业部(61)自身重量为g0,作业部(61)自身重心距回转支撑轴承(621)中心的水平距离为l0;自平衡部(63)包含配重块a、配重块b、配重块c、配重驱动部分和配重控制系统,配重块a、配重块b、配重块c分别固定连接在输送机构a、输送机构b和输送机构c上,配重块a的重量为ga,配重块b的重量为gb,配重块c的重量为gc;控制方法具体为:(1)初始状态时,配重块a距回转支撑轴承(621)中心的水平初始距离为la0,配重块b距回转支撑轴承(621)中心的水平初始距离为lb0,配重块c距回转支撑轴承(621)中心的水平初始距离为lc0,配重块a、配重块b、配重块c在移动时,距回转支撑轴承(621)中心的水平最大距离均为l;配重块a、配重块b、配重块c相对初始位置向远离回转支撑轴承(621)中心方向移动的距离分别为
△
la、
△
lb、
△
lc,则配重块a、配重块b、配重块c相对初始位置向远离回转支撑轴承(621)中心方向移动的最大距离
△
lamax=l-la0,
△
lbmax=l-lb0,
△
lcmax=l-lc0;初始状态时,la0=lb0=lc0=g0*l0/(ga gb gc);(2)当多个压力传感器检测到有1个作业人员站到作业平台时,即i=1,该作业人员作业时的重量为g1,作业人员在水平方向上距回转支撑轴承(621)中心的水平距离为l1,配重块a、配重块b、配重块c向远离回转支撑轴承(621)中心方向移动的距离为:
△
la=
△
lc=0,
△
lb=g1*l1/gb;(3)当多个压力传感器检测到有2个作业人员站到作业平台时,即i=2,作业人员作业时的重量分别为g1、g2,该作业人员在水平方向上距回转支撑轴承(621)中心的水平距离为l1、l2;配重块a、配重块b、配重块c向远离回转支撑轴承(621)中心方向移动的距离分别为:
△
la=
△
lc=(g1*l1 g2*l2)/(ga gc),
△
lb=0;(4)当多个压力传感器检测到有3个作业人员站到作业平台时,即i=3,作业人员作业时的重量分别为g1、g2、g3,该作业人员在水平方向上距回转支撑轴承(621)中心的水平距离为l1、l2、l3;配重块a、配重块b、配重块c向远离回转支撑轴承(621)中心方向移动的距离为:
△
la=
△
lc=(g1*l1 g2*l2 g3*l3-gb*(l-lb0))/(ga gc),
△
lb=
△
lbmax=l-lb0;(5)当多个压力传感器检测到有超过3个作业人员站到作业平台时,即i>3,系统报警提示超载。
技术总结
本发明提供一种桥梁底面施工用自平衡作业车的控制方法,其可在桥梁上进行作业,在作业时,作业平台可以从桥梁上移动到桥梁的侧面或底面;通过自平衡装置实现作业车中的作业平台的自平衡性能,根据实时判断作业平台上作业人员的数量以及作业时的重量,并根据总的重量适时调整自平衡部三个配重块的位置,进而实现实时动态的调整,从而稳定作业平台,减少对转动部结构的机械损伤,提高作业人员的安全性。提高作业人员的安全性。提高作业人员的安全性。
技术研发人员:谢君利 张军军 关迎 孔艳丽 席鹏超 鲁俊豪
受保护的技术使用者:黄河科技学院
技术研发日:2022.08.01
技术公布日:2022/11/15
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。