1.本发明涉及充磁技术领域,特别是一种环形磁栅尺同步充测设备及同步充测方法。
背景技术:
2.环形磁栅尺是环形磁编码器的重要组成部分,环形磁栅尺的充磁精度(包括每极的极宽和磁场强度)直接关系到环形磁编码器的使用精度。目前对于环形磁栅尺的充磁可参考专利cn211208135u-一种全自动磁环充磁设备,待充磁的环形磁栅尺沿周向逐极充入n、s极循环更替的多个磁极,当环形磁栅尺充磁完毕后,还需要对其进行检测,检测的内容包括充磁后环形磁栅尺每一极的极宽以及每一极的磁场强度,因此需要额外用到类似于专利cn215005828u-磁场中心检测仪这样的检测设备。由此可知,目前的充磁与检测异步的方案同时需要一台充磁设备和一台检测设备,设备成本高、占地空间也较大,且充磁与检测异步进行需要花费更多的时间,工作效率较低,同时检测前后的环形磁栅尺容易混杂。因此,亟需研发一种可对环形磁栅尺同步充测的设备以及同步充测的方法,以解决目前环形磁栅尺充磁、测量所存在的效率过低问题。
技术实现要素:
3.本发明的目的在于,提供一种环形磁栅尺同步充测设备及同步充测方法。本发明可对环形磁栅尺同步进行充磁和检测,工作效率高,设备成本低、占地面积小。
4.本发明的技术方案:一种环形磁栅尺同步充测设备,包括用于固定待充磁环形磁栅尺的旋转底座、位于待充磁环形磁栅尺上方且沿其所在圆周分布的充磁极头和测量探头;待充磁环形磁栅尺的一圈共计需要充入n、s极循环更替的m个磁极,m为2的正整数倍;待充磁环形磁栅尺单个n极或s极所对应的圆心角度数α为360
°
/m,所述充磁极头在旋转底座的旋转方向上依次分布有构成充磁极头极宽的第一极边和第二极边,测量探头靠近于第二极边,将测量探头视作一条直线,则第一极边、第二极边和测量探头所在直线的延长线均经过待充磁环形磁栅尺的中轴线;第一极边和第二极边之间形成的圆心角度数β小于360
°
/m;测量探头和第二极边之间形成的圆心角度数γ在(360
°
/m)-β至180
°
/m之间;或当测量探头转过角度360
°
/m的正整数倍后,其与第二极边之间形成的圆心角度数在(360
°
/m)-β至180
°
/m之间。
5.与现有技术相比,本发明同步充测设备的有益效果体现在:本发明通过将待充磁的环形磁栅尺固定于一个旋转底座上,在旋转底座固定产品位置的上方以一定的角度差沿产品所在的圆周设置充磁极头和测量探头,整个充磁和测量过程中环形磁栅尺随旋转底座共同旋转,而充磁极头和测量探头固定不动,通过控制充磁极头和测量探头各自的工作时间以实现环形磁栅尺旋转过程中,充磁极头和测量探头以一定的时序间歇地错开工作,充磁极头和测量探头互不影响彼此的工作,最后在环形磁栅尺旋转过程中同时完成充磁和检测,不仅提高了工作效率,还降低了设备的成本低以及设备的占地面积。
6.前述的环形磁栅尺同步充测设备中,第一极边和第二极边之间形成的圆心角度数β在240
°
/m至360
°
/m之间。
7.前述的环形磁栅尺同步充测设备包括总控制器,所述总控制器依次连接有充磁时序控制器和充磁极性控制器,总控制器经充磁时序控制器和充磁极性控制器连接充磁极头,用于控制充磁极头的充磁时间及充磁极性;所述总控制器还连接有测量时序控制器,总控制器经测量时序控制器连接测量探头,用于控制测量探头的测量时间,所述测量探头连接有测量数据采集器,测量数据采集器用于采集测量探头实时测得的磁场强度数据,测量数据采集器连接有上位计算机,上位计算机用于处理测量数据采集器传回的实时数据,根据这些数据计算充磁后环形磁栅尺每一极的极宽和磁场强度是否达标。
8.前述的一种环形磁栅尺同步充测设备的同步充测方法,包括以下步骤:
9.步骤一、保持旋转底座静止,在旋转底座上固定待充磁环形磁栅尺;
10.步骤二、控制旋转底座匀速旋转,旋转底座启动的同时控制充磁极头正向放电,充磁极头正向放电的时间小于旋转底座转过角度α-β所用的时间,当充磁极头断电后,单个n极或s极充磁完毕;
11.步骤三、从步骤二充磁极头开始放电计时,当旋转底座转过角度α-β的瞬间,控制测量探头工作,测量探头工作的时间等于旋转底座转过角度β所用的时间,当旋转底座转过角度β的瞬间,控制测量探头断电,记录下测量探头测得的磁场强度大小与时间之间的对应关系;
12.步骤四、当步骤三测量探头断电后,同时控制充磁极头反向放电,充磁极头反向放电的时间小于旋转底座转过角度α-β所用的时间,当充磁极头断电后,得到与步骤二磁性相反的单个磁极;
13.步骤五、从步骤四充磁极头开始放电计时,当旋转底座转过角度α-β的瞬间,控制测量探头工作,测量探头工作的时间等于旋转底座转过角度β所用的时间,当旋转底座转过角度β的瞬间,控制测量探头断电,记录下测量探头测得的磁场强度大小与时间之间的对应关系;
14.步骤六、重复步骤二至步骤五,直至m个磁极全部充磁及测量完毕;
15.步骤七、根据测量探头测得的总数据判断充磁后环形磁栅尺每一极的极宽和磁场强度是否达标,将达标的环形磁栅尺定为合格品,将不达标的环形磁栅尺定为不合格品。
16.前述的同步充测方法中,所述步骤一至步骤七循环进行实现环形磁栅尺的连续充测,当步骤七中产生不合格品时,停止同步充测设备的运行,对其进行检测和校准后再投入运行,可以有效避免连续地产生不合格品。
17.前述的同步充测方法中,步骤七中根据测量探头测得的相邻两次磁场强度为零的时间间隔、以及旋转底座匀速旋转的速度计算环形磁栅尺每一极的极宽,每一极的极宽均落入环形磁栅尺极宽的设定范围则表明环形磁栅尺每一极的极宽达标,若有一极的极宽不达标,则整个产品为不合格品。
18.前述的同步充测方法中,步骤七中根据测量探头每次测得的最大磁场强度值,将最大磁场强度值与环形磁栅尺磁场强度的设定阈值进行对比,每次测得的最大磁场强度值均大于设定阈值则表明环形磁栅尺每一极的磁场强度达标,若有一极的磁场强度不达标,则整个产品为不合格品。
19.与现有技术相比,本发明同步充测方法的有益效果体现在:本发明通过对充磁极头和测量探头工作时序的控制,实现了充磁时测量探头不工作,检测时充磁极头不工作,第一极边和第二极边之间形成的圆心角度数β在240
°
/m至360
°
/m之间,也即充磁极头的极宽大于环形磁栅尺单极极宽的三分之二,又设定了充磁极头通电时间小于旋转底座转过角度α-β所用的时间,这不仅使得充磁的时间会远远小于测量的时间,而且在每次充磁后至测量的期间会有一段时间间隙,这段时间间隙的存在保证了充磁极头不会影响到测量探头的工作。通过对充磁极头和测量探头之间夹角的设置,特别是对测量探头和充磁极头第二极边之间的角度进行了特殊设置,在特殊的角度设定下使得环形磁栅尺单极充磁完毕到旋转至下一个充磁起始位置期间,测量探头能检测到刚充磁完毕的环形磁栅尺单极的边界线(磁场强度为零的位置),同时还能检测到刚充磁完毕的磁栅尺单极的最大磁场强度,这个过程中旋转底座始终匀速旋转,不用停歇,最终做到旋转底座旋转过程中,整个环形磁栅尺完成充磁,同时每一极的极宽和最大磁场强度也检测完毕,可以判定充磁后的环形磁栅尺是否为合格品,一举两得,工作效率高。
附图说明
20.图1是本发明同步充测设备的结构示意简图;
21.图2是本发明同步充测设备的电路模块连接原理图;
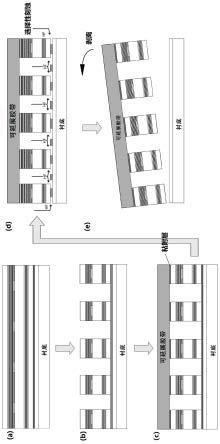
22.图3是实施例中利用本发明同步充测方法对六磁极环形磁栅尺进行同步充测的过程原理图;
23.图4是测量探头测得的磁场强度大小与环形磁栅尺转过角度之间的关系示意图。
24.附图标记:1-环形磁栅尺,2-旋转底座,3-充磁极头,4-测量探头,31-第一极边,32-第二极边,100-总控制器,200-充磁时序控制器,300-充磁极性控制器,400-测量时序控制器,500-测量数据采集器,600-上位计算机。
具体实施方式
25.下面结合附图和实施例对本发明作进一步的说明,但并不作为对本发明限制的依据。
26.实施例:一种环形磁栅尺同步充测设备,结构如图1所示,包括用于固定待充磁环形磁栅尺1的旋转底座2、位于待充磁环形磁栅尺1上方且沿其所在圆周分布的充磁极头3和测量探头4;待充磁环形磁栅尺1的一圈共计需要充入n、s极循环更替的m个磁极,m为2的正整数倍;待充磁环形磁栅尺1单个n极或s极所对应的圆心角度数α为360
°
/m,充磁极头3在旋转底座2的旋转方向上依次分布有构成充磁极头3极宽的第一极边31和第二极边32,测量探头4靠近于第二极边32,将测量探头4视作一条直线,则第一极边31、第二极边32和测量探头4所在直线的延长线均经过待充磁环形磁栅尺1的中轴线;第一极边31和第二极边32之间形成的圆心角度数β在240
°
/m至360
°
/m之间;测量探头4和第二极边32之间形成的圆心角度数γ在(360
°
/m)-β至180
°
/m之间。
27.当然,在实际应用中也可以设置成当测量探头4转过角度360
°
/m的正整数倍后,其与第二极边32之间形成的圆心角度数在(360
°
/m)-β至180
°
/m之间,区别在于:
28.测量探头4和第二极边32之间形成的圆心角度数γ在(360
°
/m)-β至180
°
/m之间
时,也即测量探头4和第二极边32的距离较近,当环形磁栅尺1的第一极充磁完毕后能马上进行测量工作,在环形磁栅尺1旋转360
°
β后,就能同时完成充磁和检测;之所以需要旋转一周加角度β后才能同时完成充磁和检测,是因为至少需要充两个磁极后才能检测到第一个磁场强度为零的位置,也即第一个磁极充磁完成后是检测不到其左边界的,只能检测到其右边界。
29.而当测量探头4转过角度360
°
/m的正整数倍后,其与第二极边32之间形成的圆心角度数在(360
°
/m)-β至180
°
/m之间时,也即测量探头4和第二极边32的距离较远,当环形磁栅尺1的第一极充磁完毕后不能马上进行测量工作,而是在环形磁栅尺1完成正整数极的充磁后,才能检测到第一极的充磁位置,因此,需要环形磁栅尺1旋转大于360
°
β后,才能同时完成充磁和检测,效率略低于测量探头4和第二极边32之间形成的圆心角度数γ在(360
°
/m)-β至180
°
/m之间时的方案,但是测量探头4可以获得足够大的安装空间。
30.同步充测设备还包括总控制器100,总控制器100依次连接有充磁时序控制器200和充磁极性控制器300,总控制器100经充磁时序控制器200和充磁极性控制器300连接充磁极头3,用于控制充磁极头3的充磁时间及充磁极性;总控制器100还连接有测量时序控制器400,总控制器100经测量时序控制器400连接测量探头4,用于控制测量探头4的测量时间,测量探头4连接有测量数据采集器500,测量数据采集器500用于采集测量探头4实时测得的磁场强度数据,测量数据采集器500连接有上位计算机600,可参考图2。
31.为了便于本发明同步充测方法的描述,本实施例中待充磁环形磁栅尺1的一圈共计需要充入n、s极循环更替的6个磁极(3个n极和3个s极),也即单个n极或s极所对应的圆心角度数α=60
°
;选择充磁极头3的极宽圆心角度数为50
°
,也即第一极边31和第二极边32之间形成的圆心角度数β=50
°
,将测量探头4和第二极边32之间形成的圆心角度数γ设为30
°
,可参考图1。
32.本发明的同步充测方法包括以下步骤,过程原理可参考图3:
33.步骤一、保持旋转底座2静止,在旋转底座2上固定待充磁环形磁栅尺1,可参考图3中的状态1,此时测量探头4和第二极边32之间形成的圆心角度数γ=30
°
。
34.由总控制器100协调控制充磁时序控制器200和测量时序控制器400,进而控制充磁极头3和测量探头4的工作时序。
35.步骤二、控制旋转底座2匀速旋转,旋转底座2启动的同时控制充磁极头3正向放电,充磁极头3正向放电的时间小于旋转底座2转过角度10
°
所用的时间,当充磁极头3断电后,单个n极(n1)充磁完毕,旋转底座2继续匀速旋转,直至转过总角度10
°
,参考图3中的状态2。
36.步骤三、从步骤二充磁极头3开始放电计时,当旋转底座2转过总角度10
°
的瞬间,控制测量探头4工作,测量探头4工作的时间等于旋转底座2转过角度50
°
所用的时间,也即当旋转底座2转过总角度60
°
的瞬间,控制测量探头4断电,记录下测量探头4测得的磁场强度大小与时间之间的对应关系,步骤三结束后如图3中的状态3所示,此时测量探头4已经测得磁极n1的最大磁场强度(但未测得磁极n1的左边界)。
37.步骤四、当步骤三测量探头4断电后,控制充磁极头3反向放电,充磁极头3反向放电的时间小于旋转底座2转过角度10
°
所用的时间,当充磁极头3断电后,得到与步骤二磁性相反的单个s极(s1),旋转底座2继续匀速旋转,直至转过总角度70
°
,参考图3中的状态4。
38.步骤五、当旋转底座2转过总角度70
°
的瞬间,控制测量探头4工作,测量探头4工作的时间等于旋转底座2转过角度50
°
所用的时间,也即当旋转底座2转过总角度120
°
的瞬间,控制测量探头4断电,记录下测量探头4测得的磁场强度大小与时间之间的对应关系,步骤五结束后如图3中的状态5所示,此时测量探头4已经测得磁极n1的右边界(也即磁极s1的左边界),以及磁极s1的最大磁场强度。
39.步骤六、重复步骤二至步骤五,直至6个磁极全部充磁及测量完毕;
40.具体如下(保持旋转底座2始终匀速旋转,旋转过的角度逐渐累加):
41.控制充磁极头3正向放电,充磁极头3正向放电的时间小于旋转底座2转过角度10
°
所用的时间,当充磁极头3断电后,磁极n2充磁完毕,旋转底座2继续匀速旋转,直至转过总角度130
°
,参考图3中的状态6;
42.当旋转底座2转过总角度130
°
的瞬间,控制测量探头4工作,测量探头4工作的时间等于旋转底座2转过角度50
°
所用的时间,也即当旋转底座2转过总角度180
°
的瞬间,控制测量探头4断电,记录下测量探头4测得的磁场强度大小与时间之间的对应关系,该步结束后如图3中的状态7所示,此时测量探头4已经测得磁极n2的左边界(也即磁极s1的右边界),以及磁极n2的最大磁场强度;
43.控制充磁极头3反向放电,充磁极头3反向放电的时间小于旋转底座2转过角度10
°
所用的时间,当充磁极头3断电后,磁极s2充磁完毕,旋转底座2继续匀速旋转,直至转过总角度190
°
,参考图3中的状态8;
44.当旋转底座2转过总角度190
°
的瞬间,控制测量探头4工作,测量探头4工作的时间等于旋转底座2转过角度50
°
所用的时间,也即当旋转底座2转过总角度240
°
的瞬间,控制测量探头4断电,记录下测量探头4测得的磁场强度大小与时间之间的对应关系,该步结束后如图3中的状态9所示,此时测量探头4已经测得磁极n2的右边界(也即磁极s2的左边界),以及磁极s2的最大磁场强度;
45.控制充磁极头3正向放电,充磁极头3正向放电的时间小于旋转底座2转过角度10
°
所用的时间,当充磁极头3断电后,磁极n3充磁完毕,旋转底座2继续匀速旋转,直至转过总角度250
°
,参考图3中的状态10;
46.当旋转底座2转过总角度250
°
的瞬间,控制测量探头4工作,测量探头4工作的时间等于旋转底座2转过角度50
°
所用的时间,也即当旋转底座2转过总角度300
°
的瞬间,控制测量探头4断电,记录下测量探头4测得的磁场强度大小与时间之间的对应关系,该步结束后如图3中的状态11所示,此时测量探头4已经测得磁极n3的左边界(也即磁极s2的右边界),以及磁极n3的最大磁场强度;
47.控制充磁极头3反向放电,充磁极头3反向放电的时间小于旋转底座2转过角度10
°
所用的时间,当充磁极头3断电后,磁极s3充磁完毕,旋转底座2继续匀速旋转,直至转过总角度310
°
,参考图3中的状态12;
48.当旋转底座2转过总角度310
°
的瞬间,控制测量探头4工作,测量探头4工作的时间等于旋转底座2转过角度50
°
所用的时间,也即当旋转底座2转过总角度360
°
(一周)的瞬间,控制测量探头4断电,记录下测量探头4测得的磁场强度大小与时间之间的对应关系,该步结束后如图3中的状态13所示,此时测量探头4已经测得磁极n3的右边界(也即磁极s3的左边界),以及磁极s3的最大磁场强度;
49.至此,还未测得磁极n1的左边界(也即磁极s3的右边界),在旋转底座2转过总角度360
°
的基础上,再匀速旋转角度β(50
°
),与此同时保持充磁极头3不工作、测量探头4工作,去测得磁极n1的左边界(也即磁极s3的右边界)。
50.至此,六个磁极n1、s1、n2、s2、n3、s3的磁极边界对应的时间点以及每个磁极的最大磁场强度都已测得。
51.步骤七、根据测量探头4测得的总数据判断充磁后环形磁栅尺1六极的极宽和磁场强度是否达标,将达标的环形磁栅尺1定为合格品,将不达标的环形磁栅尺1定为不合格品;
52.由测量数据采集器500采集测量探头4测得的相邻两次磁场强度为零的时间点,将磁场强度大小与时间之间的对应关系传至上位计算机600,上位计算机600根据相邻两次磁场强度为零的时间间隔以及旋转底座2匀速旋转的速度计算环形磁栅尺1每一极的极宽,六极的极宽均落入环形磁栅尺1极宽的设定范围则表明环形磁栅尺1的极宽达标,若有一极的极宽不达标,则整个产品为不合格品;
53.由测量数据采集器500将采集到的磁场强度大小与时间之间的对应关系传至上位计算机600,上位计算机600根据测量探头4每次测得的最大磁场强度值,将最大磁场强度值与环形磁栅尺1磁场强度的设定阈值进行对比,六次测得的最大磁场强度值均大于设定阈值则表明环形磁栅尺1的磁场强度达标,若有一极的磁场强度不达标,则整个产品为不合格品。
54.需要注意的是,图3仅仅是为了直观地呈现本发明同步充测过程原理示意图,在实际应用中,例如状态1至状态2过程中,当环形磁栅尺1完成磁极n1的充磁后,整个环形磁栅尺1都会带上n极的磁性,不存在边界(也即图3中各状态环形磁栅尺1的环身上都不应该存在有空白面积),为了便于同步充测原理的阐述,本发明的附图3仅对充磁极头3作用过的区域赋以极性(阴影面积),其他部位均用空白面积代替。
55.同时,为了便于附图3的理解,本发明新增了附图4,附图4为充磁与测量交替的时序图,用测量探头4测得的磁场强度大小与环形磁栅尺1转过角度来体现,图4中的p1点对应图3的状态1,此时充磁极头3开始对环形磁栅尺1进行充磁,充磁结束的时间为p1与p2之间的某一点,在p2点测量探头4开始测量,对应图3的状态2,p3点测量结束,p3点与p4点重合(实际应用中p3点可略早于p4点),在p4点开始新的一次充磁,对应图3的状态3;按以上规律重复充磁与测量,也即在p5点开始测量,对应图3的状态4,在p6点结束测量,在与p6点重合的p7点开始新的一次充磁,对应图3的状态5;在p8点开始测量,对应图3的状态6,在p9点结束测量,在与p9点重合的p10点开始新的一次充磁,对应图3的状态7;在p11点开始测量,对应图3的状态8,在p12点结束测量,在与p12点重合的p13点开始新的一次充磁,对应图3的状态9;在p14点开始测量,对应图3的状态10,在p15点结束测量,在与p15点重合的p16点开始新的一次充磁,对应图3的状态11;在p17点开始测量,对应图3的状态12,在p18点结束测量,对应图3的状态13;至此,环形磁栅尺1转过一周(360
°
),为了测量首极与尾极的交界线,保持充磁极头3不工作、测量探头4工作,环形磁栅尺1再匀速旋转角度β(50
°
),同时完成充磁与测量工作。
56.在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以
特定的方位构造和操作,因此不能理解为对本发明的限制。
57.以上仅是本发明的优选实施方式,本发明的保护范围并不仅仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。