1.本发明涉及神经外科护理技术领域,尤其涉及足内翻固定支具。
背景技术:
2.神经外科是主治由于外伤导致的脑部、脊髓等神经系统的疾病,例如脑出血出血量危及生命,车祸致脑部外伤,或脑部有肿瘤压迫需手术治疗等,这类患者的脑部神经通常会受到损伤,对身体其他部位的力量、协调性产生不利的影响,通常表现为患者身体偏瘫(其一侧肢体不受控制);
3.偏瘫患者通常伴随着足内翻的情况,因为脑出血或脑部受伤患者其脑部产生实质性损失,使牵张反射失去高级中枢的调整,进而使得肌张力失衡(肢体内外侧肌张力失衡而引起),加上偏瘫患者其一侧肢体无法得到充分锻炼而使得肌肉萎缩、肌肉筋膜产生牵拉等情况,从而进一步加重了足内翻的状况;
4.针对偏瘫患者在日常护理中需加强其偏瘫一侧肢体活动锻炼,比如拄着拐棍行走,依靠身体躯干的力量拖动其偏瘫一侧的肢体进而完成基本的行走锻炼(实现对偏瘫一侧肢体的训练,有助于尽可能多的恢复该侧肢体的功能),由于偏瘫患者伴随着足内翻的情况,进而通常会在行走锻炼过程中,在其偏瘫一侧的足部穿戴固定支具,避免行走过程中因足内翻而导致脚底部与地面接触不稳(脚部由抬起到触地时),足部力量失衡而导致重心不稳(摔倒);
5.现有的足部固定支具,通常使用绷带或者其他固定措施将患者有足内翻症状的脚相对于固定支具进行固定,而固定支具固定于患者的小腿部位,从而实现患者脚部相对于小腿不会产生内翻现象(行走锻炼时更加安全),采用上述固定支具在进行行走锻炼过程中,患者的脚部始终处于被勒紧状态(导致脚部肌肉因长时间受到较大压迫力而产生麻木、出现抽搐痉挛麻痹等现象),加之该侧肢体本来处于偏瘫状态,反而会影响该侧肢体运动协调功能的恢复,若不对患者脚部进行固定,又增加了患者在行走锻炼过程中的安全隐患;
6.鉴于以上我们提供足内翻固定支具用于解决以上问题。
技术实现要素:
7.本发明提供的足内翻固定支具,可根据患者行走过程中的节奏而相应的调整对其脚部的束缚程度,当患有足内翻症状的脚部已经站立在地面上时,稍微减少对脚部的束缚力,当患者患有足内翻症状的脚部抬起时,增大对脚部的束缚力,使得脚部肌肉不会始终处于被较大的束缚力所压迫状态,脚部落地时减少束缚力,脚部抬起时增大束缚力并且重复交替进行,也可实现对患者脚部一定程度的按摩效果。
8.足内翻固定支具,包括穿戴架且穿戴架包括一体设置的水平部、竖直部,其特征在于,处于所述水平部横向一侧的底壁上设有下沉腔且下沉腔上端设有硅胶垫,位于硅胶垫下方的下沉腔内纵向间隔设有若干与之竖向滑动安装且弹性连接的抵触板;
9.所述水平部上纵向间隔设有两与之竖向滑动安装的限位架且限位架内弧形面上
安装有足部气囊体,所述竖直部横向两侧设有腿部气囊体,所述下沉腔经气体装置分别与足部气囊体、腿部气囊体连接,气体装置、足部气囊体、腿部气囊体满足:当脚抬起时气体装置分别向足部气囊体、腿部气囊体内充气,当脚撑地时气体装置将足部气囊体、腿部气囊体中的气体抽出。
10.上述技术方案有益效果在于:
11.(1)本方案可根据患者行走过程中的节奏而相应的调整对其脚部的束缚程度,当患有足内翻症状的脚部已经站立在地面上时,稍微减少对脚部的束缚力(患者重量集中于该脚部,因受下压力使得脚部不会内翻),当患者患有足内翻症状的脚部抬起时,增大对脚部的束缚力(脚部处于悬空状态,以免因肌张力失衡而导致脚部不自主产生内翻),在确保行走过程安全的前提下,使得脚部肌肉不会始终处于被较大的束缚力所压迫,脚部落地时减少束缚力,脚部抬起时增大束缚力并且重复交替进行,也可实现对患者脚部一定程度的按摩效果;
12.(2)在本方案中,当患有足内翻的脚部抬起时,通过对患者小腿两侧施加不同大小的作用力(小腿外侧作用力大于内侧作用力),即实现了对患者小腿按摩,又可进一步阻止其脚部在抬起时不自主产生内翻(脚踝外部受到的作用力较大,抑制其脚踝向外部倾斜,从而也就抑制了足部向内侧翻的趋势);
13.(3)本方案中,通过设置硅胶垫、凹腔、按摩柱等结构,即可实现当患者脚部抬起时,利用负压的作用将患者脚底部吸在硅胶垫上(进一步抑制足部内侧上翘及脚踝部位外倾),还可实现对患者脚底部进行按摩的效果(起到放松脚底部肌肉,缓解疲劳的效果)。
附图说明
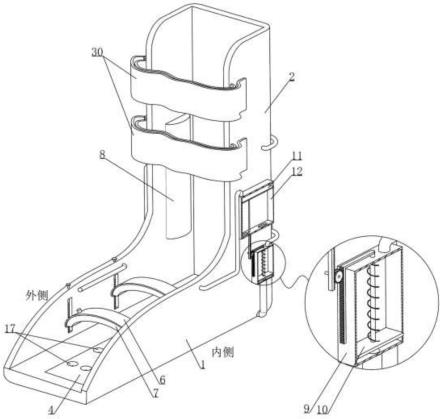
14.图1为本发明整体结前视构示意图;
15.图2为本发明整体结构后视示意图;
16.图3为本发明竖直部剖视后结构示意图;
17.图4为本发明水平部剖视后内部结构正视示意图;
18.图5为本发明排气管、排气孔、单向管连接关系示意图;
19.图6为本发明硅胶垫、若干抵触板、凹腔配合示意图;
20.图7为本发明硅胶垫未受压、受压时两种状态示意图;
21.图8为本发明过渡管、单向管、气压管连接关系示意图;
22.图9为本发明按摩柱、过渡管安装位置关系示意图;
23.图10为本发明足内翻患者、正常患者脚部形态示意图。
具体实施方式
24.有关本发明的前述及其他技术内容、特点与功效,在以下配合参考附图1至图10实施例的详细说明中,可清楚的呈现,以下实施例中所提到的结构内容,均是以说明书附图为参考。
25.实施例1,本实施例提供足内翻固定支具,如附图1所示,包括穿戴架(穿戴架包括一体设置的水平部1、竖直部2,由硬质且材料较轻的复合塑料加工),以实现对患者偏瘫一侧肢体(脚、小腿部位)进行较好限位的效果,避免其因偏瘫导致的肌张力失衡,使得患者在
进行行走锻炼过程中,其足部产生内翻(如附图10所示,具体表现为偏瘫一侧肢体足部内侧上翘,脚踝部位外倾),可在水平部1、竖直部2内侧与患者肢体接触部位覆盖有一层柔性材料(如海绵体、橡胶垫等),使得患者穿戴时具有一定的舒适度,在竖直部2两侧竖向间隔设有勒紧带30(勒紧带30自由一端经魔术贴粘接在竖直部2侧壁上),实现对患者小腿的限位效果;
26.当患者偏瘫一侧肢体脱离地面时,其因肌张力失衡而导致足部产生不自主内翻(足面内侧上翘、脚踝部位外倾,如附图10右侧视图所示),当患者足部以该种姿态触地时,极易因足底部与地面接触不稳,而导致重心失衡进而出现摔倒的情况(严重的会将脚踝部位扭伤,加重患者的痛苦);
27.本方案的改进之处在于:如附图4所示,在处于水平部1横向一侧的底壁上设有下沉腔3且下沉腔3上端设有硅胶垫4(硅胶垫4上端面与水平部1底壁保持平齐,硅胶垫4四周经高强度胶与下沉腔3侧壁粘接在一起),硅胶垫4与下沉腔3共同构成一个密封的腔体,在下沉腔3内竖向间隔设有若干抵触板5且抵触板5与下沉腔3之间连接有弹簧(抵触板5在弹簧作用下其上端面抵触于硅胶垫4下端面),如附图1所示,在水平部1上间隔设有两与水平部1侧壁竖向滑动安装的限位架6(水平部1上转动安装有与限位架6螺纹配合的丝杆33,通过转动丝杆33可调节限位架6的高度),在限位架6内弧形面上安装有足部气囊体7,在竖直部2两内侧壁上安装有腿部气囊体8,在水平部1两侧分别设有与下沉腔3连通的导气管34且导气管34连接有气体装置,气体装置分别与足部气囊体7、腿部气囊体8连通,该装置在具体使用时:
28.首先将患者偏瘫一侧小腿穿戴好该穿戴架,使得患者足部依次穿过两限位架6,然后将两勒紧带30将患者小腿勒紧实现限位,通过转动丝杆33控制两限位架6在竖向不同的高度(因为人体足部上面高度是不平的,表现为从足前到足后高度逐渐升高),故在调整两限位架6时,使得位于后方的限位架6高度适当高于前侧限位架6的高度,两限位架6下移的距离满足:限位架6下端面与足部上端面接触但不产生压力即可,本方案以患者右脚为足内翻为例针对本方案实施过程进行说明,故,在设置下沉腔3时,使得其位置设置在水平部1靠近内侧的位置(如附图1所示,本方案中的内侧、外侧是基于人体站立时的方位进行描述的,靠近人体中心的一侧称为内侧,远离人体中心的一侧称为外侧);
29.患者穿戴该固定支具后,即可进行行走锻炼,由于其一侧肢体不受控制(或者大脑控制该侧肢体的能力大大降低),在行走过程中,患者依靠其躯干的作用会拖动其偏瘫一侧的腿部向前移动,配合左侧肢体完成行走锻炼,当患者右脚未落在地面上时(处于悬空状态),硅胶垫4不受到压力且其上端面与水平部1底壁保持平齐(此时在气体装置的作用下将足部气囊体7、腿部气囊体8中充入一定量的空气并且膨胀),通过限位架6、足部气囊体7的配合,实现对患者足内翻的脚背部位施加的约束力进一步增大(以免该侧肢体处于悬空状态时,因肌张力失衡而导致足部产生不自主的内翻),通过腿部气囊体8、勒紧带30的配合实现对患者小腿部位的进一步限位,以确保患者该侧偏瘫肢体脚部在落地之前始终处于正确的位置姿态(以免该侧肢体在悬空时,因肌张力失衡不自主产生内翻,以至其落地时,与地面接触不稳,重心失衡而导致患者摔倒,给患者带来进一步损伤);
30.当患者该侧肢体落地时,其右脚会将硅胶垫4下压(迫使抵触板5压缩与之连接的弹簧并且向下移动,使得硅胶垫4产生凹陷)进而会将原本位于下沉腔3中的气体经导气管
34挤入至气体装置内并且带动气体装置动作,在气体装置的作用下会将原本处于足部气囊体7、腿部气囊体8中的空气向外排出,由于此时患者有足内翻症状的脚已经踩在地面上(在自身重力作用下,将足部紧紧压在地面),此时患者的足部内侧不会上翘并且脚踝外部也不会产生外倾(当有重力由上而下施加到肢体上时,脚部不会轻易内翻),从而实现确保患者偏瘫一侧脚部以正确的姿态触地并且在自身重力作用下紧紧的压在地面上,使得患者患有足内翻的脚由抬起到落地时不会出现如附图10中右侧视图所示的情形(避免患者以附图10中右侧视图中的姿势触地而导致与地面接触部均匀,使得患者摔倒);
31.上述过程为一个完整的行走过程,重复上述过程,即可实现对患者采取一定安全防护措施的情况下开展行走锻炼,而且在行走过程中,只有当患者偏瘫一侧的肢体抬起时对患者脚部进行较大程度的约束(以免该侧肢体悬空且不受外力作用时,因肌张力失衡而产生不自主内翻现象),上述状态持续保持到患有足内翻的足部触地后停止,当患者偏瘫一侧肢体触地时,减小对患者足部的约束力(使得患者偏瘫一侧的脚部不会始终处于较大约束力的作用),从而尽可能的减少因较大的约束力而导致有足内翻症状的脚部肌肉产生麻木或者抽搐、痉挛等现象(加重患者偏瘫一侧肢体的损害程度,不利于其恢复);
32.同时伴随着行走过程的进行,足部气囊体7、腿部气囊体8在气体装置的作用下,每隔一定时间调整对患者足部(脚背、小腿部位两侧)所施加的作用力(调整时间取决于患者行走的快慢),偏瘫一侧肢体抬起时施加的作用力较大,触地后施加的作用力较小,这种模式循环重复进行,相当于间接实现对患者脚背、小腿两侧部位进行按摩的效果(有助于在行走锻炼过程中对偏瘫一侧肢体的脚部、小腿部位肌肉进行一定程度的放松)。
33.实施例2,在实施例1的基础上,如附图1所示,气体装置包括安装在竖直部2横向两侧且均与下沉腔3连通的初级箱体9(初级箱体9底部经导气管34与下沉腔3连通,每个初级箱体9对应一个足部气囊体7),足部箱体12上端经管道分别和与之对应的足部气囊体7连通,在管道靠近与之对应的足部气囊体7一端经耐压软管与足部气囊体7连通(以配合限位架6的位置移动);
34.(1)如附图5所示,当患有足内翻的一侧的脚触地时(此时足部气囊体7、腿部气囊体8内充有一定量的气体),硅胶垫4受到压力并且传递到抵触板5上(如附图6所示,在下沉腔3内间隔设有多个抵触板5),进而会迫使抵触板5下移并且挤压与之连接的弹簧,最终使得硅胶垫4下凹(导致下沉腔3的体积减小),原本处于下沉腔3内的部分空气经导气管34被挤入至安装在竖直部2两侧的初级箱体9中,迫使竖向滑动安装在初级箱体9中的初级板10上移(初级板10与初级箱体9之间连接有弹簧),伴随着初级板10的上移则通过第一换向机构带动足部板11下移,如附图1所示,足部箱体12底部与外界连通,伴随着足部板11的下移则使得原本处于足部气囊体7中的气体被抽入至足部箱体12中(位于足部板11上方的足部箱体12空间内),在此过程中位于足部板11下方的空气经足部箱体12底部向外排出(此时足部气囊体7中的大部分气体向外抽出,足部气囊体7变的干瘪进而其对患者足部的约束力明显减小);
35.与上述过程同时进行的是:初级箱体9上端连通有腿部气动机构,伴随着初级板10在初级箱体9中上移,则将原本处于初级板10上方空间内的气体挤入至腿部气动机构并且通过腿部气动机构将原本处于腿部气囊体8中的气体向外抽出(使得腿部气囊体8变的较为干瘪,此时腿部气囊体8对患者的小腿约束力明显减小);
36.(2)当患者偏瘫一侧的脚部抬起时,其脚部对硅胶垫4的压力逐渐减小,直至完全离开地面后,硅胶垫4此时受到的压力最小,则若干抵触板5在与之连接弹簧作用下上移并且同步带动下凹的硅胶垫4向上撑起,则此时下沉腔3内产生一定程度的负压,则使得原本挤入至初级箱体9中的空气返流至下沉腔3中(初级板10在与之连接弹簧作用下同步下移),则通过第一换向机构带动足部板11上移,将位于足部板11上方空间的气体再次挤入至与之对应的足部气囊内(此时足部气囊再次膨胀),进而施加在患者足背上的约束力明显增加;
37.与上述过程同步进行的是:伴随着初级板10的下移,则将原本挤入至腿部气动机构中的气体返流至初级箱体9并且在腿部气动机构的作用下再次箱腿部气囊体8内充入气体,使得腿部气囊产生膨胀,以至硅胶垫4恢复至初始位置时,腿部气囊体8、足部气囊体7也同步膨胀至最大程度(此时施加在患者足部、小腿部位两侧的约束力明显增加),从而实现当患者偏瘫一侧肢体抬起时,对其进行较好的限位、固定效果(以免肢体抬起且不受外力约束的情况下,因肌张力失衡产生不自足的内翻现象),本方案中与抵触板5连接的弹簧的弹性系数大小选择,应当根据该装置所适用的人群来确定(不同年龄段的人群其体重大小不同,体重较大则选用弹性系数较大的弹簧,反之则选用弹性系数较小的弹簧,总之使得弹簧的选择能够匹配与其相适应的人体体重区间,进而来实现本方案所要达到的效果)。
38.实施例3,在实施例2的基础上,如附图2所示,腿部气动机构包括与两初级箱体9均连通的次级箱体13,次级箱体13内滑动安装有次级板14(次级板14与次级箱体13之间连接有弹簧),次级箱体13上端与外界连通,次级板14经第二换向机构驱动有两腿部板15且竖直部2侧壁上分别设有与腿部板15配合的腿部箱体16(腿部板15竖向滑动安装在腿部箱体16,腿部箱体16底壁与外界连通,腿部箱体16上端分别和与之对应的腿部气囊体8连通);
39.当患者偏瘫一侧肢体脚部触地时,则原本处于初级板10上方空间内的气体从初级箱体9中被挤入至次级箱体13(两初级箱体9中位于初级板10上方的空气均被挤入至次级箱体13中),会迫使次级板14在次级箱体13内上移(压缩与次级板14连接的弹簧),伴随着次级板14上移则同步第二换向机构同步带动腿部板15在腿部箱体16中下移,则实现将腿部气囊体8中的气体向外抽出并且抽入至腿部箱体16内(位于腿部板15上方空间内),此时两腿部气囊体8对患者小腿部位的约束力明显减小;
40.当患者偏瘫一侧肢体抬起时,在下沉腔3中产生一定程度负压,进而使得原本挤入至次级箱体13内的气体分别返流至两初级箱体9内(位于初级板10上方空间内的气体返流至下沉腔3),伴随着次级板14的下移则通过第二换向机构同步带动腿部板15在腿部箱体16内上移,则开始向腿部气囊体8中充气,以至脚部完全与地面脱离后,此时腿部气囊体8、足部气囊体7均膨胀至最大程度(此时腿部气囊体8、足部气囊体7对患者的约束力明显增大)。
41.实施例4,在实施例3的基础上,在设置的时候使得其中一腿部板15尺寸大于另一腿部板15(截面积大),由于本方案中以右侧肢体偏瘫为例说明,故,在设置的时候使得与外侧腿部气囊体8对应的腿部板15尺寸设置较大一些(另一腿部板15对应内侧腿部气囊体8),同样和处于外侧的腿部气囊体8所对应的腿部箱体16也设置的较大一些,本实施例中将两腿部气囊体8设置的位置靠下一些,使其与患者小腿靠近足部位置的肢体所对应;
42.当患者患有足内翻症状的脚从地面抬起时,通过初级箱体9、次级箱体13、第二换向机构的配合可同步带动两腿部板15在与之对应的腿部箱体16内上移,由于和处于外侧腿部气囊体8对应的腿部箱体16尺寸较大,进而每当两腿部板15上移同样距离时,被挤入至外
侧腿部气囊体8中的空气会多余安装在内侧的腿部气囊体8中空气,从而使得处于外侧的腿部气囊体8的膨胀程度大于内侧的腿部气囊体8,参照附图10所示,由于外侧的腿部气囊体8膨胀程度大于内侧的腿部气囊体8(患者足部脚踝位置受到来自外侧腿部气囊体8施加的约束力大于内侧腿部气囊体8施加的约束力),可较好的抑制当患者脚部抬起时,其脚踝部位因肌张力失衡而不自主的向外产生外倾,使得患者偏瘫一侧肢体在悬空状态时,能够始终保持正确的姿态,并且最终以该正确姿态进行触地(完成行走锻炼过程);
43.本方案中,初级板10、初级箱体9之间,足部板11、足部箱体12之间,次级板14、磁极箱体之间,腿部板15、腿部箱体16之间均设有橡胶密封圈以确保气密性,本实施中提供一种第一换向机构、第二换向机构的具体实施方式:如附图1所示,第一换向机构包括分别置于初级箱体9、足部箱体12外且与初级板10、足部板11连接的齿条(两齿条之间啮合有转动安装于竖直部2上的齿轮),如附图2所示,第二换向机构包括置于次级箱体13外且与次级板14连接的齿条,两腿部板15共同连接有u形杆(u形杆两悬臂分别与两腿部箱体16底壁滑动安装),u形杆其中一悬臂且置于腿部箱体16外一端设有若干齿系,若干齿系和齿条之间啮合有转动安装于竖直部2上的齿轮,第一、第二换向机构工作原理相同,均是通过齿轮、齿条传动实现换向效果(当然方案中的换向机构不局限于上述结构,只要能够实现同样的效果即可)。
44.实施例5,在实施例1的基础上,如附图4所示,在位于抵触板5正上方位置的硅胶垫4上端面均布设有若干凹腔17,凹腔17中心位置设有贯穿硅胶垫4的孔道18,如附图5所示,抵触板5上安装有与孔道18连通的单向管19(由l形管和设置于l形管上的单向阀组成),位于同一抵触板5上的若干单向管19共同连通有设于下沉腔3内的排气管20(若干单向管19经耐压软管和与之对应的排气管20连通)且排气管20连通有设于水平部1内的排气孔32(排气孔32与外界连通),当患者足部触地时,则足部对硅胶垫4上所施加的压力逐渐增大,以至足部完全站立在地面上(此时硅胶垫4受到足部的压力最大);
45.如附图7中上部视图所示,为患者脚部抬起时的凹腔17结构示意图(此时患者脚部几乎对硅胶垫4不产生压力,或者压力很小),此时凹腔17内充满空气,当患者脚部触地时,则在其自身重力作用下会将硅胶垫4不断被压缩(硅胶具有较好的张力、柔韧性、可压缩性),以至转变为附图7中下部视图所示状态,此时患者足底位置紧紧抵触在硅胶垫4上端面(凹腔17、患者足底面相配合构成一个相对密封的空间),由于硅胶垫4被挤压而产生收缩形变进而使得若干凹腔17的体积减小,在硅胶垫4由附图7中上部视图被挤压至成下部视图的过程中,凹腔17的体积不断减小,则将原本处于凹腔17内的空气经孔道18排入至与之连通的单向管19中并且最终汇聚到排气管20后经排气孔32向外排出(如附图5所示);
46.当患者该侧肢体抬起时,即,足部逐步脱离地面时,足部对硅胶垫4所施加的作用力同步减小,则硅胶垫4逐步恢复形变,若干凹腔17的体积也逐渐增大,由于原本位于凹腔17内的部分空气已经通过孔道18、单向管19、排气管20、排气孔32向外排出,故,会在凹腔17内产生一个相对的负压环境(外界气体无法通过排气孔32、排气管20、单向管19进入至凹腔17内)并且在外界大气压的作用下将患者的足部紧紧压在硅胶垫4上(实现了当患者脚部脱离地面时,对患者脚部的固定效果),与足部气囊体7、腿部气囊体8共同作用,实现对患者脚部脱离地面时更好的固定效果;
47.如附图6所示,本实施例中将抵触板5和硅胶垫4接触部位通过高强度胶水粘接在
一起,当患者脚部脱离地面时,若干抵触板5会随之同步上移以至上移至初始位置时无法继续上移(在下沉腔3两侧壁上分别设有与抵触板5两端竖向滑动安装的滑道,图中未标号,使得当足部完全脱离地面时,抵触板5在与之连接弹簧作用下上移至滑道顶端位置),此时在负压的作用下患者足底部与凹腔17对应位置被紧紧压在硅胶垫4上,而此时硅胶垫4与抵触板5粘接部位已无法继续上移,故,实现对患者足部进行限位的效果(使其紧紧的贴合于硅胶垫4,以免脱离地面时,产生如附图10中所示的足部内侧上翘现象);
48.如附图6所示,在硅胶垫4靠近内侧区域不设置凹腔17,因为人体足底面内侧在行走时距离地面间隔一定距离,即,当患者穿戴该设备行走时,足底面内侧不会压在硅胶垫上(进而也就无需设置额外的凹腔),当然患者足底面压在硅胶垫上时,也不代表所有设置在硅胶垫4上的凹腔17均能被压住(部分凹腔与患者足底面之间相抵触并且能构成一个相对密封的空间即可达到本方案中预设的效果);
49.注:本方案中患者在穿戴该固定支具进行锻炼时,其偏瘫一侧的脚部应处于裸露状态(无需穿袜子),使得其足部压在硅胶垫4上时,硅胶垫与患者足底面之间能够充分接触(硅胶垫上端面与足底面之间能够紧密贴合接触)并且与凹腔17构成一个相对密封的空间。
50.实施例6,在实施例1的基础上,如附图4所示,在设置的时候使得水平部1底壁设置呈斜面21,由于本方案中以患者右侧肢体未偏瘫一侧为例进说明,故将斜面21设置成外侧高,内侧低,参照附图10中右侧视图所示,当患者足部压在水平板上端面时,会使得患者足部有一个向内侧倾斜的趋势,从而平衡患者足底受力的情况(以实现抑制足面内侧上翘、脚踝部位外倾的效果);
51.如附图4所示,在设置的时候使得下沉腔3上端开口也同样设置成斜面21并且使得水平部1底壁坡度保持一致,当患者足部靠近内侧区域压在硅胶垫4上时,会使得硅胶垫4下凹,从而增大硅胶垫4区域范围内的斜面21坡度,使得患者靠近外侧足部所压的斜面21坡度小于患者靠近内侧足部所压的斜面21坡度,进一步抑制了足面内侧上翘、脚踝部位外倾。
52.实施例7,在实施例5的基础上,如附图9所示,孔道18与单向管19之间经过渡管22连通(过渡管22为硬质管道),在过渡管22内同轴心竖向滑动安装有按摩柱23(按摩柱23与过渡管22之间连接有弹簧,在过渡管22内沿其径向设有承载杆,使得按摩柱23滑动安装于承载杆上,承载杆的长度与过渡管22内径相同,宽度远小于过渡管22内径,承载杆图中示出未标号),弹簧一端连接在承载杆另一端固定于按摩柱23上,过渡管22一侧连通有气压管24(气压管24经耐压软管与排气管20连通,相对于位于气压板25背离按摩柱23一侧的空间内为标准大气压),气压管24内滑动安装有气压板25(气压板25与气压管24之间设有密封橡胶圈以确保气密性),气压板25、按摩柱23下端之间设有连杆26(连杆26两端分别与之转动连接),气压管24内径远小于过渡管22内径;
53.设定初始时,按摩柱23上端面与孔道18顶端平齐(未伸入至凹腔17内),当患者足部压在硅胶垫4上时,使得按摩柱23顶端不与患者足底面接触或者两者之间的作用力很小(在气压管24内设有与气压板25对应的限位块29,在自然状态时,气压板25抵触于限位块29上),当患者足部对硅胶垫4施加作用力逐步增大时,凹腔17内的部分空气经孔道18、过渡管22、单向管19向外排出(由于气压板25受到限位块29作用不会移动),当患者该侧肢体脱离地面时,凹腔17内产生一定程度的负压环境,此时气压板25内外产生气压差进而会迫使气压板25朝着靠近按摩柱23方向移动(连接于按摩柱23的弹簧被挤压),通过连杆26同步带动
按摩柱23上移并且使其上端面抵触于患者足底面(凹腔17内负压程度越大,按摩柱23抵触于足底面的抵触力越大),如附图6所示,硅胶垫4上局部设置的凹腔17可将患者足底面大部分区域覆盖,从而在若干按摩柱23的作用下,实现对患者足底面进行一定程度的按摩;
54.当患者该侧肢体开始触地时,则对硅胶垫4施加的压力逐渐增大,则凹腔17内的气压环境逐渐上升,在此过程中,凹腔17、过渡管22中的气压环境明显增大并且此时气压板25两侧的气压差明显减小,则按摩柱23在与之连接弹簧作用下同步下移(此时足底面也压在按摩柱23上端并且迫使按摩柱23下移),以至移动至初始位置(此时按摩柱23与患者足底面不接触),上述过程为一个完整的按摩周期。
55.实施例8,在实施例7的基础上,如附图9所示,为了使得按摩效果更佳,在过渡管22内壁与气压板25对应部位设有磁铁27,在气压板25面向磁铁27一侧设有铁片28;
56.初始时,气压板25距离磁铁27较远且两者之间的磁力较弱(忽略不计),当气压板25在气压差作用下朝着靠近按摩柱23方向移动时,使得铁片28、磁铁27之间的距离越来越小,以至近到一定程度时,在磁力的作用下会带动气压板25快速移动,同步带动按摩柱23快速上移进而在磁力加持作用下,按摩柱23与足底面之间的抵触力明显增大,对患者足底面的按摩、刺激效果更佳;
57.当患者该侧肢体开始触地时,则患者足底面会压着按摩柱23下移(同步迫使气压板25朝着远离磁铁27方向移动),伴随着过程的进行,则气压板25、磁铁27之间的磁力逐渐减弱,以至远离至一定程度时,气压板25、磁铁27之间的磁力大大减小(可忽略不计),以至完成复位,当患者足部触地时,按摩柱23与足底面不接触,当患者足部抬起时,按摩柱23上端抵触于足底面(上述过程中重复交替进行,对患者足底面按摩)。
58.注:方案中的耐压软管在图中均未示出。
59.上面只是为了说明本发明,应该理解为本发明并不局限于以上实施例,符合本发明思想的各种变通形式均在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。