技术特征:
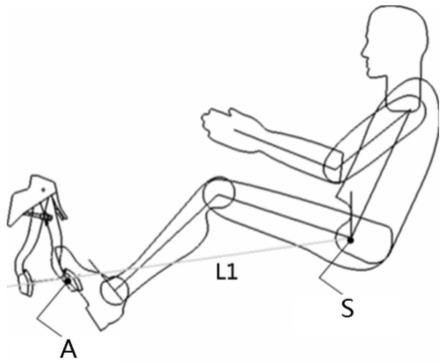
1.一种基于人机工程学的制动踏板轨迹布置方法,其特征在于:具体包括以下步骤:(1)绘制制动踏板旋转轨迹弦允许区间,旋转轨迹弦过初始位置制动踏板点b,驾驶员乘坐基准点s和初始位置油门踏板点a连线夹角在
±5°
以内,初定旋转轨迹弦与驾驶员乘坐基准点s和初始位置油门踏板点a连线平行;(2)通过踏板旋转轨迹弦两端点以任意半径画圆弧,这个圆弧的中心作为踏板旋转中心,初定圆弧半径可参考同平台车型,根据圆弧半径可推出制动踏板旋转中心,根据杠杆比可推出助力器推杆与踏板摆臂连接点旋转半径及旋转轨迹;(3)参考同平台车型,根据助力器及踏板支架布置要求,锁定助力器及踏板支架相对位置;(4)根据助力器推杆行程及极限摆动角要求,做出助力器推杆与踏板摆臂连接点旋转轨迹允许区间;(5)调整助力器及踏板支架布置位置,保证制动踏板支架能设计出踏板旋转中心结构,同时需保证助力器推杆与踏板摆臂连接点的全行程旋转轨迹位于允许区间内。2.根据权利要求1所述的基于人机工程学的制动踏板轨迹布置方法,其特征在于:具体包括以下步骤:(1)绘制过驾驶员乘坐基准点s和初始位置油门踏板点a的直线l1;(2)过初始位置制动踏板点b做两条线段l2和l3,与直线l1夹角为
±5°
,线段l2和l3夹角区域为制动踏板旋转轨迹弦的允许区间;过初始位置制动踏板点b做一条线段l0,与直线l1夹角为0
°
,线段l0为制动踏板点b的初定旋转轨迹弦;(3)绘制制动踏板点b的旋转轨迹弦l0的垂直平分线l4,以制动踏板点b为中心,以同平台车型制动踏板点旋转轨迹圆弧半径r为半径画圆弧l5,这个圆弧与旋转轨迹弦l0的垂直平分线的交点即为制动踏板旋转中心o,根据杠杆比i推出助力器b的推杆mn与踏板摆臂连接点n的旋转半径r及旋转轨迹l6;(4)根据助力器b及踏板支架c布置要求,设定助力器b的轴线l7与踏板支架c的轴线l8相合,设定助力器b与踏板支架c的轴向距离l9,锁定助力器及踏板支架相对位置;(5)助力器b与推杆mn的连接点m沿助力器b的轴线l7运动,且运动行程为l10,根据推杆mn长度及极限摆动角θ要求,可做出推杆mn与踏板摆臂b连接点n旋转轨迹允许区间1-2-3-4;(6)调整助力器b及踏板支架c布置位置,保证制动踏板支架c能设计出踏板旋转中心结构d,同时需保证推杆mn与踏板摆臂b连接点n的行程旋转轨迹l6位于允许区间1-2-3-4内。3.根据权利要求2所述的基于人机工程学的制动踏板轨迹布置方法,其特征在于:如通过调整助力器b及踏板支架c布置位置方案无法满足要求,调整制动踏板点旋转轨迹圆弧半径,重复上述布置方法。4.根据权利要求3所述的基于人机工程学的制动踏板轨迹布置方法,其特征在于:如通过调整制动踏板点旋转轨迹圆弧半径仍不可行,调整制动踏板旋转轨迹弦角度,重复上述布置方法,直至满足所有布置要求。5.根据权利要求4所述的基于人机工程学的制动踏板轨迹布置方法,其特征在于:调整制动踏板旋转轨迹弦角度具体方法为:在制动踏板旋转轨迹弦的允许区间,调整制动踏板旋转轨迹弦l0角度。
6.根据权利要求5所述的基于人机工程学的制动踏板轨迹布置方法,其特征在于:制动踏板旋转轨迹弦的允许区间为线段l2和l3夹角区域。7.根据权利要求2所述的基于人机工程学的制动踏板轨迹布置方法,其特征在于:所述l0、l2和l3的长度均为80mm。8.根据权利要求1或2所述的基于人机工程学的制动踏板轨迹布置方法,其特征在于:所述初始位置油门踏板点a为脚底离脚跟200mm距离的一个点。9.根据权利要求2所述的基于人机工程学的制动踏板轨迹布置方法,其特征在于:允许区间1-2-3-4中1点表示连接点m运动行程为l10、mn与轴线l7夹角θ/2的n点位置;2点表示连接点m运动行程为0、mn与轴线l7夹角-θ/2的n点位置;3点表示连接点m运动行程为0、mn与轴线l7夹角θ/2的n点位置;4点表示连接点m运动行程为0、mn与轴线l7夹角-θ/2的n点位置。
技术总结
本发明提出了一种基于人机工程学的制动踏板轨迹布置方法,属于汽车领域。解决了现有技术对制动踏板的布置方法,都是根据人体脚的位置设定制动踏板自由状态的中心点位置及踏板起始角度,并未明确制动踏板轨迹布置方法,尤其是基于人体坐姿发挥出最佳制动力的踏板轨迹,而且在制动踏板布置过程中未充分考虑杠杆比及助力器布置要求,容易出现布置反复问题,缺乏布置整体性的问题。本发明提出一种基于人机工程学的制动踏板轨迹布置方法,根据人体坐姿设定踏板轨迹区间,保证驾驶员在常规制动过程中发挥出最佳制动力,同时兼顾杠杆比及助力器布置要求,设定踏板最终轨迹,既满足结构又满足性能要求。构又满足性能要求。构又满足性能要求。
技术研发人员:张磊 赵斌 张华鹏 路胜利 张德亮 路国营
受保护的技术使用者:中国第一汽车股份有限公司
技术研发日:2022.07.27
技术公布日:2022/11/15
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。