1.本发明涉及浮游生物识别领域,特别是涉及一种原位图像中凝胶状浮游生物的目标提取方法及装置。
背景技术:
2.原位测量是指在不改变目标所处的原始环境的条件下、在原来的体系中对被测目标进行检测,而不是通过将待测目标分离出原有环境进行检测,这种方式可以最大限度地接近真实情况,从而得到尽可能准确的数据。因此,在浮游生物监测领域也倡导原位测量,而基于光学成像技术的水下原位光学成像仪是对浮游生物进行原位观测的最有效手段,较为有代表性的产品有zoovis(参见“trevorrow m v,mackas d l,benfield m c.comparison of multifrequency acoustic and in situ measurements of zooplankton abundances in knight inlet,british columbia[j].the journal of the acoustical society of america,2005,117(6):3574
–
3588.”)和planktonscope(拖拽式浮游生物成像仪)(参见“song j,bi h,cai z等.early warning of noctiluca scintillans blooms using in-situ plankton imaging system:an example from dapeng bay,p.r.china[j].ecological indicators,2020,112:106123.doi:10.1016/j.ecolind.2020.106123.”)。
[0003]
光学水下显微成像仪planktonscope结合了背影成像技术和双ccd(电荷耦合器件)成像技术,其拍摄的原位图像最高分辨率为2448
×
2050,具有大景深、高精度、低对比度的特点,最远成像距离达到米级别,成像尺度跨越微米和厘米级别,真实反映了一升体积范围的水体状况,大到数厘米的水母类浮游生物,小到数微米的桡足类浮游生物都能在原位图像中呈现。但是,由于海水中也包含了大量颗粒状、杆状、絮状悬浮物以及气泡等杂质,这些杂质会随同浮游生物一起被拍摄入原位图像中形成噪点,而受自然光照强度和成像仪下潜深度的影响,拍摄的原位图像时常会出现过暗的现象,这些情况都会给后期的目标提取带来挑战。此外,不同种类的浮游生物的成像特点也各不相同,因此目标提取方法很大程度上要因“类”而异。
[0004]
如图1a、1b、1c所示,凝胶状浮游生物如水母类和棕囊藻类的身体含水量高达98%以上,身体呈半透明状,反映在原位图像中的特点是灰度值与背景灰度值接近,且轮廓较为模糊,边缘连接较为微弱,容易与背景噪声粘黏,导致在目标检测阶段容易将目标边缘信息丢失,引起目标丢失和目标断裂的问题。
[0005]
需要说明的是,在上述背景技术部分公开的信息仅用于对本技术的背景的理解,因此可以包括不构成对本领域普通技术人员已知的现有技术的信息。
技术实现要素:
[0006]
本发明的目的在于解决凝胶状浮游生物在目标检测阶段易发生目标丢失和目标断裂的问题,提供一种原位图像中凝胶状浮游生物的目标提取方法及装置。
[0007]
本发明的技术问题通过以下的技术方案予以解决:
[0008]
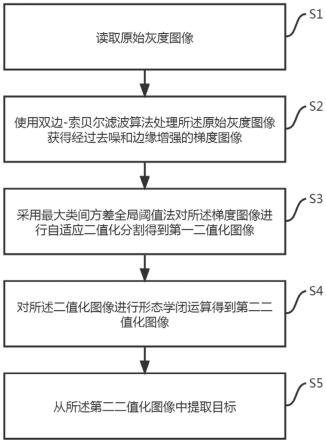
第一方面,本发明公开了一种原位图像中凝胶状浮游生物的目标提取方法,包括如下步骤:s1、读取原始灰度图像;s2、使用双边-索贝尔滤波算法处理所述原始灰度图像获得经过去噪和边缘增强的梯度图像;s3、采用最大类间方差全局阈值法对所述梯度图像进行自适应二值化分割得到第一二值化图像;s4、对所述二值化图像进行形态学闭运算得到第二二值化图像;s5、从所述第二二值化图像中提取目标。
[0009]
第二方面,本发明还公开了一种原位图像中凝胶状浮游生物的目标提取装置,包括:读取模块,用于读取原始灰度图像;滤波处理模块,用于使用双边-索贝尔滤波算法处理所述原始灰度图像获得经过去噪和边缘增强的梯度图像;二值化分割模块,用于采用最大类间方差全局阈值法对所述梯度图像进行自适应二值化分割得到第一二值化图像;形态学闭运算模块,用于对所述二值化图像进行形态学闭运算得到第二二值化图像;提取模块,用于从所述第二二值化图像中提取目标。
[0010]
第三方面,本发明还公开了一种计算机可读存储介质,存储有计算机程序,所述计算机程序由处理器执行时,实现第一方面所述的原位图像中凝胶状浮游生物的目标提取方法。
[0011]
本发明与现有技术对比的有益效果包括:
[0012]
本发明提出的原位图像中凝胶状浮游生物的目标提取方法,针对凝胶状浮游生物在原位图像中的特点采用双边-索贝尔滤波算法,双边-索贝尔滤波算法能在抑制浮游生物原位图像中噪点和背景的同时强化目标边缘信息,从而在浮游生物目标检测阶段减少目标与噪点以及背景粘黏而导致目标无法从背景噪声中分割出来的问题,以及减少因物体边缘信息丢失而导致目标被碎片化分割的问题,最大限度保证目标检出率和目标完整率,进而提升完整目标召回率。本发明提出的目标提取方法的目标检出率、目标完整率以及完整目标召回率高于已有的同类方法,是一种很有潜力的可用于提取原位图像中凝胶状浮游生物目标的方法。
附图说明
[0013]
图1a是现有技术拖曳式水下原位成像仪采集的水母类原位图;
[0014]
图1b是现有技术拖曳式水下原位成像仪采集的水母类原位图;
[0015]
图1c是现有技术拖曳式水下原位成像仪采集的棕囊藻类原位图;
[0016]
图2是本发明实施例1中原位图像中凝胶状浮游生物的目标提取方法流程图;
[0017]
图3a是比较例1中高斯滤波处理后对应的二值分割结果示意图;
[0018]
图3b是比较例1中高斯滤波处理后对应的目标检测结果示意图;
[0019]
图4a是比较例2中双边滤波处理后对应的二值分割结果示意图;
[0020]
图4b是比较例2中双边滤波处理后对应的目标检测结果示意图;
[0021]
图5a是比较例3中索贝尔滤波处理后对应的梯度灰度图;
[0022]
图5b是比较例3中索贝尔滤波处理后对应的二值分割结果示意图;
[0023]
图6a是本发明实验例中浮游生物的原位图;
[0024]
图6b是本发明实验例中索贝尔滤波处理后对应的梯度数值热图;
[0025]
图6c是本发明实验例中索贝尔滤波处理后对应的二值分割结果示意图;
[0026]
图6d是本发明实验例中双边滤波处理后对应的二值分割结果示意图;
[0027]
图6e是本发明实验例中双边滤波与索贝尔滤波结合处理后对应的梯度数值热图;
[0028]
图6f是本发明实验例中双边滤波与索贝尔滤波结合及二值分割后的目标提取结果示意图;
[0029]
图6g是本发明实验例中双边滤波与索贝尔滤波结合及二值分割后再经过形态学处理后的目标提取结果示意图;
[0030]
图7是本发明实验例中仅使用索贝尔滤波与使用双边滤波和索贝尔滤波结合得到的图像列向梯度均值对比图;
[0031]
图8是本发明实验例中仅使用索贝尔滤波与使用双边滤波和索贝尔滤波结合得到的图像梯度对比图;
[0032]
图9a是本发明实验例中高斯滤波和索贝尔滤波结合处理后对应的二值分割结果示意图;
[0033]
图9b是本发明实验例中高斯滤波和索贝尔滤波结合处理后对应的目标检测结果示意图;
[0034]
图9c是本发明实验例中双边滤波与索贝尔滤波结合处理后对应的二值分割结果示意图;
[0035]
图9d是本发明实验例中双边滤波与索贝尔滤波结合处理后对应的目标检测结果示意图。
具体实施方式
[0036]
下面对照附图并结合优选的实施方式对本发明作进一步说明。需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。
[0037]
本发明具体实施方式各实施例、比较例和实验例中所用的凝胶状浮游生物的原位图像是由国内研发人员开发的拖曳式水下原位成像仪planktonscope(参见“song j,bi h,cai z等.early warning of noctiluca scintillans blooms using in-situ plankton imaging system:an example from dapeng bay,p.r.china[j].ecological indicators,2020,112:106123.doi:10.1016/j.ecolind.2020.106123.”)于广东省阳江海域拍摄的。
[0038]
实施例1
[0039]
参考图2,本实施例提供一种原位图像中凝胶状浮游生物的目标提取方法,包括步骤如下:
[0040]
s1、读取原始灰度图像。
[0041]
s2、使用双边-索贝尔滤波算法处理原始灰度图像获得经过去噪和边缘增强的梯度图像。
[0042]
其中,双边-索贝尔滤波算法是指先采用双边滤波(bilateral filter)算法对所述原始灰度图像进行去噪,再使用索贝尔滤波算法对经过去噪后的图像进行边缘增强,得到所述梯度图像。双边滤波算法既考虑像素间的位置关系(空域信息),又考虑像素数值间的差异(值域信息),在平滑去噪的同时能最大限度地保护目标边缘灰度特性,能够有效地防止目标断裂的问题,之后再进行边缘增强能使边缘特征更为明显。
[0043]
具体地,双边滤波算法为:设双边核为k
×
k的二维矩阵b,其中k为奇数,以矩阵中
心点为原点(0,0),通过与原点的相对位置关系来描述矩阵上每个元素的坐标(x,y),x和y为在[-(k-1)/2,(k-1)/2]范围内的整数,各个坐标点的空域权重g
x,y
通过下式计算:
[0044][0045]
上式中:σg为正态分布方差,τg为权重系数,所述权重系数τg调节各空域权重g
x,y
的大小使其之和满足σg
x,y
=1;
[0046]
各坐标点在值域上的权重值与所覆盖的区域像素值有关,设图像像素值矩阵为i,双边核在图像上滑动,当双边核的中心点所对应的图像像素坐标为(u,v)时,值域权重w
x,y,u,v
和双边核的权重值b
x,y,u,v
分别通过下式计算:
[0047][0048]bx,y,u,v
=g
x,ywx,y,u,v
[0049]
其中i
u x,v y
为坐标(u x,v y)对应的图像像素值,i
u,v
为坐标(u,v)对应的图像像素值,σw为正态分布方差,τw为权重系数,所述权重系数τw调节各值域权重w
x,y,u,v
的大小使其之和满足∑w
x,y,u,v
=1,双边核的权重值b
x,y,u,v
为空域权重g
x,y
和值域权重w
x,y,u,v
的乘积。由式可知,当双边核在处理目标边缘时,邻域像素值与中心像素值差异较大,其对应的值域权重w
x,y,u,v
就相应减小,由此削弱邻域像素对边缘像素值的影响,达到保边的效果。
[0050]
在物体边缘,像素值一般会发生较大的变化,如果对图像进行求导,物体边缘的导数值将比其他区域要大,索贝尔梯度算子可用于计算像素边缘的导数值,具体地,索贝尔滤波算法为:在x方向和y方向的索贝尔模板分别为d
x
和dy,使用模板d
x
在对应的图像区域上进行加权求和运算,得到区域中心像素在水平方向上的梯度s
x
,使用模板dy在对应的图像区域上进行加权求和运算,得到区域中心像素在竖直方向上的梯度sy,根据矢量运算可得到对应像素的梯度大小s
x,y
:
[0051][0052][0053]
s3、采用最大类间方差(otsu)全局阈值法对所述梯度图像进行自适应二值化分割得到第一二值化图像。
[0054]
其中,最大类间方差全局阈值法具有一定的抗噪能力且效率较高,并且比常用的聚类方法和局部阈值法计算量少,具体地,最大类间方差全局阈值法基于类间方差最大的思想从统计的角度出发计算全局阈值t0:
[0055]
[0056][0057]
其中,σ2为类间方差;t为取值范围为0到255之间全部整数的一个变量;m、n分别为步骤s2得到的梯度图像的宽度、高度;n
(t)
为步骤s2得到的梯度图像中灰度值小于当前t值的像素个数;gi为灰度值小于当前t值的像素的灰度值;gj为灰度值大于或等于当前t值的像素的灰度值。该otsu全局阈值法的具体运算流程是:变量t依次取遍0到255的全部整数,每个t值处都计算一次类间方差σ2,随着t值的变化会计算256次类间方差,取类间方差最大时的t值作为最终的全局阈值t0。
[0058]
s4、对所述二值化图像进行形态学闭运算得到第二二值化图像。
[0059]
其中,形态学闭运算既能够填充目标物孔洞、去除部分噪音又不会破坏目标区域形状,具体地,形态学闭运算采用的结构元是一个13*13大小,锚点位于中心的矩形结构元。
[0060]
s5、将目标从第二二值化图像中提取出来。
[0061]
针对由于水下成像条件的不理想,原位图像中往往会有大量噪声,而凝胶状浮游生物的成像特点如轮廓模糊、边缘连接微弱等使得目标检测阶段易发生目标丢失和目标断裂的问题,本实施例提出的双边-索贝尔滤波算法能在抑制浮游生物原位图中的噪点和背景的同时,强化浮游生物原位图像中的目标边缘信息,从而在浮游生物目标检测阶段减少目标与噪点以及背景粘黏而导致目标无法从背景噪声中分割出来的问题,以及减少因物体边缘信息丢失而导致目标被碎片化分割的问题,提升目标检出率和目标完整率,进而提升完整目标召回率。
[0062]
比较例1
[0063]
原位图像中包含大量颗粒状、杆状、絮状悬浮物以及气泡等杂质,需要对其进行去噪处理,以减小杂质对后续浮游生物目标检测和识别过程的影响。使用高斯核模板在对应的图像区域上进行加权求和计算,从而消除噪点,尽可能减少在对浮游生物原位图像进行边缘检测操作时因噪点过多而出现浮游生物边缘与背景杂质粘黏的情况。该比较例1采用高斯滤波算法替代双边-索贝尔滤波算法来处理原始灰度图像,具体地,高斯滤波算法为:
[0064]
设高斯核为k
×
k的二维矩阵g(k为奇数),以矩阵中心点为原点(0,0),通过与原点的相对位置关系来描述矩阵上每个元素的坐标(x,y),x和y为在[-(k-1)/2,(k-1)/2]范围内的整数,各个坐标点所对应的权重值g
x,y
的计算表达式如下所示,坐标越靠近矩阵中心,模板上相应的权重值也越大。使用高斯核在图像上滑动,将权重值与所覆盖的区域内对应的像素相乘再求和,计算结果即为对应的中心像素点进行高斯平滑后的值。
[0065][0066]
上式中:σg为正态分布方差,τg为权重系数,所述权重系数τg调节各权重值g
x,y
的大小使其之和满足σg
x,y
=1。
[0067]
该比较例1中,高斯滤波在平滑噪点的同时也会使得浮游生物边缘模糊,而凝胶状浮游生物身体呈半透明状,在原位图像中呈现的边缘十分纤细,因此使用高斯滤波很容易
将这类浮游生物的边缘信息破坏掉,造成目标断裂的问题,如图3a、3b所示,图3a为高斯滤波后的二值化结果,白色部分是目标,黑色部分是背景,而轮廓提取算法是基于连通域的思想,只有当目标的最外层边缘保持完整无缺时,才能将目标完整地提取出来,但是如图3a所示的圆圈部分明显可以看出本应该是连在一起的目标边缘断裂了;也正因为二值化图像中目标的最外层边缘就是断裂的,所以进行轮廓提取时易将一个目标分成多个目标,图3b显示一个目标被两个轮廓提取框标注出来了。
[0068]
比较例2
[0069]
该比较例2采用双边滤波算法替代双边-索贝尔滤波算法来处理原始灰度图像。如图4a、4b所示分别为双边滤波处理后对应的二值分割结果和目标检测结果。
[0070]
与比较例1相比,由于双边核在处理目标边缘时,邻域像素值与中心像素值差异较大,其对应的值域权重w
x,y,u,v
就相应减小,由此削弱邻域像素对边缘像素值的影响,达到保边的效果。而由于双边核在图像上每滑动一步,就需要重新计算和更新权重值,双边滤波处理一张分辨率为2180
×
1635的浮游生物原位图的平均耗时为125ms,相对于比较例1的高斯滤波(平均耗时56ms)的处理速度较慢。
[0071]
比较例3
[0072]
该比较例3采用索贝尔滤波算法替代双边-索贝尔滤波算法来处理原始灰度图像得到梯度图像,如图5a所示,然后使用如实施例1所述的步骤s3的otsu全局阈值法对梯度图进行自适应阈值二值化分割,得到目标分割结果,如图5b所示,由图可知,通过索贝尔滤波处理后,浮游生物目标的边缘信息得到较好保存,但是噪声也被增强了,这会导致目标检测时目标检出率和目标完整率下降。
[0073]
实验例
[0074]
以水母类凝胶状浮游生物为例,其原位图如图6a所示,通过实施例1和各个比较例的方法分别进行目标提取,其实验过程和结果如下:
[0075]
对于比较例3中的索贝尔滤波算法:由于待测目标的边缘通常与周边像素的差异值较大,也就是梯度值较大,因此使用索贝尔滤波计算梯度值常用作边缘增强的一种手段。但是如图6a所示的浮游生物原位图中含有大量杂质和噪点,这些杂质和噪点虽然肉眼看上去不明显,但其与周边像素值的差异较大,相应的梯度值也较大,图6b是直接对原位图进行索贝尔滤波计算得到的梯度数值可视化热图,可以看到噪点的梯度值与浮游生物目标边缘梯度值接近,导致目标与噪点粘黏在一起,在直接对梯度图像进行二值分割时就难以将目标从中分离出来,如图6c所示。
[0076]
对于比较例2中的双边滤波算法:尽管双边滤波能够平滑噪点,且具有较好的保边特性,但当浮游生物边缘灰度值与背景灰度值差异较小时,直接对双边滤波后的图像进行二值分割的话背景无法得到抑制,导致目标与背景粘黏在一起,进而导致目标与背景一同被分割出来,如图6d所示。
[0077]
对于实施例1中的双边-索贝尔滤波算法:采用双边-索贝尔滤波算法,即先使用双边滤波算法对噪点进行平滑处理,消除噪点像素与周边像素的差异,再使用索贝尔滤波进行边缘梯度计算,得到相应的梯度图像。将该梯度图像的数值可视化热图(图6e)与图6b对比发现,噪点和背景的梯度值被抑制,不与目标粘黏,同时目标边缘信息得到增强。图7分别统计了使用双边-索贝尔滤波算法与单独使用索贝尔滤波算法计算得到的图像像素在列向
对应的梯度均值,单独使用索贝尔滤波计算出的图像梯度均值为38.39,进行双边滤波保边去噪后使用索贝尔滤波计算出的图像梯度均值降低至10.07,背景和噪点梯度得到有效抑制。因此再对经过实施例1的双边-索贝尔滤波后得到的梯度图像进行二值化分割可以将浮游生物目标尽可能完整地提取出来,但索贝尔滤波的边缘增强效果是有限的,还是可能发生边缘断裂的情况,进而导致目标提取时一个目标被多个轮廓提取框标记,如图6f所示。而考虑到形态学闭运算具有既能够填充目标物孔洞、去除部分噪音又不会破坏目标区域形状的特点,因此,本发明实施例1在对双边-索贝尔滤波得到的梯度图像二值化后继续进行一次形态学闭运算,使得断裂的边缘尽可能连接起来又不至于破坏目标形状,之后就能完整地将目标提取出来,如图6g所示。
[0078]
为验证本发明使用的双边-索贝尔滤波算法的有效性,以在目标提取前未使用任何滤波,仅使用最大类间方差(otsu)全局阈值法以及形态学闭运算为基准参照,其目标检出率和目标完整率分别为56.50%和89.21%。
[0079]
分别在otsu全局阈值法之前加入以下5种处理方式:索贝尔滤波(sobel)、高斯滤波(gaussian)、双边滤波(bilateral)、高斯滤波与索贝尔滤波结合(gaussian-sobel)、双边滤波与索贝尔滤波结合(bilateral-sobel),分别统计五种方法对应的目标检出率(提取出的目标个数
÷
实际的目标总个数),以及提取出的目标完整率(提取出的完整目标个数
÷
提取出的目标个数),并计算出完整目标召回率(提取出的完整目标个数
÷
实际的目标总个数)。实验结果如表1所示。
[0080]
表1五种滤波方法对浮游生物目标检出效果的影响对比
[0081][0082]
由上表结果可知,使用bilateral-sobel滤波算法对浮游生物原位图进行处理后,目标检出率和目标完整率均得到大幅提升,分别为95.93%和98.73%,完整目标召回率达到最高的94.71%。图8分别统计了209张原位图单独使用索贝尔滤波以及使用双边-索贝尔滤波算法计算得到的图像梯度均值,在单独使用索贝尔滤波时计算出的平均每张原位图的梯度均值为32.93,使用bilateral-sobel方法进行保边去噪和边缘增强之后,平均每张图像的梯度均值下降至8.80,背景和噪点的梯度得到有效抑制。
[0083]
对实验结果进行分析,若只使用sobel滤波进行预处理,会由于噪声过多而导致目
标检测失效,目标检出率(21.54%)和目标完整率(79.25%)大幅下降。使用gaussian-sobel处理方法的目标检出率(96.34%)略高于使用bilateral-sobel处理方法的目标检出率(95.93%),但由于gaussian滤波对边缘具有一定破坏性,导致目标分割碎片化,如图9a、9b所示,而bilateral滤波具有较强的噪点平滑能力的同时,也能够保持边缘的梯度,从而保证了目标分割的完整性,如图9c、9d所示,因此前者的目标完整率(87.34%)比后者(98.73%)要低得多。
[0084]
通过本方明具体实施方式,能在去噪的同时强化目标边缘,从而有效地提升凝胶状浮游生物的目标检出率和目标完整率,对实时监测凝胶状浮游生物的分布,分析其生活习性,建立凝胶状浮游生物的监测和预警系统有重要意义。例如,一些工厂或公共设施(例如核电站)需要将经过处理的热水排放至海水中,而某些凝胶状浮游生物(例如水母)喜欢在较为温暖的水域生活,这种生活习性会使其往排水口附近聚集,一旦数量过多就会导致水管堵塞,进而导致一系列的连锁反应甚至是安全隐患,因此在建立完善的凝胶状浮游生物监测和预警系统时,本发明就非常适用于系统中的目标提取环节。
[0085]
本发明具体实施方式还提供一种原位图像中凝胶状浮游生物的目标提取装置,包括:读取模块,用于读取原始灰度图像;滤波处理模块,用于使用双边-索贝尔滤波算法处理所述原始灰度图像获得经过去噪和边缘增强的梯度图像;二值化分割模块,用于采用最大类间方差全局阈值法对所述梯度图像进行自适应二值化分割得到第一二值化图像;形态学闭运算模块,用于对所述二值化图像进行形态学闭运算得到第二二值化图像;提取模块,用于从所述第二二值化图像中提取目标。
[0086]
本发明具体实施方式还提供了一种计算机可读存储介质,存储有计算机程序,所述计算机程序由处理器执行时,实现第一方面所述的原位图像中凝胶状浮游生物的目标提取方法。
[0087]
本领域技术人员应明白,本发明的实施例可提供为方法、系统、或计算机程序产品。因此,本发明可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实施例的形式。而且,本发明可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器、cd-rom、光学存储器等)上实施的计算机程序产品的形式。
[0088]
本发明是参照根据本发明实施例的方法、设备(系统)、和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。
[0089]
这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。
[0090]
这些计算机程序指令也可装载到计算机或其他可编程数据处理设备上,使得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或
其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。
[0091]
以上内容是结合具体/优选的实施方式对本发明所作的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。对于本发明所属技术领域的普通技术人员来说,在不脱离本发明构思的前提下,其还可以对这些已描述的实施方式做出若干替代或变型,而这些替代或变型方式都应当视为属于本发明的保护范围。在本说明书的描述中,参考术语“一种实施例”、“一些实施例”、“优选实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。尽管已经详细描述了本发明的实施例及其优点,但应当理解,在不脱离专利申请的保护范围的情况下,可以在本文中进行各种改变、替换和变更。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。