1.本发明涉及智能车辆导航技术领域,具体为一种基于机器视觉的道内车辆探测方法。
背景技术:
2.自主导航车辆在道路行驶时,不但要通过机器视觉识别车道线,而且还要识别前方车辆是否在本车道内以及左右偏移情况,以便进一步判断其行驶意图(变道或直行)。关于道内车辆探测方法,目前工程上较为常见的是直接通过激光雷达进行探测。该方法通过安装在后车的激光雷达探测前车相对于后车的几何位置,再结合已知的车道宽度,可以较为容易地判断出前车是否在车道内。但是该方法有一定的局限性。该方法在直道上使用较为可靠,但是在一些特殊情况下,如弯道或双侧不平行道路,将会无法正常工作。
技术实现要素:
3.(一)解决的技术问题针对现有技术的不足,本发明提供了一种基于机器视觉的道内车辆探测方法,具备能够有效检测出前方弯道或双侧不平行道路内的车辆是否与后车处于同一车道。若处于同一车道,计算前车的道内偏移情况,解决了在一些特殊情况下,如弯道或双侧不平行道路,激光雷达无法正常工作的问题。
4.(二)技术方案为实现上述目的,本发明提供如下技术方案:一种基于机器视觉的道内车辆探测方法,该方法包括:(一)判断前车与后车是否在同一车道内,包括:图像采集:通过安装在后车车头正前方的双目摄像头采集前方道路及车辆的图像;图像处理:通过模式识别算法对图像进行处理,识别出左右车道线及前方车辆;计算形心:计算出图像中左右车道线的形心和前方车辆的形心的图像坐标;建立空间坐标:通过双目摄像头的立体视觉功能,将图像中左右车道线的形心和前方车辆形心的图像坐标转换为对应的空间坐标;坐标投影:将左右车道线的形心和前方车辆形心的空间坐标向xoy平面投影;车道二次曲线拟合:对左右车道线形心投影分别用二次曲线进行拟合;确定坐标点:在xoy平面上,过前方车辆形心向x轴作垂线,确定垂线与两条二次曲线的交点;车辆位置计算:利用确定的坐标点,测算前车与后车的车道关系;(二)计算前车的道内偏移情况,包括:旋转垂线:将垂线以前方车辆形心为中心进行旋转;斜率二次曲线拟合:在旋转过程中,分别计算前方车辆形心与左右车道二次曲线
交点的距离并组成序列,对序列中的距离与对应的斜率进行二次曲线拟合;测算道内偏移距离:分别采用一阶导数等于0的方法得到前方车辆距离左右车道线的最小距离;得出道内偏移情况:最小距离反映前方车辆的道内偏移情况。
5.优选的,所述建立空间坐标中,空间坐标原点在后车车头中心,水平向右为x轴正方向,水平向前为y轴正方向,垂直向上为z轴正方向。
6.优选的,所述坐标投影中,得到左侧车道线形心的投影为{ln}={l1,l2,l3…
ln}、右侧车道线形心的投影为{rn}={r1,r2,r3…rn
}和前方车辆形心的投影为p0(x0, y0),其中,n表示识别到的车道线数量。
7.优选的,所述车道二次曲线拟合中,对左侧车道线形心投影{ln}用二次曲线进行拟合,得到拟合曲线为 ,对右侧车道线形心投影{rn}用二次曲线进行拟合,得到拟合曲线为
ꢀꢀ
。
8.优选的,所述确定坐标点中,在xoy平面上,过p0点作x轴的垂线与 相交于p1(x0,y1)点,与
ꢀꢀ
相交于p2(x0,y2)点,即y1=f1(x0),y2=f2(x0)。
9.优选的,所述车辆位置计算中,若(y
0-y1)(y
0-y2)《0,则说明p0点位于两条曲线之间,前车与后车属于同一车道,反之则说明p0点位于两条曲线之外,前车与后车属于不同车道。
10.优选的,所述旋转连线中,将直线p1p2以p0为旋转中心每隔x度进行旋转,旋转后的直线与两条车道曲线相交。
11.优选的,所述斜率二次曲线拟合中,在旋转过程中,计算p0p1的距离和p0p2的距离,组成序列{dln}和{drn},n表示元素个数,分别对序列{dln}和{drn}的最小值及其前m和后m组距离数据与其对应的p0p1和p0p2的斜率进行二次曲线拟合,得到距离d与斜率k关系曲线dl=f
l
(k)和dr=fr(k)。
12.优选的,所述测算道内偏移距离中,采用一阶导数等于0的方式得到曲线dl=f
l
(k)和dr=fr(k)的极小值,该极小值为p0l0和p0r0,即为前方车辆距离左右车道线的最小距离。
13.优选的,所述x的取值范围为0.1~1.0度,m的取值范围为20~40之间。
14.(三)有益效果与现有技术相比,本发明提供了一种基于机器视觉的道内车辆探测方法,具备以下有益效果:该基于机器视觉的道内车辆探测方法,能够以机器视觉的方式探测前方车辆是否与后方车辆在同一车道内,若处于同一车道,能够快速计算其道内偏移情况。以数学方法替换昂贵的激光检测设备,具有较高的精度和可靠性。
附图说明
15.图1为本发明的结构示意图。
具体实施方式
16.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完
整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
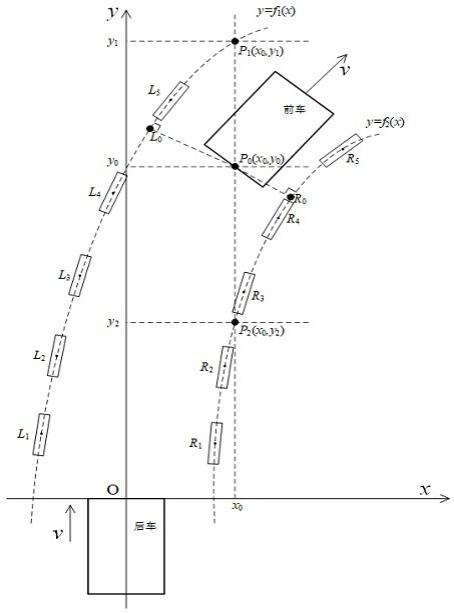
17.参阅图1,该方法包括:(一)判断前车与后车是否在同一车道内,包括:图像采集:通过安装在后车车头正前方的双目摄像头采集前方道路及车辆的图像;一般选择基线大于等于20cm的双目摄像头,这样才能保证其量程较大,符合无人驾驶场景需求;图像处理:通过模式识别算法对图像进行处理,识别出左右车道线及前方车辆;可以采用常见的yolo算法进行识别,也可以采用其他常见算法,算法的实时性要高,要有较快地识别速度;计算形心:计算出图像中左右车道线的形心和前方车辆的形心的图像坐标;由于是从后方拍摄,前方车辆只拍摄到车尾,只需提取车尾的形心坐标即可;建立空间坐标:通过双目摄像头的立体视觉功能,将图像中左右车道线的形心和前方车辆形心的图像坐标转换为对应的空间坐标;此处空间坐标为三维坐标。空间坐标原点在后车车头中心,水平向右为x轴正方向,水平向前为y轴正方向,垂直向上为z轴正方向;坐标投影:将左右车道线的形心和前方车辆形心的空间坐标向xoy平面投影;车道二次曲线拟合:对左右车道线形心投影分别用二次曲线进行拟合;在视觉测量的范围内道路是平滑的,不可能任意弯曲,因此二次曲线可以很好地拟合;确定坐标点:过前方车辆形心向x轴作垂线,确定垂线与两条二次曲线的交点;车辆位置计算:利用确定的坐标点,测算前车与后车的车道关系;(二)计算前车的道内偏移情况,包括:旋转垂线:将垂线以前方车辆形心为中心进行旋转;斜率二次曲线拟合:在旋转过程中,分别计算前方车辆形心与左右车道二次曲线交点的距离并组成序列,对序列中的距离与对应的斜率进行二次曲线拟合;测算道内偏移距离:采用二次函数求极值原理,分别令曲线的一阶导数等于0,得到前方车辆距离左右车道线的最小距离;得出道内偏移情况:最小距离反映前方车辆的道内偏移情况。
18.本实施例中,具体的,建立空间坐标中,空间坐标原点在后车车头中心,水平向右为x轴正方向,水平向前为y轴正方向,垂直向上为z轴正方向。
19.本实施例中,具体的,坐标投影中,得到左侧车道线形心的投影为{ln}={l1,l2,l3…
ln}、右侧车道线形心的投影为{rn}={r1,r2,r3…rn
}和前方车辆形心的投影为p0(x0, y0),其中,n表示识别到的车道线数量。
20.本实施例中,具体的,车道二次曲线拟合中,对左侧车道线形心投影{ln}用二次曲线进行拟合,得到拟合曲线为 ,对右侧车道线形心投影{rn}用二次曲线进行拟合,得到拟合曲线为 。
21.本实施例中,具体的,确定坐标点中,在xoy平面上,过p0点作x轴的垂线与
ꢀꢀ
相交于p1(x0,y1)点,与 相交于p2(x0,y2)点,即y1=f1(x0),y2=f2(x0)。
22.本实施例中,具体的,车辆位置计算中,若(y
0-y1)(y
0-y2)《0,则说明p0点位于两条曲线之间,前车与后车属于同一车道,反之则说明p0点位于两条曲线之外,前车与后车属于不同车道。
23.本实施例中,具体的,旋转连线中,将直线p1p2以p0为旋转中心每隔x度进行旋转,旋转后的直线与两条车道曲线相交。
24.本实施例中,具体的,斜率二次曲线拟合中,在旋转过程中,计算p0p1的距离和p0p2的距离,组成序列{dln}和{drn},n表示元素个数,分别对序列{dln}和{drn}的最小值及其前m和后m组距离数据与其对应的p0p1和p0p2的斜率进行二次曲线拟合,得到距离d与斜率k关系曲线dl=f
l
(k)和dr=fr(k)。
25.本实施例中,具体的,测算道内偏移距离中,采用一阶导数等于0的方式得到曲线dl=f
l
(k)和dr=fr(k)的极小值,该极小值为p0l0和p0r0,即为前方车辆距离左右车道线的最小距离。
26.本实施例中,具体的,x的取值范围为0.1~1.0度,m的取值范围为20~40之间,x取值越小,数据量越大,但是精度越高,一般建议x取0.5度;m建议取值30,既能够保证精度,又有较小计算量。
27.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。