1.本发明属于土木工程的振动控制领域,具体涉及一种半主动可复位双势阱减振装置,主要用于基础设施结构和建筑结构等的振动控制。
技术背景
2.结构振动控制技术在建筑结构的抗震、抗风中发挥着重要的作用,其中调谐质量控制技术发展较为成熟,因其概念简单、机理明确、对原结构改动小等优点而成熟应用于工程实践中。然而,受到传统调谐质量控制技术力学原理的限制,其恢复力与振子位移呈线性关系,导致其只能在共振区附近的很小一段特定频率范围内具有良好的减振效果,对于偏离这一范围的频率其减振效果不佳,且对工作环境变化敏感。为此,学者们提出了非线性能量阱技术以降低振动信号处理器对激振频率的敏感性。非线性能量阱作为一种新兴的结构振动控制技术,其恢复力与振子位移呈非线性关系,因此相比传统调谐质量控制技术具有较宽的减振频带。此外,非线性能量阱因其非恒定的非线性刚度而具有靶向能量传递机制,可以快速传递结构振动能量至减振系统中并耗散,是一种鲁棒性较高的振动控制技术。
3.非线性能量阱预先设定的刚度一般基于其在特定外界激励下发生靶向能量传递时的最优理论刚度值,然而因非线性能量阱的能量鲁棒性稍差,使得不同初始振动条件下非线性能量阱的最优刚度不尽相同,导致不同类型激励及激励幅值下非线性能量阱的减振效果可能与预期不大一致。同时,为解决传统非线性能量阱因较高的启动阈值导致振动前期减振效果不明显的问题,学者们将双稳态的概念引入非线性能量阱,使其具有对称的两个势能阱,从而构造出前期启动速度较快的双势阱。然而,传统双势阱的振子在振动结束后一定会停留在其中一个势能阱的稳态平衡位置,导致双势阱在下一次振动时无法具有快速启动的特性,也与双势阱最初的计算模型不符合。
技术实现要素:
4.本发明的目的就是为了解决上述问题至少其一而提供一种半主动可复位双势阱减振装置,通过构造双势阱使系统在振动初期即获得较好的振动控制效果,且通过对空气弹簧非线性刚度的调控极大地拓宽了减振系统的控制激励频带,同时在振子结束振动后通过振动信号处理器和空气泵将振子复位,使得系统符合理论计算模型,保证控制系统具有较高的振动控制效果。
5.为实现上述目的,本发明采用下述技术方案:
6.本发明是一种半主动可复位双势阱减振装置,主要包括振子、滑轨、底板、空气弹簧、销轴、支架、螺栓、气体导管、空气泵、三通管道连接件、振动信号处理器和信号输出线。其中,振子与滑轨紧密连接,滑轨焊接固定在底板上。空气弹簧通过销轴与振子垂直连接,且空气弹簧通过销轴与支架连接并通过螺栓固定在底板上。空气弹簧的充气口通过气体导管与空气泵连接,且气体导管连接到三通管道连接件上便于空气泵的充气与抽气。振动信号处理器通过信号输出线控制空气泵的工作状态。
7.本发明中,振子的主体是一个质量块箱体,质量块箱体顶部有盖板防止质量块脱离振子,且盖板上有螺栓孔用于与空气泵连接,质量块箱体底部有半圆柱及圆柱形凸出块体与滑轨连接。
8.本发明中,滑轨的轨道凹槽与振子下部的凸出块体吻合,以此保证振子在滑轨上稳定滑行。
9.本发明中,底板具有2个螺纹孔,底板通过螺栓与支架连接固定。
10.本发明中,空气弹簧的充气口用于提高空气弹簧的内部压强,抽气口用于降低空气弹簧的内部压强,且活塞杆的一端与振子上的销轴进行铰接,空气弹簧的另一端与支架的销轴进行铰接。
11.本发明中,支架的销轴高度与空气弹簧的销轴相匹配,且设置有加劲肋以提高支架的抗侧刚度,支架通过螺栓固接在底板上。
12.本发明中,空气泵具有充气口和抽气口用于控制空气弹簧的内部压强,空气泵使用螺栓通过底座上的螺栓孔固定在振子的盖板上。
13.本发明中,三通管道连接件用于将两根气体导管同时连接到空气泵中,保证可以同时调节两个空气弹簧的内部压强。
14.所述的振动信号处理器集成有传感设备,用于实时收集并识别振子的频率并判断其是否处于最优频率范围内,其指令通过信号输出线控制空气泵在振动控制系统安装时、工作时以及工作完成后的工作状态,使其提高、维持或降低空气弹簧的内部压强,以此给系统提供自复位功能,并达到对减振系统非线性刚度的调控。具体的,传感设备集成在振动信号处理器中,即信号收集器。由于信号收集器在所有时段都在实时收集系统的振动信号,所以主体结构在静止时所收集处理得到的振动频率即可认为是主体结构的自振频率,因此这里仅需用一个传感器收集振子的振动信号。
15.本发明中,所述的振动信号处理器利用傅里叶变换识别出系统的振动频率,并判断该频率是否偏离最优频率范围5%以上,若偏离最优频率区间则发出指令,使空气泵调整空气弹簧的内部压强,使得系统频率处于最优频率区间内,进一步提高系统的振动控制效果。
16.本发明中,所述的振动信号处理器,进一步的:收集并使用傅里叶变换识别振子在环境激励下的振动状态及频率,并判断其是否停止振动以及自身频率是否等于预设频率,若系统停止振动,则将驱使空气泵将空气弹簧内部形成负压强,从而使空气弹簧形成拉力而将振子复位,当振子复位后再继续收集并识别振子在环境激励下的频率并判断其是否等于预设频率,如果与预设频率不一致则调整系统频率至预设频率。此时空气弹簧内部压强稍大于大气压强,空气弹簧内为正压强,则构造了具有快速启动能力的双势阱,使控制系统在主体结构发生下一次振动时具有较好的初始振动控制效果。
17.与现有技术相比,本发明的优点如下:
18.1)本发明的空气弹簧具有强非线性特性,进一步提高双势阱系统的非线性程度,使减振系统获得更宽的减振频带并显著降低振子的工作行程,降低系统对激励频率的敏感性;
19.2)本发明可以实时收集和识别振子的振动频率,并判断振子频率是否处于最优频率范围内,若偏离最优频率区间则可以调整系统频率至最优频率区间内,进一步提高减振
系统的振动控制效果;
20.3)本发明可以实时收集并识别振子的振动状态及频率,并判断振子是否停止振动以及自身频率是否等于预设频率,系统停止振动后可以调控空气泵将空气弹簧内部形成负压强从而将振子复位,同时调整系统频率至预设频率,使振子即便停止振动后依旧可以复位和调整频率,以此保证控制系统在主体结构发生下一次振动时具有较好的初始振动控制效果。
21.综上所述,本发明的创新性主要体现在两点:一方面,可以实时收集并判断和调整系统的频率,使系统的控制效果进一步提高;另一方面,所提出的一种半主动可复位双势阱减振装置可以在振子停止振动后将其复位,同时调整系统频率至预设频率,使其在主体结构发生下一次振动时具有较好的初始振动控制效果。具体的,振动信号处理器在振子停止振动后收集和傅里叶变换识别出振子在环境激励下的频率,首先驱动空气弹簧将振子复位,然后调整空气弹簧内部压强至双势阱的压强,使得控制系统在结构发生下一次振动时有较好的初始振动控制效果。
附图说明
22.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍。
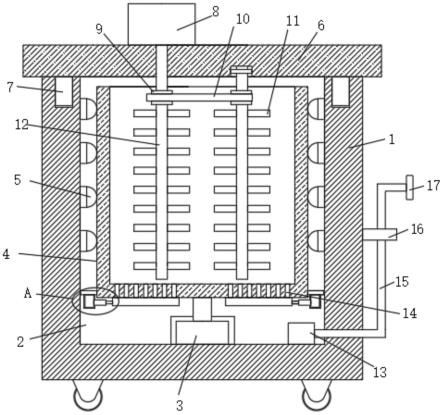
23.图1为半主动可复位双势阱减振装置示意图;
24.图2为振子示意图;
25.图3为滑轨示意图;
26.图4为空气弹簧俯视图;
27.图5为空气弹簧正视图;
28.图6为空气弹簧a-a剖面图;
29.图7为空气泵俯视图;
30.图8为空气泵正视图;
31.图9为支架示意图;
32.图10为振动信号处理器内部构造示意图;
33.图11为振动信号处理器和空气泵的工作流程图;
34.图中:
35.1为振子,1-1为质量块箱体,1-2为盖板,1-3为凸出块体;
36.2为滑轨;3为底板;
37.4为空气弹簧,4-1为空气弹簧充气口,4-2空气弹簧为抽气口,4-3为活塞杆;
38.5为销轴;
39.6为支架,6-1为加劲肋;7为螺栓;
40.8为气体导管;9为空气泵,9-1为空气泵充气口,9-2为空气泵抽气口,9-3为底座;10为三通管道连接件;
41.11为振动信号处理器,11-1为信号收集器,11-2为信号传输线,11-3为信号处理器,11-4为信号转换器;12为信号输出线。
具体实施方式
42.本发明针对双势阱的非线性刚度难以调控及振子振动后无法复位的问题,提出了一种半主动可复位双势阱减振装置。该半主动可复位双势阱减振装置的振动信号处理器可以实时收集振子的振动信号并识别其振动频率,并且可以实时或被动地调节非线性能量阱的频率,因此,该半主动可复位双势阱减振装置随外界激励的变化在两级控制机制之间灵活转换。具体而言:1)当减振系统启动时,振动信号处理器可以实时收集并识别振子的频率并判断是否处于最优频率范围内,如果系统频率偏离最优频率范围,则调整系统频率至最优频率区间内,否则继续收集并识别振子的振动信号。如此,节省控制装置(空气泵)的工作功率,对于非线性振动而言也不需实时调整系统自身的频率,因此第一个控制策略为实时收集系统的振动信号并识别出振子频率,仅当振子振动频率超过预设的最优频率范围时才启动空气泵调整空气弹簧的刚度。
43.2)当减振系统停止时,振动信号处理器可以驱使空气泵将空气弹簧内部形成负压强,从而使空气弹簧形成拉力而将振子复位,当振子复位后再收集并识别振子在环境激励下的频率并判断其是否等于预设频率,如果与预设频率不一致则调整系统频率至预设频率,否则继续收集并识别振子的振动信号。此第二点是系统的自复位机制。首先需要判断出振子停止,然后发出指令让空气泵将空气弹簧内部压强抽成负压,使得弹簧回拉至原始平衡点,且由于空气弹簧是对称布置的所以振子箱体两端的拉力刚好抵消了;然后振动信号处理器的信号收集器收集振子在环境激励下的振动信号,并且用傅里叶变换识别出振子此时的系统频率(该频率肯定偏离预设的振子频率),以此计算得到空气弹簧的内部压强调控值,调整系统频率至双势阱的预设频率。
44.本发明提出的半主动可复位双势阱减振装置的创新性主要体现在以下三点:
45.1)使用振动信号处理器可以实时收集振子的振动信号并识别其振动频率,并对空气弹簧的气压进行实时或被动调节,使系统的工作频率保持在最优频率区间内,保证控制系统在特定激励频率下具有较高的振动控制效果;
46.2)振动信号处理器可以在减振系统停止工作后驱使空气泵和空气弹簧将振子复位,同时识别振子在环境激励下的振动频率,调控系统频率至预设频率,保证控制系统符合计算力学模型,使其在主体结构发生下一次振动时具有较好的初始振动控制效果;
47.3)半主动可复位双势阱减振装置在振动初期即具有较好的控制效果,其具有可调控的非恒定固有频率,其可以与结构的一系列模态发生共振,从而极大地拓宽了减振系统的控制频带,同时其强非线性可以降低振子的工作行程,弥补了传统调谐质量控制技术的减振频带单一和和空间局限性缺陷。
48.下面结合附图详细说明本发明的具体实施方式:
49.如图所示,本发明为一种半主动可复位双势阱减振装置,主要包括振子1、滑轨2、底板3、空气弹簧4、销轴5、支架6、螺栓7、气体导管8、空气泵9、三通管道连接件10、振动信号处理器11和信号输出线12。
50.系统安装:
51.将滑轨2和支架6装配于底板3,再将振子1卡入滑轨2中并将其移动至预先设定的空气弹簧4平衡位置,接着将气弹簧安装在振子1与支架6中间,再通过气体导管8和三通管道连接件10连接空气泵9,最后安装振动信号处理器11并通过信号输出线12连接空气泵9。
52.系统安装完成后,如图11所示,振动信号处理器11中的信号收集器11-1收集系统的振动信号,通过内部的信号传输线11-2将收集到的振动信号传递至信号处理器11-3,信号处理器11-3在设定时间内收集到足够信号后对信号进行傅里叶变化从而获得系统的振动频率,同时信号处理器11-3判断振子1的频率是否等于预设频率,一旦偏离预设频率范围,则通过信号传输线11-2将此时系统的主振动频率输送给信号转换器11-4,通过信号转换器11-4将所需要调控的目标频率转换为所需要调节的空气弹簧4内部压强值,再通过信号输出线12驱动空气泵9调控空气弹簧4的内部压强至预设压强,保证减振系统的振动频带与设计值相符。
53.在地震和风荷载激励下,半主动可复位双势阱减振装置开始工作,将主结构的能量传递捕获至阻尼系统并在系统内耗散。振子1的运动带动空气弹簧4的内部气体受压或受拉,空气弹簧4自身的非线性进一步提高了双势阱的几何非线性,使控制系统具有较宽的减振频带;同时,由于构造了双势阱,振子1在振动初期即可以快速启动,使得主结构开始振动时就具有较好的初始振动控制效果。振子1运动过程中,振动信号处理器11的信号收集器11-1实时收集振动信号并传递至内置的信号处理器11-3识别系统的振动频率,判断振子1的频率是否处于最优频率范围内,当系统频率偏离最优频率5%以上时,信号转换器11-4将所需要调控的目标频率转换为所需要调节的空气弹簧4内部压强值,通过信号输出线12将指令发送至空气泵9,通过空气泵9调整空气弹簧4的内部压强,使系统频率保持在最优频率区间内,保证系统具有较优的减振控制效果。
54.当主体结构停止振动后,在环境激励下,半主动非线性能量阱减振系统开始工作。此时振动信号处理器11的信号收集器11-1仍在收集系统的振动信号,当信号处理器11-3进行傅里叶变化所获得系统的振动频率在一定次数内仍处于相同数值且信号峰值较小时,信号处理器11-3判断此时系统已停止振动,通过内置信号传输线11-2将指令输送至信号转换器11-4,驱使空气泵9将空气弹簧4内部形成负压强,从而使空气弹簧4形成拉力而将振子1复位。振子1复位后,振动信号处理器11的信号收集器11-1仍收集振子在环境激励下的振动信号并传递至信号处理器11-3识别其振动频率,判断该频率是否等于系统的预设频率,如果偏离预设频率则通过信号转换器11-4将所需要调控的目标频率转换为所需要调节的空气弹簧4内部压强值,并通过信号输出线12将指令输送至空气泵9调整空气弹簧4的刚度,使系统频率等于构造双势阱的预设频率,保证控制系统在主体结构发生下一次振动时具有较好的初始振动控制效果。
55.综上所述,本发明的半主动可复位双势阱减振装置安装于主体结构,通过空气弹簧进一步提高双势阱减振装置的非线性程度,使系统获得更广的减振频带并且显著降低振子的工作冲程,并且通过振动信号处理器对系统的非线性刚度进行实时收集、识别、判断及调整,使得系统始终保持在最优控制频率区间内工作,从而进一步提高系统的振动控制效果;同时,系统识别装置可以识别振子的工作状态,在振子停止振动后驱动空气弹簧将振子复位,再调控系统刚度至预设刚度,从而保证控制系统的力学模型与初始设计时相符,使系统在主体结构发生下一次振动时具有较好的初始振动控制效果。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。