1.本发明涉及测量领域,尤其涉及一种涡轮导向器喉道面积测量不确定度的评估方法、测量方法、可读介质。
背景技术:
2.燃气流经涡轮导向器的收敛形通道中最小流通截面面积,称之为涡轮导向器喉道面积。喉道面积的大小对涡轮级前后温度、气流流场、流量、推力、转速、油耗率等都有直接影响,是航空发动机整机性能测试调整依据的重要参数。准确地测量出涡轮导向器喉道面积对航空发动机整机性能指标的修正极为重要。对于处于研制阶段的民用航空发动机而言,一般采用三坐标测量法测量喉道面积。民用航空发动机产品在适航性、安全性、可靠性和经济性上要求严苛,随之对涡轮导向器冷态喉道面积测量精度要求也更高,在生产工艺定型前需要对所采用的三坐标测量方法进行验证。
3.对三坐标测量方法的不确定度进行评估是验证其是否满足设计要求的重要手段。现有技术中,对涡轮导向器冷态喉道面积测量不确定度的评估方法,例如徐开明等人在文献“涡轮导向器叶片喉道面积值的三坐标测量”(徐开明,黄治国,郑兴林.涡轮导向器叶片喉道面积值的三坐标测量[j].硅谷,2011,000(002):31-32.)提出的,不确定度评定结果非以面积形式表达(其单位为长度单位),如此无法直接比较不确定度与喉道面积的允许误差值的关系,很难进行对测量方法准确性的验证。
[0004]
本领域需要一种喉道面积测量不确定度的评估方法、测量方法、可读介质,以实现对三坐标测量方法准确性的可靠验证。
技术实现要素:
[0005]
本发明的目的在于提供一种涡轮导向器喉道面积测量不确定度的评估方法。
[0006]
本发明的目的在于提供一种涡轮导向器喉道面积的测量方法。
[0007]
本发明的目的在于提供一种计算机可读介质。
[0008]
根据本发明一个方面的一种涡轮导向器喉道面积测量不确定度的评估方法,包括:步骤a.单个喉道面积的测量模型s0=w
×
h,其中,w、h分别为喉道的等效宽度、等效高度;根据该测量模型,单个喉道面积的计算模型s=s0 δs1
…
δsm,δs1、
…
、δsm为测量过程中由不同因素产生的单个喉道面积测量误差;步骤b.根据所述计算模型,进行所述不同因素引入的不确定度的评估,定义测量过程中同时对喉道宽度与喉道高度的测量产生测量误差的因素为第一因素,则该第一因素导致的不确定度为uc(s)=c1u(w) ccu(h),定义测量过程中对所述等效宽度、等效高度两者之一产生测量误差的因素为第二因素,则该第二因素导致的不确定度为其中,上述的步骤c.单个喉道面积测量的不确定度为
其中其中其中,uc(s0)为测量重复性产生的不确定度,uc(δs1)、
…
、uc(δsm)为测量过程中由不同因素产生的不确定度。
[0009]
在所述评估方法的一个或多个实施例中,还包括步骤d.评估涡轮导向器全环喉道面积测量不确定度,涡轮导向器全环喉道面积为导向器具有的单个喉道面积之和,全环喉道面积的测量模型全环喉道面积的计算模型为其中对于不同单个喉道面积而言各因素的影响相同,其中n为具有的单个喉道面积的数目;全环喉道面积测量的不确定度为环喉道面积测量的不确定度为其中其中
[0010]
在所述评估方法的一个或多个实施例中,所述测量重复性产生的不确定度为a类不确定度,所述不同因素产生的不确定度为b类不确定度。
[0011]
在所述评估方法的一个或多个实施例中,测量过程中的所述不同因素包括三坐标测量机示值误差因素、转台回转误差因素、装夹端面跳动因素、接触式测针半径补偿误差因素。
[0012]
在所述评估方法的一个或多个实施例中,所述三坐标测量机示值误差因素为所述第一因素,所述转台回转误差因素为所述第一因素,所述接触式测针半径补偿误差为所述第一因素,所述装夹端面跳动因素为所述第二因素。
[0013]
在所述评估方法的一个或多个实施例中,所述单个喉道面积测量的扩展不确定度u=k
×
uc(s),其中k为包含引子。
[0014]
在所述评估方法的一个或多个实施例中,所述全环喉道面积测量的扩展不确定度u
环
=k
×
uc(s
环
),其中k为包含引子。
[0015]
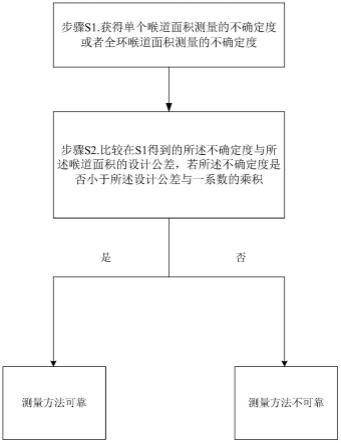
根据本发明一个方面的一种涡轮导向器喉道面积的测量方法,包括:步骤s1.获得如以上任意一项所述的评估方法得到的单个喉道面积测量的不确定度或者全环喉道面积测量的不确定度;比较在s1得到的所述不确定度与所述喉道面积的设计公差,若所述不确定度小于所述设计公差与一系数的乘积,则判断该测量方法可靠。
[0016]
在所述测量方法的一个或多个实施例中,所述系数为0.3。
[0017]
根据本发明一个方面的一种计算机可读介质,其上有计算机程序,该程序被处理器执行实现以下步骤:步骤s10.获得如以上任意一项所述的评估方法得到的单个喉道面积测量的不确定度或者全环喉道面积测量的不确定度,以及获得所述喉道面积的设计公差;步骤s20.比较在s10得到的所述不确定度与所述喉道面积的设计公差,若所述不确定度小于所述设计公差与一系数的乘积,则输出测量方法可靠的判断结果。
[0018]
综上,本发明的进步效果包括但不限于,提出了一种较为完善的单个喉道面积以及全环喉道面积测量的不确定度评估方法,不确定度的结果以面积形式表达,不仅直观且便于同与喉道面积的设计公差进行直接比较,以实现对三坐标测量方法准确性的可靠验证。
附图说明
[0019]
本发明的上述的以及其他的特征、性质和优势将通过下面结合附图和实施例的描述而变得更加明显,需要注意的是,附图均仅作为示例,其并非是按照等比例的条件绘制的,并且不应该以此作为对本发明实际要求的保护范围构成限制,其中:
[0020]
图1是根据一实施例的单个喉道面积测量不确定度的评估方法的示意图。
[0021]
图2是根据一实施例的全环喉道面积测量不确定度的评估方法的示意图。
[0022]
图3是根据一实施例的单个喉道面积测量的测量模型的结构示意图。
[0023]
图4a以及图4b分别是根据一实施例的单个喉道面积测量过程中转台回转误差因素对喉道宽度、喉道高度测量影响的示意图。
[0024]
图5是根据一实施例的单个喉道面积测量过程中装夹端面跳动因素对喉道高度测量影响的示意图。
[0025]
图6是根据一实施例的喉道面积的测量方法的示意图。
具体实施方式
[0026]
下述公开了多种不同的实施所述的主题技术方案的实施方式或者实施例。为简化公开内容,下面描述了各元件和排列的具体实例,当然,这些仅仅为例子而已,并非是对本发明的保护范围进行限制。“一个实施例”、“一实施例”、和/或“一些实施例”意指与本技术至少一个实施例相关的某一特征、结构或特点。因此,应强调并注意的是,本说明书中在不同位置两次或多次提及的“一实施例”或“一个实施例”或“一替代性实施例”并不一定是指同一实施例。此外,本技术的一个或多个实施例中的某些特征、结构或特点可以进行适当的组合。
[0027]
本技术中使用了流程图用来说明根据本技术的实施例的系统所执行的操作。应当理解的是,前面或下面操作不一定按照顺序来精确地执行。也可以将其他操作添加到这些过程中,或从这些过程移除某一步或数步操作。
[0028]
如图1至图3所示的,在一实施例中,涡轮导向器喉道面积三坐标测量不确定度评估方法包括:
[0029]
步骤a:建立测量模型以及计算模型。建立测量模型,对如图3所示的被测涡轮导向器简化喉道进行分析,可推导单个喉道10的面积测量模型为s0=w
×
h,其中w和h看作单个喉道的等效宽度和等效高度。依据得到的测量模型,分析喉道面积测量关键影响因素发现,单个喉道面积受喉道的宽度和高度影响,故对喉部宽度和高度测量结果有影响的因素均会对喉道面积测量结果产生影响,得到单个喉道面积的计算模型s=s0 δs1
…
δsm,δs1、
…
、δsm为测量过程中由不同因素产生的单个喉道面积测量误差,以上因素即为对喉部宽度和高度测量结果有影响的因素。在一些实施例中,以上因素可以是三坐标测量机示值误差因素、转台回转误差因素、装夹端面跳动因素、接触式测针半径补偿误差因素,但不以
此为限。在评估不确定度时,对喉部宽度和高度测量结果有影响的因素的按b类不确定度评估。三坐标测量机示值误差因素,顾名思义,是由于测量机示值误差引入的,包括估测量机示值误差引入的宽度测量不确定度、测量机示值误差引入的高度测量不确定度。转台回转误差因素,包括转台回转误差引入的宽度测量不确定度、转台回转误差引入的高度测量不确定度。具体的影响原理如图4a以及图4b所示的,o为回转中心,y向为周向起始基准方向,e1e2为喉道偏离周向起始基准时的正确测量宽度,e1e3为按周向起始基准方向所实测的喉道的宽度;h1h2为喉道偏离周向起始基准方向时的正确测量高度,h1h3为按周向起始基准方向所实测的喉道的高度。转台回转误差对喉道宽度和高度测量误差模型为向所实测的喉道的高度。转台回转误差对喉道宽度和高度测量误差模型为其中δw为被测喉道宽度误差,δh为被测喉道高度误差,α为转台回转误差。装夹端面跳动因素,包括装夹端面跳动引入的宽度测量不确定度、装夹端面跳动引入的高度测量不确定度。具体的印象原理如图5所示的,对于涡轮导向器喉道而言,装夹端面跳动会当前待测喉道相对初始测量坐标系的倾斜,该倾斜主要影响喉道截面高度尺寸测量,图5中oz为回转轴,oy为周向起始基准方向,包含oy且与oz垂直的平面为基准平面,h1h2为喉道偏离基准平面时的正确测量高度,h1h3为按基准方向所实测的喉道高度。倾斜对喉道高度测量误差模型为其中δh为被测喉道高度误差,β为倾斜角。接触式测针半径补偿误差因素,顾名思义,由接触式测针半径补偿误差引入的,包括接触式测针半径补偿误差引入的宽度测量不确定度、接触式测针半径补偿误差引入的高度测量不确定度。具体的不确定度的评估模型将在后文中详细记载。
[0030]
步骤b.根据所述计算模型,进行所述不同因素引入不确定度的评估,定义测量过程中同时对所述喉道宽度与喉道高度两者测量产生测量误差的因素为第一因素,例如以上举例的因素中,同时影响喉道宽度、喉道高度测量结果的三坐标测量机示值误差因素、转台回转误差因素、接触式测针半径补偿误差因素为第一因素,该第一因素导致的不确定度为uc(s)=c1u(w) c2u(h)。例如三坐标测量机示值误差引入的标准不确定度评定按b类评定,分别评估测量机示值误差引入的宽度测量不确定度、测量机示值误差引入的高度测量不确定度,然后按正相关依据公式uc(s)=c1u(w) c2u(h)合成测量机示值误差引入的面积测量不确定度;转台回转误差引入的标准不确定度评定按b类评定,分别评估转台回转误差引入的宽度测量不确定度、转台回转误差引入的高度测量不确定度,然后按正相关依据公式uc(s)=c1u(w) c2u(h)合成转台回转误差引入的面积测量不确定度;接触式测针半径补偿误差引入的标准不确定度评定按b类评定,分别评估接触式测针半径补偿误差引入的宽度测量不确定度、接触式测针半径补偿误差引入的高度测量不确定度,然后按正相关依据公式uc(s)=c1u(w) c2u(h)合成接触式测针半径补偿误差引入的面积测量不确定度。定义测量过程中对所述等效宽度、等效高度两者之一产生测量误差的因素为第二因素,例如以上举例的因素中,主要对影响喉道截面高度尺寸测量的装夹端面跳动因素为第二因素,对于装夹端面跳动引入的标准不确定度评定按b类评定,分别评估装夹端面跳动引入的宽度测量不确定度、装夹端面跳动引入的高度测量不确定度,然后按不相关依据公式合成装夹端面跳动引入的面积测量不确定度。该第二因素导致的不确定度为其中,上述的
[0031]
步骤c.结合以上因素引入的不确定度,评估单个喉道面积的测量的不确定度。面积测量的不确定度包括有面积测量本身重复性引入的标准不确定度,按a类不确定度评估,当重复性测量次数小于10次,则采用极差法计算试验标准差,当重复性测量次数大于或等于10次,则采用贝塞尔法计算试验标准差。不确定度还包括有上述的不同因素,即上述第一因素以及第二因素,按b类不确定度评估。由于单个喉道面积的测量的第一因素之间、第二因素之间以及第一因素与第二因素之间均无相关性,以及第一因素、第二因素与面积测量重复性也无相关性,单个喉道面积测量的不确定度为重复性也无相关性,单个喉道面积测量的不确定度为其中其中其中,uc(s0)为测量重复性产生的不确定度,uc(δs1)、
…
、uc(δsm)为测量过程中由不同因素产生的不确定度,例如以举例了三坐标测量机示值误差因素、转台回转误差因素、装夹端面跳动因素、接触式测针半径补偿误差因素4个因素,则m=4。在一些实施例中,还包括对于单喉道面积测量扩展不确定度u评估,采用u=k
×
uc(s),其中k为包含引子。
[0032]
步骤d.对于喉道面积测量不确定度的评估,还可以是进行全环喉道面积测量的不确定度评估,全环喉道面积为各单个喉道面积之和。全环喉道面积的测量模型全环喉道面积的计算模型为全环喉道面积的计算模型为其中对于不同单个喉道面积而言各因素的影响相同,其中n为具有的单个喉道面积的数目;全环喉道面积测量的不确定度为量的不确定度为其中在一些实施例中,还包括对于全环喉道面积测量扩展不确定度u评估,采用u=k
×
uc(s
环
),其中k为包含引子。
[0033]
采用以上实施例介绍的不确定度的评估方法的有益效果在于,输出的不确定度的评估结果以面积形式表达,不仅直观且便于同喉道面积的设计公差进行直接比较,以实现对三坐标测量方法准确性的可靠验证。
[0034]
承上所述的,如图6所示的,涡轮导向器喉道面积的测量方法可以包括:
[0035]
步骤s1.获得上述的评估方法得到的单个喉道面积测量的不确定度或者全环喉道面积测量的不确定度;
[0036]
步骤s2.比较在s1得到的所述不确定度与所述喉道面积的设计公差,若所述不确定度小于所述设计公差与一系数的乘积,则判断该测量方法可靠。所述系数可以是0.3,若评估得到不确定度小于0.3*设计公差,则表明该测量方法是可靠的。若大于或等于0.3*设计公差,则表明该测量方法没有通过可靠性验证,该测量方法得到的结果不可靠,不应在后续过程考虑该方法的测量结果。可以理解到,系数的具体值不以0.3为限,可以根据验证可靠性的需要灵活调整。
[0037]
根据本案的另一方面,在一些实施例中,本案还提供了一种计算机可读介质,例如存储介质,其上存储有计算机程序,该程序被处理器执行实现以下步骤:
[0038]
步骤s10.获得以上实施例介绍的不确定度评估方法得到的单个喉道面积测量的不确定度或者全环喉道面积测量的不确定度,以及获得所述喉道面积的设计公差;
[0039]
步骤s20.比较在s10得到的所述不确定度与所述喉道面积的设计公差,若所述不确定度小于所述设计公差与一系数的乘积,则输出测量方法可靠的判断结果,以及还可以输出单个喉道面积或者全环喉道面积的计算模型得到的计算值,否则输出计算值为测量方法不可靠的判断结果。
[0040]
本领域技术人员可以理解到,该程序还可以被执行附加的步骤,如以上校准方法、测量方法中可以由程序执行的步骤。
[0041]
在一些实施例中,存储介质可以被整合到处理器。处理器和存储介质可驻留在专用集成电路(asic)中。asic可驻留在用户终端中。在一个或多个实施例中,处理器和存储介质可作为分立组件驻留在用户终端中。
[0042]
计算机可读介质包括计算机存储介质和通讯介质两者,其包括促成计算机程序从一地向另一地转移的任何介质。存储介质可以是能被计算机访问的任何可用介质。作为示例而非限定,这样的计算机可读介质可包括ram、rom、eeprom、cd-rom或其它光盘存储、磁盘存储或其它磁存储设备、或能被用来携带或存储指令或数据结构形式的合意程序代码且能被计算机访问的任何其它介质。任何连接也被正当地称为计算机可读介质。例如,如果软件是使用同轴电缆、光纤电缆、双绞线、数字订户线(dsl)、或诸如红外、无线电、以及微波之类的无线技术从web网站、服务器、或其它远程源传送而来,则该同轴电缆、光纤电缆、双绞线、dsl、或诸如红外、无线电、以及微波之类的无线技术就被包括在介质的定义之中。如本文中所使用的盘(disk)和碟(disc)包括压缩碟(cd)、激光碟、光碟、数字多用碟(dvd)、软盘和蓝光碟,其中盘(disk)往往以磁的方式再现数据,而碟(disc)用激光以光学方式再现数据。上述的组合也应被包括在计算机可读介质的范围内。
[0043]
综上,以上介绍实施例的有益效果在于,提出了一种较为完善的单个喉道面积以及全环喉道面积测量的不确定度评估方法,不确定度的结果以面积形式表达,不仅直观且便于同喉道面积的设计公差进行直接比较,以实现对三坐标测量方法准确性的可靠验证。
[0044]
本发明虽然以上述实施例公开如上,但其并不是用来限定本发明,任何本领域技术人员在不脱离本发明的精神和范围内,都可以做出可能的变动和修改。因此,凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何修改、等同变化及修饰,均落入本发明权利要求所界定的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。