1.本发明属于偏振光导航技术领域,具体为一种复杂天气下的大气偏振光定向方法。
背景技术:
2.定向技术作为导航技术中的关键一环而备受关注。“惯性 卫星”的组合导航模式已经得到了广泛的应用。然而,惯性导航系统的航向角会随时间增长而快速发散,因此纯惯性导航系统的定向精度远不能满足长航时定向需求;而卫星导航信号极易被干扰,在电磁干扰、城市峡谷、水下等环境无法实现可靠的定向。所以有效地利用更多的导航信息变得十分紧迫。动物天生的自我定向能力引起了极大的研究兴趣。通过本能地利用自然界中存在的各种导航线索,动物可以准确地确定自己的旅行方向。利用在天空中稳定存在的大气偏振模式,可以获得精度高、自主性强、续航时间长的航向角。
3.然而,虽然基于大气偏振模式的定向方式具有精度高、续航时间长、自主性强的特点,但这种模式会因天气的不同而产生不同程度的失真。目前恶劣天气条件下的定向主要基于舍弃被破坏的偏振角度信息,选择高可靠的偏振角度信息来进行定向。这种方法不仅会对大量的天空极化信息造成浪费,同时仅对天空信息被部分干扰条件下有效,当天空极化信息被完全干扰时这种方法便会失效。也就是说除了过曝光、云层、建筑物、树木遮挡等情况外,对于阴天、雾霾、沙尘等全天域被破坏的情况无法有效解决定向精度下降的问题。也正是这种对于天气条件的高度依赖限制了基于大气偏振光导航定向的应用。
技术实现要素:
4.发明目的:为了解决现有技术中基于大气偏振模式的导航定向精度受天气变化影响大的问题,本发明提供了一种复杂天气下的大气偏振光定向方法。
5.技术方案:一种复杂天气下的大气偏振光定向方法,包括以下步骤:
6.(1)对大气偏振图像进行特征提取,根据大气偏振图像特征利用支持向量机对大气偏振图像进行分类,得到天气权重;
7.(2)将大气偏振图像通过斯托克斯矢量法计算为线性偏振强度图像,将大气偏振图像与线性偏振强度图像划分为图像块;分别对大气偏振图像块与线性偏振强度图像块进行噪声估计;将估计出的噪声与天气权重融合,得到最终噪声估计矩阵;
8.(3)建立三边加权稀疏编码模型,将大气偏振图像作为输入量输入所述三边加权稀疏编码模型中;利用所述最终噪声估计矩阵更新三边加权稀疏编码模型中的权值矩阵;利用更新后的权值矩阵输出去噪后的图像;
9.(4)计算去噪后的图像的偏振角度图像;利用偏振角图像结合随机抽样一致算法得到载体坐标系下的太阳方位角;通过天文年历计算得到导航坐标系下的太阳方位角;计算载体坐标系下的太阳方位角及导航坐标系下的太阳方位角的差值,得到绝对航向角。
10.进一步地,步骤(1)中,采用pcanet网络对大气偏振图像进行特征提取,所述
pcanet网络结构为一层输入层、两层卷积层及一层输出层。
11.进一步地,步骤(2)中,将线性偏振强度图像与大气偏振图像均划分为5*5的图像块,将图像块的噪声视为高斯噪声进行噪声估计,设线性偏振强度图像块的噪声估计为σ
d
,大气偏振图像块的噪声估计为σ
p
,则
[0012][0013]
w5=diag(dolp1,
…
,dolp
m
)
ꢀꢀꢀ
(2)
[0014]
其中i为大气偏振图像光强度,w5为线性偏振强度图像块,dolp1为第一个线性偏振强度图像块的线性偏振强度,m为线性偏振强度图像块的个数。
[0015]
进一步地,步骤(2)中,第i个线性偏振强度图像块的线性偏振强度计算为:
[0016][0017]
其中i(0),i(90),i(45),i(135)为0
°
,90
°
,45
°
,135
°
方向的光强度值。
[0018]
进一步地,步骤(3)中,将线性偏振强度图像块及大气偏振图像块估计出的噪声与天气权重融合得到各图像块的最终噪声估计矩阵的公式为:
[0019][0020]
其中,σ
i
为第i个图像块的最终噪声估计矩阵,w4为天气权重,σ
d
、σ
p
分别为偏振强度图像块与大气偏振图像块的噪声估计。
[0021]
进一步地,步骤(3)中,所述三边加权稀疏编码模型为:
[0022][0023]
其中,y为输入图像,d为字典,c为稀疏矩阵,利用最终噪声估计矩阵σ更新三边加权稀疏编码模型中的权重矩阵w1,w2,其中,
[0024][0025]
在此处天气权重w4,线性偏振强度权重w5隐含入模型中为p2大小的单位矩阵,s矩阵通过对输入图像y奇异值分解得到,σ1代表第一个图像块的最终噪声估计矩阵,σ
m
代表第m个图像块的最终噪声估计矩阵,
[0026]
计算出后,通过式计算出去噪后图像
[0027]
进一步地,步骤(4)中,利用斯托克斯矢量计算得到偏振角度图像,所述偏振角度图像aop为:
[0028]
aop=0.5arctan2(i
d
(45)
‑
i
d
(135)/(i
d
(0)
‑
i
d
(90)))
ꢀꢀꢀ
(7)
[0029]
其中,i
d
(0)、i
d
(45)、i
d
(90)、i
d
(135)分别为去噪后图像0
°
,45
°
,90
°
,135
°
方向的光强度值。
[0030]
进一步地,步骤(4)中,太阳方位角的计算公式为:
[0031]
[0032][0033]
其中,k偏振角度图像中太阳子午线斜率,为载体坐标系下的太阳方位角,是导航坐标系下的太阳方位角,θ
s
是太阳高度角,δ是观测点纬度,β是太阳赤纬角;
[0034]
再计算绝对航向角为:
[0035][0036]
有益效果:本发明提供了一种复杂天气下的大气偏振光定向方法,可以在复杂天气下实现大气偏振光定向,缓解大气偏振光定向时受天气影响而出现定向精度显著下降的问题。与现有的偏振光定向方法相比,本发明对不同天气进行区分并对不同的天气赋予不同的权重,提升了大气偏振光定向时抗天气干扰的能力;本发明利用大气偏振图像的稀疏性,在定向前对偏振角度图像进行去噪处理,从大气偏振图像层面恢复了被破坏的偏振角度图像;利用恢复后的偏振角度图像进行拟合定向处理,实现了偏振光系统在复杂天气条件下的准确定向。
附图说明
[0037]
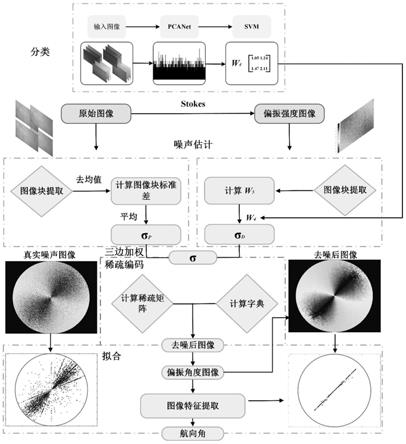
图1为是本发明定向方法的流程图;
[0038]
图2是本发明在过曝光情况下的航向角误差图;
[0039]
图3是本发明在阴天情况下的航向角误差图;
[0040]
图4是本发明在沙尘天气下的航向角误差图;
[0041]
图5是本发明在雾霾天气下的航向角误差图。
具体实施方式
[0042]
下面结合附图和具体实施例,对本发明做进一步的解释说明。
[0043]
如图1所示,一种复杂天气下的大气偏振光定向方法,包括以下步骤:
[0044]
(1)采用主成分分析网络(pcanet)对大气偏振图像进行特征提取,所述pcanet网络结构为一层输入层、两层卷积层及一层输出层。根据大气偏振图像特征利用支持向量机(svm)对大气偏振图像进行分类,得到天气权重w4;
[0045]
本实施例中选取n张m
×
n大小的图像i
i
,i=1,2
…
,n,选取一个k1×
k2的窗口来滑动选取图片的局部特征。每张m
×
n大小的图片i
i
经过滑动窗口提取局部特征之后,就变成了个k1×
k2大小的图像块x
i
。
[0046][0047]
其中对x
i
去平均后得到所有图像聚集为x。
[0048][0049]
设定滤波器个数为l
i
,对x进行主成分分析。
[0050][0051]
取前l
i
个特征向量作为pca滤波器。
[0052][0053]
最终通过卷积操作得到第一阶段的输出其中*代表二维卷积。
[0054]
第二阶段卷积将输入更新为后,重复第一阶段卷积。
[0055]
在输出阶段中,进行哈希编码与直方图统计得到最终的特征形式f
i
,这种特征形式具有高维且稀疏的特点可被用于分类器的实别。考虑到数据映射至更高维空间导致过度拟合等问题我们采用了svm来进行分类。分类后即可得到天气权重w4。
[0056]
(2)在噪声估计阶段,考虑到偏振强度对定向精度的影响,将大气偏振图像通过斯托克斯矢量法计算为线性偏振强度图像,将大气偏振图像与线性偏振强度图像划分为5*5的图像块;
[0057]
将图像块的噪声视为高斯噪声,分别对大气偏振图像块与线性偏振强度图像块进行噪声估计,估计出四通道大气偏振图像中的噪声。设线性偏振强度块的噪声估计为σ
d
,大气偏振图像块的噪声估计为σ
p
;
[0058][0059][0060]
其中i为大气偏振图像光强度,w5为线性偏振强度图像的图像块:
[0061]
w5=diag(dolp1,
…
,dolp
m
)
ꢀꢀꢀ
(6)
[0062]
其中,dolp表示第i个线性偏振强度图像块的线性偏振强度,计算为:
[0063][0064]
其中i(0),i(90),i(45),i(135)为0
°
,90
°
,45
°
,135
°
方向的大气偏振图像的光强度值。
[0065]
将估计出的噪声与天气权重融合,得到各图像块的最终噪声估计矩阵σ
i
:
[0066][0067]
其中,σ
i
为第i个图像的最终噪声估计矩阵,w4为天气权重,σ
d
、σ
p
分别为线性偏振强度图像块与大气偏振图像块的噪声估计。
[0068]
(3)考虑到不同图像块以及不同天气下噪声水平不同,建立三边加权稀疏编码模型,将三边加权稀疏编码融合噪声估计矩阵进行去噪处理。三边加权稀疏编码在数据保真项中引入了两个权重矩阵来表征真实噪声特性,在正则化项中引入另一个权重矩阵来表征自然图像的稀疏性先验。它解决了稀疏编码方法受到l2范数描述的数据保真项的限制,能更好的表征出真实噪声。此外,通过融合噪声估计矩阵表征出的天气影响,能更好的表征出不同天气下的真实噪声。
[0069]
三边加权稀疏编码模型(twsc)如下:
[0070]
[0071][0072]
其中,y,d为字典,c为稀疏矩阵,天气权重w4,线性偏振强度权重w5隐含入模型中,为p2大小的单位矩阵。s矩阵通过对输入图像y奇异值分解得到,w1,w2为由对应图像块的噪声估计确定,σ1代表第一个图像块的最终噪声估计矩阵,σ
m
代表第m个图像块的最终噪声估计矩阵,
[0073]
计算出后,通过式计算出去噪后图像
[0074]
将大气偏振图像作为输入量输入所述三边加权稀疏编码模型中;
[0075]
利用所述最终噪声估计矩阵更新三边加权稀疏编码模型中的权值矩阵w1,w2:利用更新后的权值矩阵输出去噪后的图像;
[0076]
(4)利用斯托克斯矢量计算去噪后的图像的偏振角度图像aop,利用偏振角图像结合随机抽样一致算法ransac对载体坐标系下的太阳子午线进行拟合得到斜率k并定向,得到载体坐标系下的太阳方位角通过天文年历计算得到导航坐标系下的太阳方位角;计算载体坐标系下的太阳方位角及导航坐标系下的太阳方位角的差值,得到绝对航向角
[0077]
aop=0.5arctan2(i
d
(45)
‑
i
d
(135)/(i
d
(0)
‑
i
d
(90)))
ꢀꢀꢀ
(11)
[0078]
θ
s
=arcsin(sinδsinβ cosδcosβcost)
ꢀꢀꢀ
(12)
[0079][0080]
其中i
d
(0)、i
d
(45)、i
d
(90)、i
d
(135)分别为去噪后图像0
°
,45
°
,90
°
,135
°
方向的光强度值。θ
s
为太阳高度角,为太阳方位角,δ为观测点纬度,β为太阳赤纬角,t为太阳时角。
[0081]
以下通过对比试验验证本方法的效果。偏振定向样机是基于索尼芯片以及英伟达tx2搭建而成。采用过曝光条件下的大气偏振模式进行定向可得图2中模型的航向角误差。采用阴天条件下的大气偏振模式进行定向可得图3中模型的航向角误差。采用沙尘暴条件下的大气偏振模式进行定向可得图4中模型的航向角误差。采用雾霾天气下的大气偏振模式进行定向可得图5中模型的航向角误差。对比采用的算法包括:原始拟合,采用偏振强度过滤偏振角度(dolp),稀疏变换学习与低秩模型(strollr),卷积盲去噪网络(cbdnet),三边加权稀疏编码(twsc),天气加权稀疏编码(wwsc)。从图2、图3、图4、图5可以看出,在过曝光、阴天、沙尘暴、雾霾条件下天气加权稀疏编码由于充分考虑到天气以及真实噪声对偏振模式的破坏,所以波动最小,精度最高且可适应不同的天气,在复杂天气下表现出良好的鲁棒性。
[0082]
以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明精神和原则之内所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

