1.本发明涉及海洋结构物探伤修复技术领域,尤其是涉及一种探伤修复一体化无人机及其工作方法。
背景技术:
2.由于恶劣的海洋环境,海洋平台及船舶在工作期间易出现锈蚀,外表面裂纹等一系列损伤问题,这些损伤如果不能及时修复,会严重影响海洋平台及船舶的使用寿命。为确保船舶和海洋平台的正常运行,需要我们定期对船舶和海洋平台进行探伤和修复。
3.现有的定期维护探伤主要依赖人工探伤,人工探伤的特点是:工人自身携带笨重的探伤装置,在几十米的高空作业,这是一项极其危险又耗时的作业,不仅经济成本高、工作效率低,而且x光探伤装置对人体有辐射,严重危害了工人们的身体健康。
技术实现要素:
4.发明目的:本发明的目的是提供一种探伤修复一体化无人机,在解决海洋平台及船舶的锈蚀损伤问题的同时,提高修复工作的经济性、安全性以及修复效率。
5.技术方案:一种探伤修复一体化无人机,包括无人机本体、喷漆喷头、x光探伤装置、除锈打磨片、全方位支撑架、电磁吸附组件、储料箱,无人机本体安装于全方位支撑架的顶部,无人机本体的相对两侧分别滑动连接有一个电磁吸附组件,两个电磁吸附组件对称设置,x光探伤装置安装于无人机本体上部的前端,其下方设有喷漆喷头,喷漆喷头安装于无人机本体的前侧面上,无人机本体的底部安装有储料箱,喷漆喷头与储料箱连通,除锈打磨片在无人机本体下方安装于全方位支撑架的前侧,除锈打磨片在全方位支撑架上移动。
6.进一步的,全方位支撑架包括底座、横向支撑杆、竖向支撑杆、横杆连接杆,底座间隔设有两个,每个底座上分别固定有一个竖向支撑杆,两个竖向支撑杆平行设置,横向支撑杆的两端分别通过一个横杆连接杆与对应的一个竖向支撑杆滑动连接,除锈打磨片通过安装模块滑动安装于横向支撑杆上。
7.进一步的,两个竖向支撑杆上沿其长度方向分别开设有滑槽一,其中一个横杆连接杆的一端通过一滑块与对应的一个竖向支撑杆的滑槽一连接,另一个横杆连接杆的一端安装有马达一,马达一的输出轴上安装有齿轮一,另一个竖向支撑杆的滑槽一中固定有对称间隔设置的一对齿条一,齿轮一在一对齿条一之间分别与二者啮合,马达一与无人机本体信号连接。
8.进一步的,安装模块一端通过多个固定螺钉与除锈打磨片固定连接,安装模块的另一端安装有马达二,马达二的输出轴上安装有齿轮二,横向支撑杆上沿其长度方向开设有滑槽二,滑槽二中对称间隔固定有一对齿条二,齿轮二在一对齿条二之间分别与二者啮合,马达二与无人机本体信号连接。
9.进一步的,电磁吸附组件包括电磁吸盘、线圈、滑轨架、导向杆,电磁吸盘与导向杆的一端固定连接,线圈缠绕于导向杆的外周面上并分别与电磁吸盘、无人机本体电信号连
接,导向杆的另一端与滑轨架的一端垂直固定,滑轨架的另一端上安装有马达三,马达三的输出轴上安装有齿轮三,无人机本体的侧面上开设有滑槽三,滑槽三中对称间隔固定有一对齿条三,齿轮三在一对齿条三之间分别与二者啮合,马达三与无人机本体信号连接。
10.最佳的,无人机本体的内部设有大功率电池、控制器,无人机本体的上部设有传输信号的天线。
11.最佳的,喷漆喷头通过皮管与储料箱连通,喷漆喷头上安装有电磁阀,电磁阀与无人机本体信号连接,喷漆喷头与无人机本体通过球铰结构连接,球铰的底座挖空贯通,球头后设有伸长的杆,伸长的杆与无人机本体内部机械臂连接,机械臂与无人机本体信号连接,通过控制机械臂在xyz方向上的移动,使喷漆喷头实现360
°
旋转喷漆。
12.最佳的,x光探伤装置为xrs3型便携式探伤仪。
13.一种如上述的探伤修复一体化无人机的工作方法,包括以下步骤:
14.步骤一:无人机通过远程控制到达目标海域,进行探伤任务;
15.步骤二:无人机通过x光探伤装置进行结构物表面锈蚀损伤的检测;
16.步骤三:无人机发现损伤部位,静态飞行至结构物附近,使除锈打磨片朝向损伤部位,电磁吸附组件通电产生吸力,使得无人机吸附在结构物表面;
17.步骤四:除锈打磨片通过滑动支撑架移动到锈蚀部位,进行除锈打磨工作;
18.步骤五:打磨完毕,电磁吸附组件断电,使得无人机从结构物表面脱离,无人机飞行使喷漆喷头朝向打磨部位后,电磁吸附组件通电再次吸附在结构物表面;
19.步骤六:喷漆喷头对打磨部位进行初步的喷漆修复;
20.步骤七:喷涂完毕,探伤任务结束,电磁吸附组件断电,无人机飞离目标海域。
21.有益效果:与现有其他技术相比,本无人机可以通过电磁吸附组件使无人机吸附在海洋平台或船舶上,保障无人机作业时的稳定性,x光探伤装置对结构物表面进行探伤作业,降低了人工探伤成本,全方位支撑架配合除锈打磨片进行全方位的打磨,喷漆喷头进行喷漆修复,提高了作业时的效率,本无人机具有高效性、经济性、安全性的特点,应用前景广泛。
附图说明
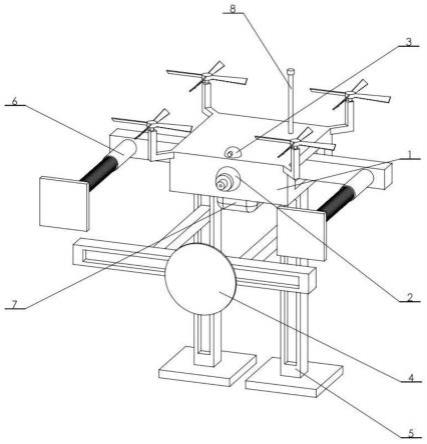
22.图1为本发明的立体结构示意图;
23.图2为本发明的前视图;
24.图3为本发明的俯视图;
25.图4为本发明的侧视图;
26.图5为全方位支撑架的结构示意图;
27.图6为电磁吸附组件的结构示意图。
具体实施方式
28.下面结合附图和具体实施例,进一步阐明本发明,应理解这些实施例仅用于说明本发明而不用于限制本发明的范围。
29.一种探伤修复一体化无人机,如图1~6所示,包括无人机本体1、喷漆喷头2、x光探伤装置3、除锈打磨片4、全方位支撑架5、电磁吸附组件6、储料箱7、天线8、安装模块9,x光探
伤装置3为xrs3型便携式探伤仪,无人机本体1为现有无人机设备,其内部设有大功率电池、控制器等装置,无人机本体1上部的后端设有传输信号的天线8。
30.无人机本体1安装于全方位支撑架5的顶部,全方位支撑架5包括底座51、横向支撑杆52、竖向支撑杆53、横杆连接杆54,底座51间隔设有两个,每个底座51上分别固定有一个竖向支撑杆53,两个竖向支撑杆53平行设置,横向支撑杆52的两端分别通过一个横杆连接杆54与对应的一个竖向支撑杆53滑动连接,除锈打磨片4通过安装模块9滑动安装于横向支撑杆52上,两个竖向支撑杆53的顶端分别与无人机本体1的底部固定。
31.除锈打磨片4在无人机本体1下方安装于全方位支撑架5的前侧,除锈打磨片4可在全方位支撑架5上移动。
32.两个竖向支撑杆53上沿其长度方向分别开设有滑槽一531,其中一个横杆连接杆54的一端通过一滑块与对应的一个竖向支撑杆53的滑槽一531连接,另一个横杆连接杆54的一端安装有马达一,马达一的输出轴上安装有齿轮一,另一个竖向支撑杆53的滑槽一531中固定有对称间隔设置的一对齿条一,齿轮一在一对齿条一之间分别与二者啮合,马达一与无人机本体1信号连接,马达一通过无人机本体1控制启停,启动马达一使齿轮一转动,齿轮一沿着齿条一上下移动,从而带动横向支撑杆52上下移动,使得除锈打磨片4实现沿本无人机竖向的移动。
33.安装模块9一端通过多个固定螺钉与除锈打磨片4固定连接,安装模块9的另一端安装有马达二,马达二的输出轴上安装有齿轮二,横向支撑杆52上沿其长度方向开设有滑槽二521,滑槽二521中对称间隔固定有一对齿条二,齿轮二在一对齿条二之间分别与二者啮合,马达二与无人机本体1信号连接,马达二通过无人机本体1控制启停,启动马达二使齿轮二转动,齿轮二沿着齿条二左右移动,从而带动安装模块9左右移动,使得除锈打磨片4实现沿本无人机横向的移动。
34.为了进一步实现除锈打磨片4沿本无人机前后向的移动,安装模块9可设计为具有气缸的伸缩杆状结构,通过无人机本体1控制气缸实现安装模块9的前后伸缩,从而带动除锈打磨片4沿本无人机的前后向移动,即除锈打磨片4能够在全方位支撑架5上实现xyz向的移动。
35.无人机本体1的相对两侧分别滑动连接有一个电磁吸附组件6,两个电磁吸附组件6对称设置,无人机本体1的相对两侧分别开设有滑槽三631,电磁吸附组件6包括电磁吸盘61、线圈62、滑轨架63、导向杆64,电磁吸盘61与导向杆64的一端固定连接,线圈62缠绕于导向杆64的外周面上并分别与电磁吸盘61、无人机本体1电信号连接,导向杆64的另一端与滑轨架63的一端垂直固定,滑轨架63的另一端上安装有马达三,马达三的输出轴上安装有齿轮三,滑槽三631中对称间隔固定有一对齿条三,齿轮三在一对齿条三之间分别与二者啮合,马达三与无人机本体1信号连接。通过无人机本体1控制马达三,在齿轮齿条传动下,使得电磁吸盘61能够沿本无人机的前后向移动,从而实现对电磁吸附组件6位置的调整,使其能够吸附于多种物体上,无人机本体1给线圈62供电,使得电磁吸盘61产生吸力进行吸附,保证无人机工作时的稳定性。
36.x光探伤装置3安装于无人机本体1上部的前端,其下方设有喷漆喷头2,喷漆喷头2安装于无人机本体1的前侧面上,无人机本体1的底部安装有储料箱7,喷漆喷头2与储料箱7连通。
37.喷漆喷头2通过皮管与储料箱7连通,喷漆喷头2上安装有电磁阀,电磁阀与无人机本体1信号连接,喷漆喷头2与无人机本体1通过球铰结构连接,球铰的底座挖空贯通,球头后设有伸长的杆,伸长的杆与无人机本体1内部机械臂连接,机械臂与无人机本体1信号连接,通过控制机械臂在xyz方向上的移动,使喷漆喷头2实现360
°
旋转喷漆。
38.无人机本体1的内部设有大功率电池、控制面板等装置,控制面板集成了全方位支撑架5、除锈打磨片4、喷漆喷头2、电磁吸附组件6和x光探伤装置3的操作系统,无人机本体1的上部设有传输信号的天线8,通过传输信号的天线8接收远程遥控指令,进行探伤作业。
39.上述的探伤修复一体化无人机的工作方法,包括以下步骤:
40.步骤一:无人机通过远程控制到达目标海域,进行探伤任务;
41.步骤二:无人机一边飞行一边通过x光探伤装置进行结构物表面锈蚀损伤的检测;
42.步骤三:无人机发现损伤部位,静态飞行至结构物附近,使除锈打磨片朝向损伤部位,线圈通电使电磁吸盘产生吸力,马达三启动电磁吸盘向结构物表面靠近,通过与无人机本体的配合,使得整个无人机通过前端两个电磁吸盘吸附在结构物表面;
43.步骤四:通过无人机本体控制马达一、马达二和安装模块,使除锈打磨片移动到锈蚀部位,进行除锈打磨工作;
44.步骤五:打磨完毕,电磁吸附组件断电,使得无人机从结构物表面脱离,无人机飞行使喷漆喷头朝向打磨部位后,电磁吸附组件通电再次吸附在结构物表面;
45.步骤六:控制机械臂带动喷漆喷头对打磨部位进行初步的喷漆修复;
46.步骤七:喷涂完毕,探伤任务结束,电磁吸附组件断电,无人机飞离目标海域。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。