1.本发明属于测绘无人机技术领域,具体涉及一种测绘无人机升降稳定装置及方法。
背景技术:
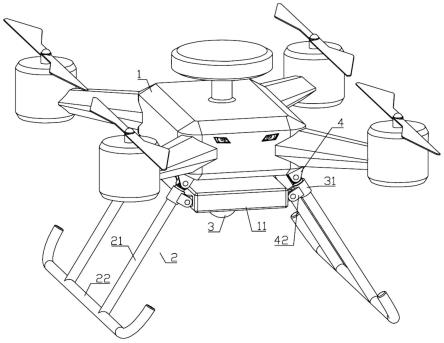
2.如说明书附图1所示,这是一种较为常见的测绘无人机,主要由无人机本体和测绘仪器主体构成,无人机本体下端左右两侧具有两个支撑架,用于将无人机本体支撑在地面上,测绘仪器主体固接在无人机本体下端,测绘仪器主体通过其下端的镜头进行数据采集,为避免测绘仪器主体与地面接触,因此支撑架的下端会远低于测绘仪器主体下端,然而这样的情况在空中进行数据采集时,支撑架会遮挡镜头侧面的采集视线,为了保持采集效率就需要让无人机飞到更高的高度来拓宽采集视线,然而过高的高度会降低采集精度,同时还会影响遥控信号的稳定性,一些空域还会对无人机的飞行高度进行管制,基于上述这些原因,这种测绘无人机通常只能在低空以较小的采集视线进行低效率采集,为改善这一情况,我们在这种测绘无人机的基础上做出了改进。
技术实现要素:
3.本发明的目的是:旨在提供一种测绘无人机升降稳定装置及方法,用于解决背景技术中存在的问题。
4.为实现上述技术目的,本发明采用的技术方案如下:
5.一种测绘无人机升降稳定装置,包括无人机本体和测绘仪器主体,所述无人机本体下端左右两侧均铰接有升降架;
6.所述升降架包括两根前后平行分布且与无人机本体铰接连接的滑杆,两个所述滑杆下端共同连接有横杆;
7.所述测绘仪器主体的镜头位于测绘仪器主体下端,所述测绘仪器主体左右两侧均铰接有两个前后分布的滑块,同侧的两个所述滑块分别与同侧升降架的两个滑杆滑动连接;
8.所述测绘仪器主体上端设有与无人机本体下端连接的高度调节机构,所述高度调节机构能够带动测绘仪器主体相对于无人机本体进行上下运动;
9.所述测绘仪器主体与无人机本体信号连接,所述高度调节机构与测绘仪器主体电性连接。
10.所述无人机本体下端左右两侧均设有两个前后分布的第一铰接座,所述滑杆上端设有用于与第一铰接座进行铰接的第一铰接台。
11.同一个升降架的第一铰接台、横杆和滑杆为一体成型结构。
12.所述滑块侧面固接有第二铰接座,所述测绘仪器主体侧面设有与第二铰接座进行铰接的第二铰接台。
13.所述第二铰接座与滑块为一体成型结构。
14.所述滑杆横截面为圆形,所述滑块为与滑杆相匹配的圆筒状,所述滑块套设在滑杆外侧。
15.所述高度调节机构包括与测绘仪器主体固接的步进电机,所述步进电机的输出轴设有收放线组件;
16.所述收放线组件包括收线盘,所述收线盘内侧固接有拉线,所述拉线另一端固接在无人机本体下端。
17.所述步进电机输出轴的两端均设有收放线组件。
18.一种测绘无人机升降稳定装置的升降控制方法,包括升高步骤和降落步骤:
19.升高时,通过遥控器控制无人机本体起飞,无人机本体飞行到测绘高度时,将高度信号传输给测绘仪器主体,测绘仪器主体接受到高度信号后控制高度调节机构带动测绘仪器主体相对于无人机本体向下运动,直到测绘仪器主体不能向下运动为止;
20.降落时,通过遥控器控制无人机本体降落,无人机本体接收到降落信号后将降落信号传输给测绘仪器主体,测绘仪器主体接受到降落信号后控制高度调节机构带动测绘仪器主体相对于无人机本体向上运动,直到测绘仪器主体不能向上运动为止。
21.本发明提供一种测绘无人机升降稳定装置及方法,该无人机下侧的升降架能够在升空后向内收拢,让测绘仪器主体的镜头低于两个升降架的下端,避免采集视线被升降架遮挡,这样无需升高无人机的飞行高度便能保障采集效率。
附图说明
22.本发明可以通过附图给出的非限定性实施例进一步说明。
23.图1为现有测绘无人机的结构示意图;
24.图2为本发明的结构示意图一;
25.图3为本发明的结构示意图二;
26.图4为图3中a处的结构放大示意图。
27.主要元件符号说明如下:
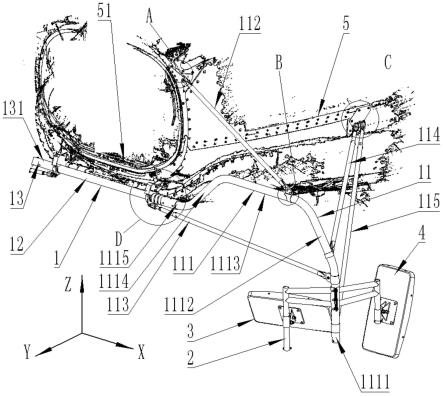
28.无人机本体1、测绘仪器主体11、升降架2、滑杆21、横杆22、镜头3、滑块31、第一铰接座4、第一铰接台41、第二铰接座42、第二铰接台43、步进电机5、收线盘51、拉线52。
具体实施方式
29.为了使本领域的技术人员可以更好地理解本发明,下面结合附图和实施例对本发明技术方案进一步说明。
30.如图1-4所示,本发明的一种测绘无人机升降稳定装置,包括无人机本体1和测绘仪器主体11,无人机本体1下端左右两侧均铰接有升降架2;
31.升降架2包括两根前后平行分布且与无人机本体1铰接连接的滑杆21,两个滑杆21下端共同连接有横杆22;
32.测绘仪器主体11的镜头3位于测绘仪器主体11下端,测绘仪器主体11左右两侧均铰接有两个前后分布的滑块31,同侧的两个滑块31分别与同侧升降架2的两个滑杆21滑动连接;
33.测绘仪器主体11上端设有与无人机本体1下端连接的高度调节机构,高度调节机
构能够带动测绘仪器主体11相对于无人机本体1进行上下运动;
34.测绘仪器主体11与无人机本体1信号连接,高度调节机构与测绘仪器主体11电性连接。
35.无人机本体1下端左右两侧均设有两个前后分布的第一铰接座4,滑杆21上端设有用于与第一铰接座4进行铰接的第一铰接台41。
36.同一个升降架2的第一铰接台41、横杆22和滑杆21为一体成型结构。
37.滑块31侧面固接有第二铰接座42,测绘仪器主体11侧面设有与第二铰接座42进行铰接的第二铰接台43。
38.第二铰接座42与滑块31为一体成型结构。
39.滑杆21横截面为圆形,滑块31为与滑杆21相匹配的圆筒状,滑块31套设在滑杆21外侧。
40.高度调节机构包括与测绘仪器主体11固接的步进电机5,步进电机5的输出轴设有收放线组件;
41.收放线组件包括收线盘51,收线盘51内侧固接有拉线52,拉线52另一端固接在无人机本体1下端。
42.步进电机5输出轴的两端均设有收放线组件。
43.一种测绘无人机升降稳定装置的升降控制方法,包括升高步骤和降落步骤:
44.升高时,通过遥控器控制无人机本体1起飞,无人机本体1飞行到测绘高度时,将高度信号传输给测绘仪器主体11,测绘仪器主体11接受到高度信号后控制高度调节机构带动测绘仪器主体11相对于无人机本体1向下运动,直到测绘仪器主体11不能向下运动为止;
45.降落时,通过遥控器控制无人机本体1降落,无人机本体1接收到降落信号后将降落信号传输给测绘仪器主体11,测绘仪器主体11接受到降落信号后控制高度调节机构带动测绘仪器主体11相对于无人机本体1向上运动,直到测绘仪器主体11不能向上运动为止。
46.测绘仪器主体11控制步进电机5的转轴转动时,能够带动收线盘51对拉线52进行收放;
47.放线时,测绘仪器主体11将在重力作用下相对于无人机本体1向下降落,在这个过程中测绘仪器主体11将通过两侧的滑块31带动两侧的升降架2同时向中间收拢,待两侧的滑块31抵接在两侧的横杆22上时,也就是测绘仪器主体11不能继续向下运动时,测绘仪器主体11的镜头3将低于两个升降架2的下端,该状态的测绘仪器主体11进行数据采集时,其采集视线不会被升降架2遮挡,采集视线较广,无需升高无人机的飞行高度来保障采集效率;
48.收线时,拉线52将拉动测绘仪器主体11相对于无人机本体1向上升起,在这个过程中测绘仪器主体11将通过两侧的滑块31带动两侧的升降架2同时向左右两侧张开形成八字形,待步进电机5抵接无人机本体1下端时,也就是测绘仪器主体11不能继续向上运动时,两侧的升降架2将完全展开,同时测绘仪器主体11将收在两个升降架2内侧,此时两个升降架2便被释放开,这便能为无人机本体1降落提供稳定支撑。
49.测绘仪器主体11的上下运动的行程可通过控制步进电机5转动的时间来实现,拉线52可采用具有弹性的拉线。
50.上述实施例仅示例性说明本发明的原理及其功效,而非用于限制本发明。任何熟
悉此技术的人士皆可在不违背本发明的精神及范畴下,对上述实施例进行修饰或改变。因此,凡所属技术领域中具有通常知识者在未脱离本发明所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本发明的权利要求所涵盖。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。