技术特征:
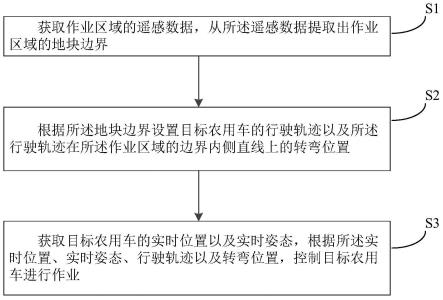
1.一种履带式农用车的自动导航方法,其特征在于,包括以下步骤:s1,获取作业区域的遥感数据,从所述遥感数据提取出作业区域的地块边界;s2,根据所述地块边界设置目标农用车的行驶轨迹以及所述行驶轨迹在所述作业区域的边界内侧直线上的转弯位置;s3,获取目标农用车的实时位置以及实时姿态,根据所述实时位置、实时姿态、行驶轨迹以及转弯位置,控制目标农用车进行作业。2.根据权利要求1所述的履带式农用车的自动导航方法,其特征在于,所述遥感数据为无人机学遥感数据。3.根据权利要求2所述的履带式农用车的自动导航方法,其特征在于,在所述步骤s1中,包括以下对所述无人机学遥感数据的预处理:对所述无人机学遥感数据中的图像进行几何校正;对经过几何校正后的图像进行图像拼接。4.根据权利要求2所述的履带式农用车的自动导航方法,其特征在于,在所述步骤s1中,通过以下方式对所述无人机学遥感数据中的图像进行几何校正:采用高价阶误差模型的gnss组合定位方法获取成像瞬间的传感器外方位元素,结合少量地面捡乱点实现图像位置的快速精密求解。5.根据权利要求4所述的履带式农用车的自动导航方法,其特征在于,在所述步骤s1中,依序通过图像去噪、图像配准以及图像融合对所述无人机学遥感数据中的图像进行图像拼接;在图像配准的过程中采用基于灰度的图像配准算法或基于变换域的图像配准算法或基于图像特征的图像配准算法进行。6.根据权利要求1所述的履带式农用车的自动导航方法,其特征在于,在所述步骤s3中,包括以下基于模糊-pid的农业机械路径跟踪控制过程:利用预瞄控制得到目标农用车实时位置与行驶轨迹的横向偏差以及航向偏差;当所述横向偏差在[-0.3m,0.3m]且航向偏差在[-30
°
,30
°
]时,利用线性公式将所述横向偏差以及航向偏差拟合为一个误差error;将所述误差error输入到pid控制器中,将pid控制器的输出量作为前轮转角。7.根据权利要求1所述的履带式农用车的自动导航方法,其特征在于,在所述步骤s3中,通过以下方式控制目标农用车进行转向:控制目标农用车行驶到所述行驶轨迹上的一段直线段末端,此时航向为b1,停止目标农用车;使目标农用车的方向盘左转转到最大,控制目标农用车左转,控制目标农用车继续行驶;在目标农用车左转至航向改变a角度,停止目标农用车;使目标农用车的方向盘右转到最大,控制目标农用车继续行驶,直到航向为b2,停止目标农用车,使目标农用车的方向盘回正。8.一种履带式农用车的自动导航系统,其特征在于,包括依序连接的地块边界提取模块(1)、行驶轨迹与转弯位置设置模块(2)以及作业控制模块(3);其中:所述地块边界提取模块(1)用于获取作业区域的遥感数据,从所述遥感数据提取出作业区域的地块边界;所述行驶轨迹与转弯位置设置模块(2)用于根据所述地块边界设置目标农用车的行驶轨迹以及所述行驶轨迹在所述作业区域的边界内侧直线上的转弯位置;
所述作业控制模块(3)用于获取目标农用车的实时位置以及实时姿态,根据所述实时位置、实时姿态、行驶轨迹以及转弯位置,控制目标农用车进行作业。9.一种存储介质,其上储存有计算机程序,其特征在于:所述计算机程序被处理器执行时实现如权利要求1至7任一项所述的履带式农用车的自动导航方法的步骤。10.一种履带式农用车,其特征在于:其设有存储介质、处理器以及储存在所述存储介质中并可被所述处理器执行的计算机程序,所述计算机程序被处理器执行时实现如权利要求1至7任一项所述的履带式农用车的自动导航方法的步骤对所述履带式农用车进行导航。
技术总结
本发明针对现有技术的局限性,提出了一种履带式农用车的自动导航方法,通过在地块边界设定的基础上,对农用车行进轨迹进行标定,并获取实时位置姿态的手段,进行农用车自动导航和行程规划处理,能让农机在农场标定的环境下,得到更加准确的导航效果,此法有利于提升农机的运行效率,显著降低不同农机操作手导致的行驶精度差异和可靠性差异,并有效缓解农机作业人员不断扭头回看作业质量所造成的劳作压力。压力。压力。
技术研发人员:张园 韦丽娇 郑军 郑鸿基 欧忠庆 邓干然 王昌权 刘智强 郭昌进
受保护的技术使用者:中国热带农业科学院农业机械研究所
技术研发日:2022.08.24
技术公布日:2022/11/11
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。