1.本发明属于船舶模型操纵性试验技术领域,具体涉及一种用于船舶与海洋工程结构水池实验用的空间运动机构。
背景技术:
2.使用平面运动机构(pmm)对船舶力学、船舶操纵性等技术领域广泛应用,尤其在船舶操纵性试验的约束模型试验中;平面运动机构(pmm)以精确的预编程模式移动容器模型,同时使用附在模型上的测力计测量产生的力和力矩,从这些研究中可以确定模型运动方程中的水动力稳定系数或导数,然后,用来估计或模拟全尺寸船舶的运动;虽然有些系数可用理论计算的方法近似的获得,但使用船舶模型试验是目前公认最精确可靠的途径。
3.在平面运动机构(pmm)操纵船舶实验中,是通过纯横荡、纯艏摇、直线斜拖以及这三种典型运动的叠加使用来测量力和力矩,不能保证是在准确的航行工况下得到的水动力学稳定系数,因为,船舶航行过程应存在六自由度运动及其相互耦合的情况。
4.因此,如何设计一种用于船舶与海洋工程结构模型水池实验用的空间运动机构,能够满足对操纵船模位置和姿态的要求,实现船舶在不同航行状态的模拟,这是本领域亟待解决的技术问题。
技术实现要素:
5.本发明针对现有技术存在的问题和不足,提供一种用于船舶与海洋工程结构模型水池实验用的空间运动机构,能够满足对操纵船模位置和姿态的要求,实现船舶在不同航行状态的模拟。
6.本发明的目的是通过以下技术方案实现的:一种用于船舶与海洋工程结构模型水池实验用的空间运动机构,包括stewart并联机构、起重机构、模型连接部件,其特征在于,所述stewart并联机构包括6条可伸缩支链、上平台、下平台及力传感器,所述下平台上设置球铰基座,所述可伸缩支链一端通过球铰与所述下平台上的球铰基座连接,另一端通过万向联轴器连接在所述上平台上,所述力传感器安装于可伸缩支链的下端处;所述起重机构包括行车机构,所述上平台安装在所述行车机构的底部,所述下平台连接所述模型连接部件;所述模型连接部件的下端用于连接船舶模型或海洋平台模型,使所述船舶模型或海洋平台模型随所述下平台进行六自由度运动。
7.对上述技术方案的改进:所述可伸缩支链的伸缩通过直线移动机构驱动,在初始位置时,6条所述可伸缩支链的长度相等,用于保证所述下平台及所述船舶模型或海洋平台模型位于中心水平位置。
8.对上述技术方案的进一步改进:所述的直线移动机构为丝杠驱动机构或液压缸,所述液压缸由伺服阀控制实现伸缩运动。
9.对上述技术方案的进一步改进:所述stewart并联机构中的力传感器为6个,分别安装在6个所述球铰基座上。
10.对上述技术方案的进一步改进:所述起重机构还包括桥架结构、车轮组及铺设在水池两侧的轨道,所述桥架机构通过4条刚性支腿支撑,所述车轮组与所述刚性支腿下端连接,所述车轮组设置在所述轨道上,所述起重机构沿所述轨道进行平行于所述水池中的水流方向主运动;所述桥架机构上安装有横向导轨,所述行车机构设置在所述横向导轨上,所述行车机构沿着所述横向导轨进行垂直于所述水池中的水流方向移动。
11.对上述技术方案的进一步改进:所述行车机构包括电动机、减速器、制动器、卷筒以及行车车轮组,所述卷筒通过绳索固定模型连接部件,所述电动机为动力源,所述减速器将电动机高转速降低到工作转速,所述行车车轮组包括行车轮和轴承箱,所述行车轮设置在所述桥架结构上的导轨中,使得所述行车机构沿着导轨移动。
12.对上述技术方案的进一步改进:所述模型连接部件的上端与所述stewart并联机构的下平台通过螺栓可拆卸方式连接,所述模型连接部件的下端与所述船舶或海洋平台模型通过螺栓连接固定,由液压伸缩缸进行伸缩运动控制下端连接的所述船舶模型或海洋平台模型高度。
13.本发明的优点和积极效果是:本发明的装置结构简单,体积小,造价低,通过伺服阀控制六个可伸缩支链的直线运动,能够实现下平台的六自由度耦合运动,且刚度高、承载能力大、误差小精度高;能够有效保证对操纵船舶模型(或海洋平台模型)位置和姿态的要求,实现船舶在不同航行状态的模拟。
附图说明
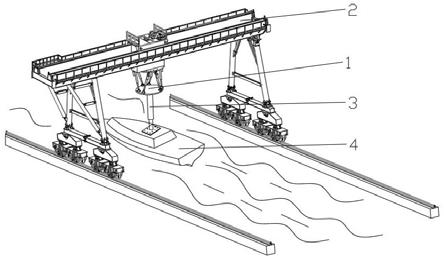
14.图1是本发明一种用于船舶与海洋工程结构模型水池实验用的空间运动机构的示意图;图2是本发明一种用于船舶与海洋工程结构模型水池实验用的空间运动机构中stewart并联机构装置的结构示意图;图3是本发明一种用于船舶与海洋工程结构模型水池实验用的空间运动机构中起重机构装置的结构示意图;图4是本发明一种用于船舶与海洋工程结构模型水池实验用的空间运动机构中模型连接部件的结构示意图。
15.图中,1-stewart并联机构、2-起重机构、3-模型连接部件、4-船舶模型、101-下平台、102-球铰基座、103-球铰、104-可伸缩支链、105-伺服阀、106-万向联轴器、107-上平台、201-轨道、202-车轮组、203-刚性支腿、204-桥架结构、205-行车轮、206-电动机、207-卷筒、208-减速器、301-伸缩缸、302-螺栓孔。
具体实施方式
16.以下结合附图和实施例对本发明作进一步详细描述:参见图1-图4,本发明一种用于船舶与海洋工程结构模型水池实验用的空间运动机构的实施例,包括stewart并联机构1、起重机构2及模型连接部件3,所述stewart并联机构1包括6条可伸缩支链104、上平台107、下平台101及力传感器。在下平台101上设置球铰基座102,可伸缩支链104一端通过球铰103与所述下平台101上的球铰基座102连接,可伸缩支
链104的另一端通过万向联轴器106连接在上平台107上,所述力传感器安装于可伸缩支链104的下端处。起重机构2包括行车机构,所述上平台107安装在所述行车机构的底部,所述下平台101连接所述模型连接部件3。所述模型连接部件3的下端用于连接船舶模型4(或海洋平台模型),使所述船舶模型4(或海洋平台模型)随所述下平台101进行六自由度运动,操纵船舶模型4(或海洋平台模型)模拟真实海况进行特定的运动。
17.进一步地,上述可伸缩支链104的伸缩通过直线移动机构驱动,在初始位置状态,6条所述可伸缩支链的长度相等,用于保证下平台101及船舶模型4(或海洋平台模型)位于中心水平位置。
18.优选地,上述的直线移动机构为丝杠驱动机构或液压缸,所述液压缸由伺服阀105控制实现伸缩运动。上述stewart并联机构1中的力传感器为6个,分别安装在下平台101上的6个球铰基座102上。
19.再进一步地,如图3所示,上述起重机构2还包括桥架结构204、车轮组202及铺设在水池两侧的轨道201,桥架机构204通过4条刚性支腿203支撑,车轮组202与刚性支腿203的下端连接,车轮组202设置在轨道201上,所述起重机构沿轨道201进行平行于所述水池中的水流方向主运动。上述桥架机构204上安装有横向导轨,上述的行车机构设置在所述横向导轨上,所述行车机构沿着所述横向导轨进行垂直于所述水池中的水流方向移动。
20.又进一步地,上述行车机构包括电动机206、减速器208、制动器、卷筒207以及行车车轮组,所述卷筒207通过绳索固定模型连接部件3,所述电动机206为动力源,所述减速器208将电动机206高转速降低到工作转速,所述行车车轮组包括行车轮205和轴承箱,所述行车轮205设置在所述桥架结构上204的横向导轨上,使得所述行车机构沿着横向导轨移动。
21.优选地,上述模型连接部件3的上端与stewart并联机构1的下平台101通过螺栓可拆卸方式连接,模型连接部件3的下端与船舶模型4(或海洋平台模型)通过螺栓连接固定,由伸缩缸301进行伸缩运动控制下端连接的船舶模型4(或海洋平台模型)高度。
22.如图4所示,模型连接部件3包括伸缩缸301和连接板,所述伸缩缸301的伸缩端上设置连接板,在连接板上设置螺栓孔302,用螺栓穿过螺栓孔302可以固定船舶模型4(或海洋平台模型)。
23.当然,上述说明并非是对发明的限制,本发明也并不限于上述举例,本技术领域的普通技术人员,在本发明的实质范围内,所做出的变化、改型、添加或替换,也应属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
