用于直线运动的具有磁耦合的自动取样器轨道系统
1.相关申请的交叉引用
2.本技术根据美国法典(u.s.c.)第35卷第119(e)款的规定要求2020年3月20日提交的标题为“用于直线运动的具有磁耦合的自动取样器轨道系统(autosampler rail system with magnetic couppling for linear motion)”的美国临时申请no.62/992,334的权益。美国临时申请no.62/992,334被通过引用全部并入到本文中。
背景技术:
3.在许多实验室环境中,通常需要分析位于单个样品容器中的大量化学或生化样品。为了简化这些过程,样品的操作已经被机械化。这种机械化取样通常被称为自动取样,并被使用自动取样装置或自动取样器来执行。
技术实现要素:
4.描述了自动取样器系统,其防止金属颗粒从自动取样器中释放,否则这些金属颗粒可能在样品分析期间在样品内被检测到。系统实施例包括但不限于样品探针支撑结构,该结构被配置为保持样品探针以通过样品探针传输流体样品;与样品探针支撑结构联接的z轴支撑件;外梭,其与z轴支撑件件的外表面联接并与样品探针支撑结构联接;以及内梭,其可在z轴支撑件的内部容积内线性移动,内梭与外梭磁耦合以将内梭的线性运动转移到外梭,从而提供样品探针支撑结构的线性运动。
5.在一方面,自动取样器系统包括但不限于样品探针支撑结构,该结构被配置为保持样品探针以通过样品探针传输流体样品;与样品探针支撑结构联接的z轴支撑件;外梭,其与z轴支撑件联接并与样品探针支撑结构联接,该外梭包括至少一个第一磁体;内梭,其可在z轴支撑件的内部容积内线性移动,该内梭包括至少一个第二磁体,该内梭经由第一磁体与第二磁体之间的磁相互作用与外梭磁耦合,从而将内梭的线性运动转移到外梭,以提供样品探针支撑结构的线性运动,其中,z轴支撑件包括具有设置在外梭与内梭之间的部分的管,该管限定内梭在直线运动期间穿过其中的内部容积。
6.提供本发明内容是为了以简化形式介绍概念的选择,这些概念将在下面的详细描述中予以进一步描述。本发明内容并非旨在识别所要求保护的主题的关键特征或基本特征,也不旨在用作确定所要求保护的主题的范围的辅助物。
附图说明
7.参考附图描述了该详细描述。在说明书和附图中的不同实例中使用相同的附图标记可以指代相似或相同的项目。
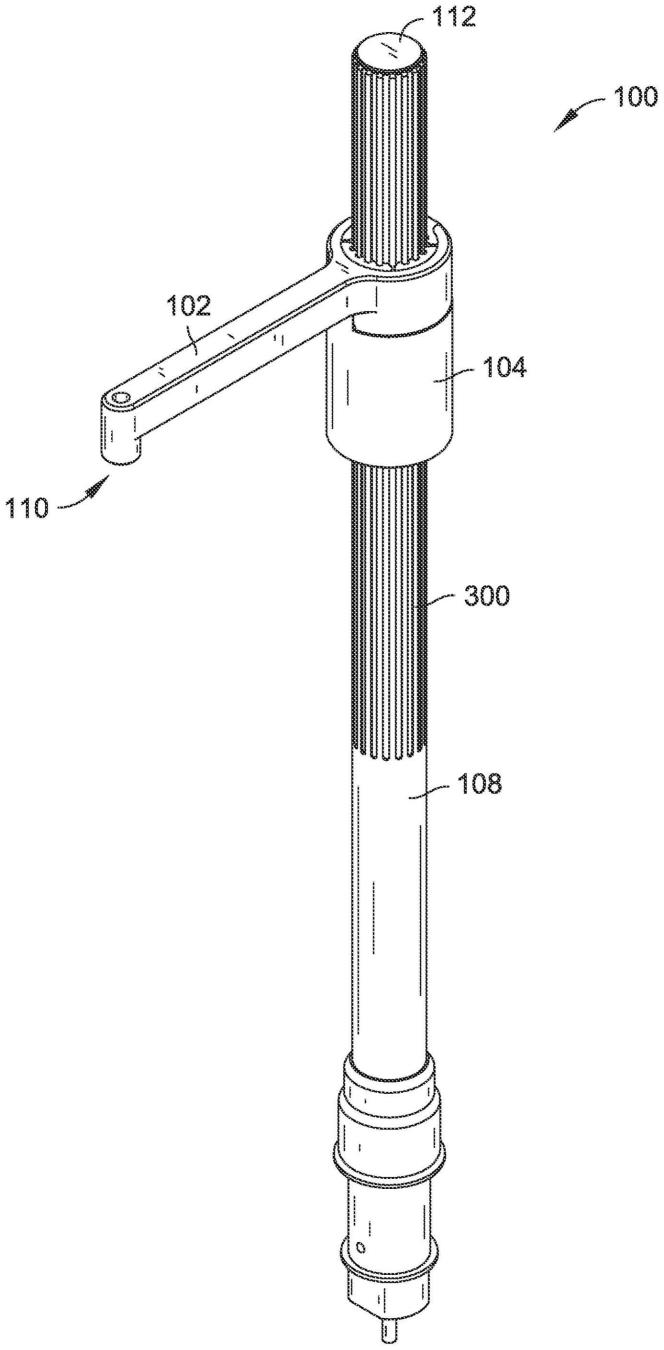
8.图1a是根据本公开的示例性实施例的用于防止金属颗粒从自动取样器中释放的自动取样器探针轨道系统的等距视图,否则该金属颗粒在样品分析期间可能在样品中被检测到。
9.图1b是图1a的自动取样器探针轨道系统的等距视图,其中,自动取样器的支撑臂
被沿着z轴过渡到较低位置。
10.图1c是图1a的自动取样器探针轨道系统的等距视图,其中,该支撑臂被围绕z轴旋转。
11.图2是图1a的自动取样器探针轨道系统的局部截面侧视图。
12.图3是图1a的自动取样器探针轨道系统的内梭的局部等距视图。
13.图4是图1a的自动取样器探针轨道系统的局部截面等距视图,其示出了与由外梭支撑的磁体相关的由内梭支撑的磁体。
14.图5是具有相关驱动系统的图1a的自动取样器探针轨道系统的局部截面侧视图。
15.图6是图1a的自动取样器探针轨道系统的俯视图。
16.图7是图1a的自动取样器探针轨道系统的支撑臂的等距视图。
17.图8是根据本公开的示例性实施例的图1a的自动取样器探针轨道系统的外梭的局部等距视图。
具体实施方式
18.概述
19.自动取样装置或自动取样器可相对于竖直定向的杆支撑样品探针,该杆沿着或横过一个或多个移动方向移动该样品探针。例如,该样品探针可被通过探针支撑臂或其他装置联接到杆的可竖直移动部分,以在竖直方向上移动该探针,以便将探针定位到位于自动取样器的平台上的样品容器(例如,管或其他容器)、冲洗容器、标准化学品容器、稀释剂容器等中或从其中取出。在其他情况下,可以旋转杆以促进探针围绕水平面的移动,以将探针定位在位于平台上的其他样品容器和其他容器的上方。
20.自动取样器可以包括金属机械或结构部件,它们相对于彼此移动以促进探针的一种或多种运动。随着部件开始磨损(例如,通过基于反复摩擦的相互作用),金属颗粒会被释放到自动取样器的平台上,并释放到被围绕探针臂定位的容器中。例如,金属颗粒可被直接沉积到样品容器中、探针上或在样品制备过程中使用的其他容器(例如,冲洗容器、标准化学品容器、稀释剂容器等)中,从而将污染物引入样品或其他流体。这种污染物可经由分析仪器检测到,并且可以通过提供关于由引入以供探针分析的流体的成分的不可靠或不准确的数据来使样品和其他流体的分析测量值存在误差。此外,金属机械或结构部件可能会被暴露于自动取样器平台上存在的刺激性化学品,例如腐蚀性酸,这会通过自动取样器的正常操作加速金属颗粒的释放。
21.因此,公开了用于防止金属颗粒从自动取样器中释放的系统和方法,否则金属颗粒可能在样品分析期间在样品内被检测到。在一方面,一种系统包括与被配置成支撑样品探针的外梭磁耦合的内梭。内梭被封装在由化学惰性材料(例如,含氟聚合物)形成或涂敷有该材料的管内,并且外梭由化学惰性材料(例如,含氟聚合物)形成或涂敷有该材料,使得没有金属特征在自动取样器的运行期间被暴露于外部环境。内梭在该管内移动,并且该运动被经由磁耦合传递到外梭,该磁耦合又被传递到探针支撑结构。在实施方式中,该管在该管的外表面上限定表面特征(例如,花键),而外梭在内表面上具有对应特征。该管的表面特征和外梭的表面特征相互作用以将管的旋转运动传递到外梭,该旋转运动又被传递到探针支撑结构。自动取样器有助于样品探针的多个运动平面,而不会存在金属颗粒暴露于位于
自动取样器的平台上的样品容器和其他容器的风险。
22.示例性实施方式
23.参考图1a至图8,示出了根据本公开的示例性实施例的用于防止金属颗粒从自动取样器中释放的自动取样器探针轨道系统(“系统100”),否则该金属颗粒在样品分析期间可能在样品内被检测到。系统100通常包括探针支撑臂102、外梭104、内梭106和z轴支撑件108。系统100的一个或多个部分可以由化学惰性材料形成或涂敷有该化学惰性材料,以防止金属部件暴露于系统100的外部环境,从而防止将金属污染物引入到样品容器或与自动取样器相邻的其他流体容器中。在实施方式中,探针支撑臂102、外梭104和z轴支撑件各自包括由化学惰性材料形成或涂敷有该化学惰性材料的结构,该材料例如为含氟聚合物,例如聚四氟乙烯(ptfe)。在实施方式中,系统100的所有外表面包括化学惰性材料以防止系统100在被暴露于存在于平台上的样品或以其他方式暴露于外部环境时发生腐蚀或其他材料击穿。
24.探针支撑臂102包括探针支撑件110,该探针支撑件110保持样品探针和相关联的管道,用于从邻近系统100定位例如在自动取样器系统的平台上的样本容器中抽取流体或将流体引入到这些样本容器中。探针支撑臂102被联接到外梭104(例如,经由摩擦配合互锁、经由卡扣联接等),其中,探针支撑臂102和外梭104中的每一个限定孔隙,其中,z轴支撑件108的上部112装配到该孔隙中以将探针支撑臂102和外梭104联接到z轴支撑件108。例如,z轴支撑件108的上部112包括大致呈圆形的形状,其对应于探针支撑臂102和外梭104中的每一个中的大致呈圆形的开口。虽然示出了大致呈圆形的形状,但可将其他形状用于该系统100,其包括但不限于矩形、三角形、不规则形状等。探针支撑臂102可被通过相应结构之间的摩擦配合以及通过外梭104和被定位在z轴支撑件内的内梭106之间的磁耦合而相对于z轴支撑件108保持在适当位置。在实施方式中,探针支撑臂102和外梭104或其多个部分可被形成为单一结构。
25.系统100通过外梭104的受控定位和z轴支撑件108的旋转来控制由探针支撑臂102保持的样本探针的定位。例如,图1b示出了外梭104沿着z轴支撑件108(例如,沿着z轴114)的运动,其继而经由外梭104和内梭106之间的相互作用移动该探针支撑臂102。图1c示出了探针支撑臂102通过本文进一步描述的z轴支撑件108的旋转而进行的旋转运动。
26.参考图2,示出了根据本公开的示例性实施方式的系统100的横截面。z轴支撑件108被示出为具有限定内部容积202的外管200,内梭106被配置成穿过该内部容积202以影响外梭104的竖直运动。系统100可以通过包括但不限于具有推杆的线性致动器(例如,气动致动器)、花键螺杆或其组合的多种机构使内梭106在管200内移动。系统100在示例性实施方式中被示出为具有花键螺杆轨道204(例如,如在图2-5中所见)。花键螺杆轨道204包括被沿着z轴114定位的螺纹螺杆206,其中围绕螺杆206的一部分定位有结构轨道208。结构轨道208被固定地安装到基座,而螺杆206被可旋转地联接在管200内。例如,系统100可以包括第一驱动器(例如,图5中所示的滑轮驱动器500)以引起螺杆206在管200内的旋转运动。内梭106在内梭106的内表面上包括相应的螺纹以与螺杆206的螺纹配合。随着螺杆206被旋转地驱动,内梭106在管200内经由相应螺纹之间的相互作用沿着z轴114竖直地移动(例如,通过内部容积202)。作为选择或附加地,系统100包括气动致动器以在内部容积202内竖直地推动内梭106。在实施方式中,内梭106限定一个或多个孔隙以对应于结构轨道208的形状,使
得随着内梭106在管200内移动时,结构轨道208穿过内梭106的孔隙。例如,内梭106在图3的示例性实施例中被示出为具有
‘
c’形孔隙以符合
‘
c’形结构轨道208。
27.外梭104和内梭106各自包括一个或多个磁体以磁耦合相应的梭,使得当内梭106被(例如,经由花键螺杆轨道204和第一驱动器的操作、经由气动致动器的操作等)沿着z轴114驱动时,外梭104跟随沿着z轴支撑件108的外表面的相应的竖直运动。例如,内梭106被示出为具有被定位在内梭106的外部结构212内的两个磁体210。外部结构212可以包括但不限于被缠绕在内梭106的主体结构214周围的聚偏二氟乙烯(pvdf)材料。在实施方式中,主体结构214限定了与螺杆206的螺纹配合的对应螺纹。磁体210被示出为具有在中间具有孔隙的圆形或环形,其中,花键螺杆轨道204的结构可穿过该孔隙。例如,磁体210环绕z轴114,花键螺杆轨道204穿过磁体210的孔隙。内梭106被示出为具有被定位在磁体210之间的间隔结构216。外部结构212和主体结构214可以将每个磁体210推靠在间隔结构216上以控制磁体210之间的分离,以便在系统100的操作期间保持磁体210之间的基本均匀的距离。磁体210被对齐,使得相同的磁极彼此面对(例如,同一磁极与间隔结构216界接)。例如,图2示出了每个磁体210的北极彼此面对,其中,间隔结构216被定位在其间并且南极彼此远离定向。作为选择,磁体210的南极可以彼此面对,而北极被彼此远离定向。
28.外梭104包括用以与内梭106的磁体210相互作用的对应磁体。例如,外梭104被示出为具有被保持在主体结构220内的两个对应磁体218。与内梭106类似,外梭104可以包括被定位在主体结构220内的磁体218之间的间隔结构222。在实施方式中,主体结构220包括与底部226耦合的顶部224,在顶部224与底部226之间限定有空腔,以容纳磁体218和间隔结构222。顶部224和底部226可被固定在一起(例如,卡扣配合)以将磁体218置靠在间隔结构222上。磁体218被对齐使得相同的磁极彼此面对,其中,具有相反磁极的磁体218的磁极面对内梭106的相邻磁体210的磁极。例如,如图2中所示,磁体218的北极面对磁体210的南极(例如,管200位于其间),并且磁体218的南极面对磁体210的北极(例如,管200位于其间)。通过面对磁体210和磁体218的相反磁极,磁场将内梭106与外梭104耦合,使得内梭106的线性运动引起外梭104的相应线性运动。尽管系统100被示出为具有用于外梭104和内梭106中的每一个的两个磁体,但系统100并不限于两个磁体并且可以包括用于每个梭的更少或更多的磁体(例如,取决于两个磁体之间的期望吸引力)。
29.在实施方式中,管200在管200的外表面上限定表面特征以在管200旋转时促进外梭104的旋转运动。例如,管200被示出为具有沿管200的外表面纵向定向的多个花键300。外梭104在内表面上包括对应特征以与管200的表面特征配合。例如,外梭104被示出为具有与管200的花键300之间的间隙配合的对应花键302。管200的表面特征和外梭104的表面特征相互作用以将管200的旋转运动传递到外梭104,其又被传递到探针支撑结构102以使探针支撑结构102围绕z轴114旋转。在实施方式中,管200被通过第二驱动器(例如,图5中所示的滑轮驱动器502)的操作旋转以引起管200的旋转运动。例如,系统100可以包括被联接在固定驱动基座506与旋转驱动结构508之间的衬套504。旋转驱动结构508被联接到滑轮驱动器502以在滑轮驱动器502操作时围绕z轴114旋转。管200被联接到旋转驱动结构508以在滑轮驱动器502操作时相应地旋转,其又通过相应的表面特征(例如,花键300和302)的相互作用旋转外梭104以旋转该探针支撑结构102。
30.可以通过邻近z轴支撑件108的上部112定位主体结构220将外梭104安装到z轴支
撑件108上,其中,主体结构220的容置磁体218的端部228被定位成对应于主体结构214的容置磁体210的端部230,以允许内梭106和外梭104的相应磁场之间的相互作用磁耦合各个梭。当外梭104沿着z轴支撑件108定位时,外梭104的表面特征和管200的表面特征(例如,分别为花键302和300)可以彼此相邻滑动,直到磁体218与磁体210耦合为止。在实施方式中,系统100包括键结构,以在安装在z轴支撑件108上时将探针支撑结构102沿着预定方向定向,以出于标引(index)的目的通过管200的旋转提供由探针支撑结构102保持的探针的特定位置。例如,图6示出了限定键结构600(例如,具有比其他花键300大的截面积的花键)的管200,其中,外梭104限定了对应的键结构602(例如,用以接收键结构600的孔隙)。探针支撑结构102和外梭104还包括相应的键结构以提供探针支撑结构102相对于管200的期望方位。例如,外梭104被示出为包括键结构604,其中,探针支撑结构102包括对应的键结构606(例如,用以接收键结构604的孔隙)。在实施方式中,探针支撑结构102被可移除地联接到外梭104,使得不同的探针支撑结构102可以与外梭104联接。作为选择或附加地,不同的外梭可被定位在z轴支撑件108上以将不同类型的探针支撑结构引入到z轴支撑件上(例如,以有助于隔膜刺穿探针等)。
31.探针支撑结构102和外梭104可以包括锁定结构,以将探针支撑结构102相对于外梭104固定住。例如,外梭104在图8中被示出为在主体结构220的外表面802上限定凹槽800,该凹槽800的尺寸和大小被设计成用以接收被定位在探针支撑结构102的内表面806上的突起804(例如,图7中所示)。作为选择或附加地,探针支撑结构102可以限定凹槽并且外梭104可以限定对应的突起。在将探针支撑结构102安装到外梭104上期间,突起804可以与凹槽800配合,以在探针支撑结构102与外梭104之间提供锁定配合布置,以便相对于外梭104和z轴支撑件108牢固地保持住该探针支撑结构102。例如,凹槽800与突起804之间的相互作用可以经由克服探针支撑结构102与外梭104之间的纯摩擦配合的竖直力防止从外梭104上移除该探针支撑结构102。
32.在实施方式中,外梭104可以在外梭104的顶部限定接收该探针支撑结构102的节段。探针支撑结构102可以推靠在这些节段上,这又提供对z-轴支撑件108的管200的顺从配合,以提供外梭104和z轴支撑件108的牢固配合。例如,外梭104在图8中被示出为包括穿过外梭104的顶部810的多个竖向切口808,以将顶部810划分成多个节段812。当将探针支撑结构102引入到外梭104上时,探针支撑结构102可以向节段812上提供向内力,该力又可推靠在z轴支撑件(例如,在花键300上),以将外梭104固定就位。尽管图8示出了被划分成四个节段812的顶部810,但是本公开不限于这种布置。例如,顶部810可被划分为少于四个节段812、不止四个节段812、大小相等的节段812、大小不等的节段等。
33.结论
34.尽管已经以特定于结构特征和/或过程操作的语言描述了该主题,但将会明白的是,在所附权利要求中限定的主题不一定限于上述具体特征或动作。相反,上述具体特征和动作被公开为实施权利要求的示例形式。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。