1.本发明涉及通讯技术领域,且更确切地涉及一种环境侦测系统。
背景技术:
2.当前,人类社会要面对诸多由于自然灾害或人为因素所导致的突发性事件,比如面临火灾情况解救被困人员、遇到地震灾情进行现场救援、发生矿难进行井下救援、执行解救人质任务遭遇绑匪的攻击等。针对诸如此类的特殊情况,由于无法了解现场的具体情况,对于进入这些存在大量未知因素的危险区域进行现场救援,会给现场救援人员造成极大的生命安全威胁。
3.现有的环境侦测装置,可应用在所述应急场景中,能在狭小空间、密闭环境等不适合人进入的区域中进行图像、音频、视频、温度等环境信息的采集,并将采集的数据传输至外部的监控中心。由于环境侦测装置要进行持续地采集、侦测,因此要求其具备充足的电量,避免出现侦测过程中电力中断现象。
4.对球状传感器进行无线充电,就能有效延长电能的使用时间,给球状传感器提供充足的电量。该发明是引进一种球状传感器的无线充电方法,延长电能的使用时间。
技术实现要素:
5.针对上述问题,本发明公开一种环境侦测系统,能够进行网络服务器的部署,实现网络数据的分析与处理。
6.为了实现上述技术效果,本发明采用以下技术方案:
7.一种环境侦测系统,其特征在于:包括:
8.电源模块,用于提供其他模块的工作电压和电流,以保证其他模块处于正常工作状态;
9.摄像采集模块,所述摄像采集模块用于采集所述环境区域的影像视频和图片,将采集完的所述环境区域视频和图片传输给存储模块;
10.存储模块,所述存储模块用于保存摄像采集模块输出的图片和视频;
11.微处理器,所述微处理器用于分析、处理和判断存储器输入所述环境区域的视频和图片;
12.提示模块,所述提示模块包括语音警示模块和闪光模块,所述提示模块用于提示所述环境区域的人员,避免影响环境侦测装置的正常工作;
13.控制模块,所述控制模块接收微处理器的分析、处理和判断,并根据所述的微处理器处理的信息发出电信号向所述的紧急制动模块发出紧急制动信息;
14.运算模块,所述运算模块接收微处理器的分析、处理和判断,并根据所述的微处理器处理的信息发出电信号向所述的运算模块发出电信号;
15.紧急制动模块,所述紧急制动模块用于环境侦探装置侦测出紧急的情况时,紧急制动模块会接收控制模块发出的指令,使环境侦测装置停止工作;
16.距离监测模块,所述距离监测模块接收运算模块的电信号,用于监测障碍物与环境侦测装置之间的距离。
17.作为本发明进一步的技术方案,所述摄像采集模块采用智能摄像系统视频采集模块,所述智能摄像系统视频采集模块采用ad9883a芯片将摄像头视频和照片经过a/d转换器进行数字化处理,最后采用adv7123芯片将数字信号转化为模拟信号,将转化出的模拟信号输入到存储器,所述智能摄像系统视频采集模块设置有所述智能摄像系统视频采集模块设置有双向采集电路,所述双向采集电路运用采样脉冲shp和shd来对sgl与rsl进行采样,经过差分运放得到两者的差值。
18.作为本发明进一步的技术方案,所述存储器采用ddr4高速存储器,所述ddr4 高速存储器包括fpga芯片、ddr存储器芯片和时钟芯片,所述ddr4高速存储器通过fpga芯片实现存储器控制逻辑;把输出的电信号输入微控制器。
19.作为本发明进一步的技术方案,所述语音警示模块采用基于1760语音警示模块,所述1760语音警示模块包括麦克风前置扩大器,振荡器、isd1760芯片和内存;所述isd1760芯片利用spi总线实现域单片机通信,然后通过单片机将控制命令传送给isd1760芯片,实现对语音警示模块的控制。
20.作为本发明进一步的技术方案,所述控制模块采用远程自动化plc控制模块,所述远程自动化plc控制模块是接收并执行微处理器的指令,所述远程自动化plc控制模块同时将执行后的指令结果输出信号传送给紧急制动模块。
21.作为本发明进一步的技术方案,所述距离检测模块采用超声波模块进行测量距离,超声波模块工作方法为:
22.所述超声波检测距离发出的超声波遇到障碍物后会反射回超声波模块的接收端口,从发出到接收超声波的时间间隔来计算超声波发出端口到障碍物的距离,如公式1所示:
[0023][0024]
公式1中,c表示为超声波在空气传播的速度,d表示超声波模块的发出端口到障碍物的距离,δt表示为超声波从超声波模块的发出端口传播到障碍物返回所需要的时间。
[0025]
作为本发明进一步的技术方案,所述运算模块包括simd加法器、混合40 位加法器和漏斗移位器。
[0026]
作为本发明进一步的技术方案,所述紧急制动模块采用控制算法实现紧急控制,如公式(2)所示:
[0027][0028]
公式(2)中,d为环境侦测装置与自行移动的障碍物的距离,db表示为环境侦测装置制动安全距离,dw表示为环境侦测装置报警安全距离,ε表示环境侦测装置危险系数,b表示环境侦测装置的理想摩擦系数,w表示环境侦测装置与地面的摩擦系数,为了能够在紧急情况下环境侦测装置所需要的时间完成紧急制动,避免发生碰撞,通过设置环境侦测装置时间阈值实现,环境侦测装置时间阈值如公式(3)所示:
[0029][0030]
公式(3)中,ttc表示环境侦测装置时间阈值,dr表示为环境侦测装置与可移动的障碍物的纵向相对距离,r表示为环境侦测装置的半径,vr表示环境侦测装置与可移动的障碍物的纵向相对速度,定义报警发生的时间为环境侦测装置在相对速度ttw,环境侦测装置在相对速度如公式(4)所示:
[0031][0032]
公式(4)中,ttw表示为环境侦测装置在相对速度下,在1s的延迟后以-2m/s的速度制动域移动障碍物的相对速度为0的时间。
[0033]
本发明有益的积极效果在于:环境侦测装置便于将其应用到各种应用场景,尤其是工作人员不便于进入的内部空间场景,例如地震废墟内部、其他的一些狭小或者隐蔽的空间等等,距离监测模块与摄像采集模块的结合可以便于对狭小空间内部环境进行侦测,超声波装置获得的超声波定位数据可以进行精确定位,摄像采集模块拍摄得到的图像数据可以对周围环境进行观察,从而可以很好地实现环境侦测,尤其是狭小空间的环境侦测。
附图说明
[0034]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图,其中:
[0035]
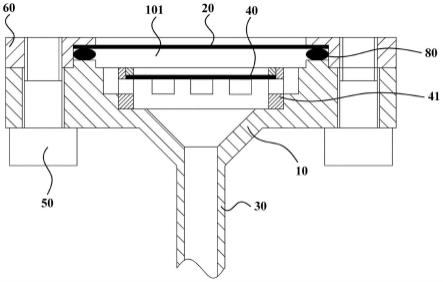
图1展示了一种环境侦测系统图;
[0036]
图2展示了一种环境侦测方法图;图3展示了一种环境侦测流程图。
具体实施方式
[0037]
以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的实施例仅用于说明和解释本发明,并不用于限定本发明;
[0038]
一种环境侦测系统,其特征在于:包括:
[0039]
电源模块,用于提供其他模块的工作电压和电流,以保证其他模块处于正常工作状态;所述电源模块采用dc/dc变换的电源,为摄像采集模块、存储模块、微处理器和提示模块正常提供电能。
[0040]
摄像采集模块,所述摄像采集模块用于采集所述环境区域的影像视频和图片,将采集完的所述环境区域视频和图片传输给存储模块;
[0041]
存储模块,所述存储模块用于保存摄像采集模块输出的图片和视频;所述存储模块采用永久记忆性存储器,所述永久记忆性存储器断电后仍能保存信息和运行程序、数据速度快和体积较小。
[0042]
微处理器,所述微处理器用于分析、处理和判断存储器输入所述环境区域的视频
和图片;所述微处理器将分析、处理和判断视频和图片的电信号输出给提示模块。
[0043]
提示模块,所述提示模块包括语音警示模块和闪光模块,所述提示模块用于提示所述环境区域的人员,避免影响环境侦测装置的正常工作。
[0044]
控制模块,所述控制模块接收微处理器的分析、处理和判断,并根据所述的微处理器处理的信息发出电信号向所述的紧急制动模块发出紧急制动信息;
[0045]
运算模块,所述运算模块接收微处理器的分析、处理和判断,并根据所述的微处理器处理的信息发出电信号向所述的运算模块发出电信号;
[0046]
紧急制动模块,所述紧急制动模块用于环境侦探装置侦测出紧急的情况时,紧急制动模块会接收控制模块发出的指令,使环境侦测装置停止工作;
[0047]
距离监测模块,所述距离监测模块接收运算模块的电信号,用于监测障碍物与环境侦测装置之间的距离。
[0048]
在具体实施例中,所述摄像采集模块采用智能摄像系统视频采集模块,所述智能摄像系统视频采集模块采用ad9883a芯片将摄像头视频和照片经过a/d转换器进行数字化处理,最后采用adv7123芯片将数字信号转化为模拟信号,将转化出的模拟信号输入到存储器,所述智能摄像系统视频采集模块设置有所述智能摄像系统视频采集模块设置有双向采集电路,所述双向采集电路运用采样脉冲shp 和shd来对sgl与rsl进行采样,经过差分运放得到两者的差值。
[0049]
在具体实施例中,所述存储器采用ddr4高速存储器,所述ddr4高速存储器包括fpga芯片、ddr存储器芯片和时钟芯片,所述ddr4高速存储器通过fpga 芯片实现存储器控制逻辑;把输出的电信号输入微控制器。
[0050]
在具体实施例中,所述语音警示模块采用基于1760语音警示模块,所述1760 语音警示模块包括麦克风前置扩大器,振荡器、isd1760芯片和内存;所述 isd1760芯片利用spi总线实现域单片机通信,然后通过单片机将控制命令传送给isd1760芯片,实现对语音警示模块的控制。
[0051]
在具体实施例中,所述控制模块采用远程自动化plc控制模块,所述远程自动化plc控制模块是接收并执行微处理器的指令,所述远程自动化plc控制模块同时将执行后的指令结果输出信号传送给紧急制动模块;所述远程自动化plc 控制模块工作过程包括内部处理、通信操作、输入处理、程序执行和输出处理;内部处理阶段是远程自动化plc控制模块检查微处理器是否正常,复位监视定时器;通讯操作是plc与微处理,更新编程器的显示内容,当plc处于停状态时,只进行内容处理和通讯操作内容;输入处理是将所有的输入端子的通断状态,并将读入的信息存在存储器里;程序执行,根据plc梯形图程序扫描原则,先左后右,先上后下的步序,逐句扫描,执行程序;输出处理是程序执行完后,通过隔离电路,驱动功率放大电路,将输出端子向外界输出控制信号,驱动紧急控制模块;运行工作模式是plc要进行从内部处理、通讯服务、输入处理、程序处理、输出处理的过程循环工作。
[0052]
在具体实施例中,所述距离检测模块采用超声波模块进行测量距离,超声波模块工作方法为:
[0053]
所述超声波检测距离发出的超声波遇到障碍物后会反射回超声波模块的接收端口,从发出到接收超声波的时间间隔来计算超声波发出端口到障碍物的距离,如公式1所示:
[0054][0055]
公式1中,c表示为超声波在空气传播的速度,d表示超声波模块的发出端口到障碍物的距离,δt表示为超声波从超声波模块的发出端口传播到障碍物返回所需要的时间。
[0056]
在具体实施例中,所述运算模块包括simd加法器、混合40位加法器和漏斗移位器。
[0057]
在具体实施例中,所述紧急制动模块采用控制算法实现紧急控制,如公式(2) 所示:
[0058][0059]
公式(2)中,d为环境侦测装置与自行移动的障碍物的距离,db表示为环境侦测装置制动安全距离,dw表示为环境侦测装置报警安全距离,ε表示环境侦测装置危险系数,b表示环境侦测装置的理想摩擦系数,w表示环境侦测装置与地面的摩擦系数,为了能够在紧急情况下环境侦测装置所需要的时间完成紧急制动,避免发生碰撞,通过设置环境侦测装置时间阈值实现,环境侦测装置时间阈值如公式(3)所示:其中当ε》1时,即d》dw,说明环境侦测装置处于安全状态,当1>ε>0时,即dw》d》db,则说明环境侦测装置和移动障碍物有可能发生碰撞,需要启动预警功能,当0>ε时,即db》d,说明环境侦测装置必须的制动才能避免发生碰撞。
[0060][0061]
公式(3)中,ttc表示环境侦测装置时间阈值,dr表示为环境侦测装置与可移动的障碍物的纵向相对距离,r表示为环境侦测装置的半径,vr表示环境侦测装置与可移动的障碍物的纵向相对速度,定义报警发生的时间为环境侦测装置在相对速度ttw,环境侦测装置在相对速度如公式(4)所示,:
[0062][0063]
公式(4)中,ttw表示为环境侦测装置在相对速度下,在1s的延迟后以-2m/s的速度制动域移动障碍物的相对速度为0的时间。环境侦测装置报警的条件为:当 ttc大于ttw时不报警,当ttc小于ttw时报警。
[0064]
虽然以上描述了本发明的具体实施方式,但是本领域的技术人员应当理解,这些具体实施方式仅是举例说明,本领域的技术人员在不脱离本发明的原理和实质的情况下,可以对上述方法和系统的细节进行各种省略、替换和改变;例如,合并上述方法步骤,从而按照实质相同的方法执行实质相同的功能以实现实质相同的结果则属于本发明的范围;因此,本发明的范围仅由所附权利要求书限定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。