1.本发明涉及雷达信号处理领域,特别是涉及一种多径效应下的雷达辅助估高方法。
背景技术:
2.在雷达测高算法的实际运用中,雷达在检测低空目标时,有时会受到多径效应的影响,接收机不仅接收来自目标反射的直接路径信号,还会接收到来自地面的反射信号,从而形成多径复合信号,导致传统比幅测高方法的测高结果波动较大且不稳定,可能测得多个高度结果。
3.因此需要一种多径效应下的雷达辅助估高方法,结合传统比幅测高方法的测高结果,通过分析两种测高结果之间最接近的目标高度值,获得多径效应下目标精确的高度信息。
技术实现要素:
4.针对多径效应下传统比幅测高方法的不足,本发明提供了一种多径效应下的雷达辅助估高方法,在多径效应下使用本算法结合传统比幅测高方法的测高结果,获得多径效应下目标精确的高度信息。
5.本发明的技术方案是:一种多径效应下的雷达辅助估高方法,其特征在于:包括如下步骤:
6.步骤1、根据公式计算出每个行线源不同高度的多径回波与直达波的波程差;
7.其中r为雷达探测到的目标距离;hr为雷达各行线源垂直高度;h
t
为预测的目标高度。
8.步骤2、根据公式a
理论
=(cos(2π(mod(δ0,λ)/λ)) 1)/2,计算各个行线源的理论回波幅度a
理论
;其中运算符mod(δ0,λ)返回的是δ0除以λ后的余数,λ为雷达波长。
9.步骤1和步骤2的有益效果是:考虑了多径效应造成雷达接收到的直达波和反射波的波程差对目标测高的影响。
10.步骤3、取各个行线源目标距离单元处的回波点复数值记为sig,根据公式sig
归一化
=abs(sig)/max(abs(sig)),计算各个行线源的目标距离单元处的实际回波幅度;
11.步骤4、计算理论回波幅度与实际回波幅度的相关性并归一化;
12.将sig
归一化
扩展为n行x列,n为雷达行线源数目,x为a
理论
的列数,每一列的数据与第一列相同,扩展后的矩阵记为a
实际
。
13.通过公式aa=1/sum(abs(a
实际-a
理论
))计算理论回波幅度与实际回波幅度的相关性,其中运算符sum(x)的含义为对矩阵x进行行方向上的求和,运算结果为1行向量。aa=1/sum(abs(a
实际-a
理论
))中的除法为点除,即求sum(abs(a
实际-a
理论
))结果中每个元素的倒数。
14.为了方便后续判断我们将相关性结果aa进行归一化处理,即aa
归一化
=aa/max(ab。
15.步骤5、结合归一化后的幅度相关性和传统比附测高结果确定目标的精确测高结果。
16.aa
归一化
中相关性最接近于1(相关性最高)的列,对应的预测目标高度h
t
的值,即为本算法测得的目标高度。
17.步骤5的有益效果是:通过理论幅度值与实际幅度值的相关性的比较,搜索不同目标高度对应的理论回波幅度值,找出与实际回波信号幅度值最接近的理论回波幅度值(即相关性最强),其对应的预测目标高度值即为测量的目标高度值。
18.本算法在某些情况下会出现测高模糊,即aa
归一化
中会出现多个相关性为1的列,此时需要结合传统比幅测高方法,选取与传统测高方法测高相近的结果。
19.此步骤的有益效果是:将本专利所述的估高方法结合比幅测高方法在多径效应影响下的结果,不仅可以去掉比幅测高方法在多径效应下的产生的错误估高结果,并且同时可以去掉本专利所述算法在某些情况下会出现测高模糊。即结合两种测高方法综合决策,获得更加精确可信的测高结果。
20.本发明的有益效果是:1.考虑了多径效应波程差对测高结果的影响,使得多径效应下的目标测高结果更加精确。2.结合考虑了传统比幅的测高结果,对本算法可能导致的测高模糊进行了筛选。
附图说明
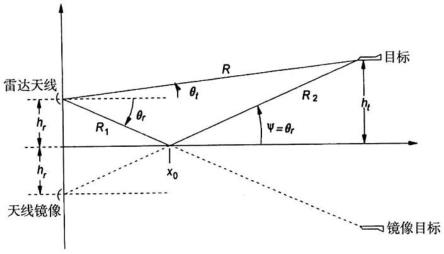
21.图1是本发明描述中所用变量符号的物理含义示意图。
22.图2是一种多径效应下的雷达辅助估高方法实现流程示意图。
具体实施方式
23.下面结合附图对本发明的实施例进行详细阐述,以使本发明的优点和特征能更易于被本领域技术人员理解,从而对本发明的保护范围做出更为清楚明确的界定。
24.本发明实施例提供了一种多径效应下的雷达辅助估高方法,可应用于雷达信号处理目标测高领域。
25.请参阅图2,一种相控阵雷达的干扰测向方法包括如下步骤:
26.步骤1、根据公式计算出每个行线源不同高度的多径回波与直达波的波程差。
27.其中r为雷达探测到的目标距离;hr为雷达各行线源垂直高度,本实施例中使用的行线源个数为30,所以hr有1列、30行;h
t
为预测的目标高度。
28.目标距离和雷达天线高度为实际测量值,预测的目标高度可使用0~测高指标最大值内每100m取一个预测高度,本实例中取值为1~12000每100m取一个预测高度,h
t
共有120个数,为行向量。
29.故计算出的波程差δ0为一个30行120列的矩阵。
30.步骤2、计算各个行线源的理论回波幅度a
理论
。
31.a
理论
=(cos(2π(mod(δ0,λ)/λ)) 1)/2,a
理论
为一个30行120列的矩阵,其中运算符
mod(δ0,λ)返回的是δ0除以λ后的余数,λ为雷达波长。
32.步骤3、计算各个行线源的目标距离单元处的实际回波幅度。
33.取各个行线源目标距离单元处的回波点复数值记为sig,是一个包含30个复数值的向量。将sig进行幅度归一化:sig
归一化
=abs(sig)/max(abs(sig)),sig
归一化
是一个30行1列的向量,其中运算符abs(x)的含义是对x进行求模值。
34.步骤4、计算理论回波幅度与实际回波幅度的相关性并归一化。
35.为了将不同预测高度的理论回波幅度与实际回波幅度进行相关性分析,将sig
归一化
扩展为30行120列,每一列的数据与第一列相同,扩展后的矩阵记为a
实际
。
36.通过公式aa=1/sum(abs(a
实际-a
理论
))计算理论回波幅度与实际回波幅度的相关性,其中运算符sum(x)的含义为对矩阵x进行行方向上的求和,运算结果为1行向量。aa=1/sum(abs(a
实际-a
理论
))中的除法为点除,即求sum(abs(a
实际-a
理论
))结果中每个元素的倒数。
37.为了方便后续判断将相关性结果aa进行归一化处理,即aa
归一化
=aa/max(abs(aa)),其中运算符max(x)的含义为取向量x中最大的元素值,aa
归一化
的结果为1行120列的向量。
38.步骤5、结合相关性aa
归一化
和传统比幅测高结果确定目标的精确测高结果。
39.aa
归一化
中相关性最接近于1(相关性最高)的列,其列序号对应的h
t
中元素的值,即为本算法测得的目标高度。
40.本算法在某些情况下会出现测高模糊,即aa
归一化
中会出现多个相关性为1的列,此时需要结合传统比幅测高方法,选取与传统测高方法测高相近的结果。
41.例如:本方法测得的相关性为1的高度值有和6000m、4500m;传统比幅测高方法测出的高度值为5500m、6100m、6700m,则选取测高结果为6000m。
42.以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。