背景技术:
1.可以通过测量车辆的各种特性来估计轮胎上的载荷。例如,可以使用基于车辆的高度传感器来估计车辆承载的载荷。然而,这些方法需要车辆特定的传感器,传感器必须针对车辆的特定的弹簧和部件进行校准。此外,使用这些车辆特定的传感器的载荷测量值以及基于这些载荷测量值的后续计算容易出现不准确。
技术实现要素:
2.在一些实施例中,一种用于使用来自轮胎安装传感器(tire mounted sensor,tms)的数据确定胎面深度的方法包括:基于由轮胎安装传感器收集的数据确定轮胎的轮胎变形;基于轮胎变形确定轮胎的有效滚动半径;以及至少基于轮胎的有效滚动半径确定轮胎的估计的胎面深度。
3.在一些实施例中,该方法还包括:基于轮胎的轮心的线速度和轮胎的车轮的角速度确定轮胎的滚动半径。在一些实施例中,该方法还包括:接收指示线速度和角速度的数据。在一些实施例中,线速度基于全球定位系统(gps)多普勒速度。在一些实施例中,角速度基于轮速传感器数据。在一些实施例中,确定轮胎的轮胎变形包括:基于径向加速度数据确定接地面长度。在一些实施例中,该方法还包括:接收一个或更多个参数;其中确定所估计的胎面深度还基于一个或更多个参数。在一些实施例中,一个或更多个参数包括:轮胎压力或一个或更多个轮胎刚度参数。在一些实施例中,该方法还包括:发送指示所估计的胎面深度的数据。在一些实施例中,发送指示所估计的胎面深度的数据包括:经由tms的收发器将指示所估计的胎面深度的数据发送至车辆控制系统(vcs)。
4.在一些实施例中,一种用于使用来自轮胎安装传感器(tms)的数据确定胎面深度的装置,该装置被配置为执行步骤,该步骤包括:基于由轮胎安装传感器收集的数据确定轮胎的轮胎变形;基于轮胎变形确定轮胎的有效滚动半径;以及至少基于轮胎的有效滚动半径确定轮胎的估计的胎面深度。
5.在一些实施例中,该步骤还包括:基于该轮胎的轮心的线速度和轮胎的车轮的角速度,确定轮胎的滚动半径。在一些实施例中,该步骤还包括:接收指示线速度和角速度的数据。在一些实施例中,线速度基于全球定位系统(gps)多普勒速度。在一些实施例中,角速度基于轮速传感器数据。在一些实施例中,确定轮胎的轮胎变形包括:基于径向加速度数据确定接地面长度。在一些实施例中,该步骤还包括:接收一个或更多个参数;其中确定所估计的胎面深度还基于一个或更多个参数。在一些实施例中,一个或更多个参数包括:轮胎压力或一个或更多个轮胎刚度参数。在一些实施例中,该步骤还包括:发送指示所估计的胎面深度的数据。在一些实施例中,发送指示所估计的胎面深度的数据包括:经由tms的收发器将指示所估计的胎面深度的数据发送至车辆控制系统(vcs)。
6.根据如在附图中所示的本发明的示例性实施例的以下更具体的描述,本发明的前
述和其他目的、特征以及优点将是显而易见的,其中相同的附图标记总体上表示本发明的示例性实施例的相同部分。
附图说明
7.图1阐述了根据本公开的用于使用来自轮胎安装传感器(tire mounted sensor,tms)的数据确定胎面深度的系统的框图;
8.图2示出了根据本公开的具有被配置用于确定胎面深度的tms的轮胎的框图;
9.图3示出了根据本公开的轮胎的参考图;
10.图4示出了根据本公开的示例性车辆控制系统的框图;
11.图5示出了根据本公开的示例性远程信息控制单元(telematics control unit,tcu)的另一框图;
12.图6示出了根据本公开的示例性tms的框图;
13.图7是根据本公开的用于使用来自tms的数据确定胎面深度的示例方法的流程图;
14.图8是根据本公开用于使用来自tms的数据确定胎面深度的示例方法的流程图;以及
15.图9是根据本公开的用于使用来自tms的数据确定胎面深度的示例方法的流程图。
具体实施方式
16.出于描述特定示例的目的,本文使用的术语不旨在对其他示例进行限制。无论何时使用诸如“一个”、“一种”和“该”的单数形式并且仅使用单个元件既不明确地也不隐含地被定义为是强制性的,其他示例还可以使用多个元件来实现相同的功能。同样地,当后续将功能描述为使用多个元件来实现时,进一步的示例可以使用单个元件或处理实体来实现相同的功能。将进一步理解的是,术语“包括”、“包含”、“囊括”和/或“具有”在使用时,指定所述特征、整体、步骤、操作、过程、动作、元件和/或部件的存在,但不排除一个或更多个其他特征、整体、步骤、操作、过程、动作、元件、部件和/或其任何组的存在或添加。
17.将理解的是,当一个元件被称为“连接”或“耦接”至另一个元件时,这些元件可以直接连接或耦接、或经由一个或更多个中间元件连接或耦接。如果两个元件a和b使用“或”来组合,则应理解为公开了所有可能的组合,即仅a、仅b以及a和b。相同组合的可替代措辞是“a和b中的至少一个”。这同样适用于两个以上元件的组合。
18.因此,尽管另外的示例能够进行各种修改和替代形式,但是其某些特定示例在附图中被示出并且随后将被详细描述。然而,该详细描述不将其他示例限制为所描述的特定形式。其他示例可以涵盖落入本公开的范围内的所有修改、等效物和替代方案。相同的标号在整个附图的描述中表示相同或相似的元件,当它们相互比较时可以同等地实施或以修改的形式实施,同时提供相同或相似的功能。
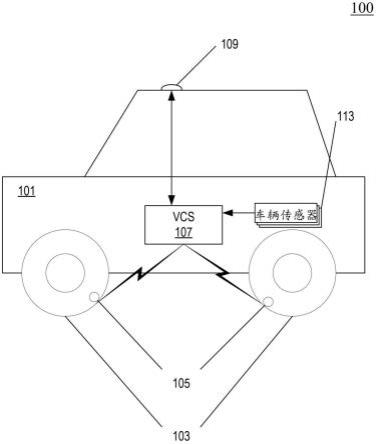
19.从图1开始,参考附图描述了根据本公开的用于使用来自轮胎安装传感器(tire mounted sensor,tms)的数据确定胎面深度的示例性方法、装置和计算机程序产品。图1阐述了根据本公开的实施例的使用来自轮胎安装传感器(tms)的数据确定胎面深度的系统(100)的示图。图1的系统包括:配备有轮胎(103)的车辆(101),轮胎(103)包括轮胎安装传感器(tms)(105)。虽然图1的实施例示出了均配备有tms(105)的两个轮胎,但应当理解的
是,车辆(101)的轮胎(103)中的少至一个和多至所有轮胎可以包括tms(105)。图1的车辆还包括:控制车辆内的各种部件和系统的车辆控制系统(vehicle control system,vcs)(107)。在特定实施例中,vcs(107)包括:被配置为控制一个或更多个车辆子系统的多个电子控制单元(electronic control unit,ecu)。通常被称为车辆的“计算机”,ecu可以是中央控制单元或者可以共同地指代一个或更多个车辆子系统控制单元,诸如发动机控制模块(engine control module,ecm)、动力传动系统控制模块(powertrain control module,pcm)、变速器控制模块(transmission control module,tcm)、制动控制模块(brake control module,bcm)、中央定时模块(central timing module,ctm)、通用电子模块(general electronic module,gem)、或悬架控制模块(suspension control module,scm)。在根据本公开的实施例中,vcs(107)包括bcm,该bcm包括防抱死制动系统(antilock braking system,abs)和电子稳定程序(electronic stability program,esp)。可替换地,vcs(107)可以包括:独立于基于车辆的传感器(例如,售后系统)的远程信息控制单元(telematics control unit,tcu)。
20.每个tms(105)配备有用于与vcs(107)进行双向无线通信的无线收发器,如将在下面更详细地描述。vcs类似地配备有用于与tms(105)中的每个进行双向无线通信的无线收发器,如将在下面更详细地描述。可以通过低功率通信技术(诸如,蓝牙低功耗)或旨在节省耗能的其他低功率双向通信技术来实现双向无线通信。可替代地,每个tms(105)可以包括:被配置为将信号发送至vcs(107)的单向发送器。
21.每个车辆系统可以包括:用于测量和传达车辆运行状况的传感器(113)。例如,abs可以包括:在用于测量轮速的轴距上的轮速传感器。esp子系统可以包括:偏航率传感器,该偏航率传感器被配置为在车辆正在转弯时测量车辆的偏航引起的加速度。可以将来自这些传感器(113)的读数提供给vcs(107),vcs(107)可以基于这些读数将参数提供给tms(105)。
22.车辆(101)可以进一步包括:收发器(109),收发器(109)通信地耦接至vcs(107)以用于蜂窝地面通信、卫星通信或两者。
23.构成图1中所示的示例性系统的设备的布置是用于解释而非限制。如本领域技术人员将想到的,根据本公开的各种实施例的有用的数据处理系统可以包括:未在图1中示出的附加服务器、路由器、其他设备和对等架构。这种数据处理系统中的网络可以支持许多数据通信协议,包括例如tcp(传输控制协议)、ip(互联网协议)、蓝牙协议、近场通信、控制器局域网(controllerarea network,can)协议以及本领域技术人员将会想到的其他协议。除了图1中示出的那些实施例,本公开的各种实施例可以在各种硬件平台上实施。
24.图2示出了具有tms(105)的轮胎的框图。通常,tms(105)安装在轮胎(103)的内表面或以其他方式耦接至轮胎(103)的内表面,特别是在胎面上方的轮胎的内衬上。当轮胎(103)旋转时,在任何给定时间与路面接合的部分被压扁。压扁部分被称为轮胎印痕,或可互换地被称为接地面。轮胎(103)的一个或更多个特征、特别是接地面的长度(通常在车辆的行驶方向上被测量),可以被用作例如轮胎(103)上载荷的指示。由tms(105)产生的电信号可用于测量接地面、特别是接地面长度,如将在下面更详细描述的。将理解的是,车辆(101)的轮胎(103)中的一个或更多个可以各自包括用于提供一个或更多个目标信号的tms(105),针对该目标信号执行脉冲宽度测量。
25.图3示出了根据本公开的轮胎(103)的参考图。如在本公开中所使用的,轮胎(103)
的z轴是旋转期间的径向力方向,轮胎的y轴是旋转期间的横向力方向,轮胎(103)的x轴是旋转期间的切向力方向。以弧度为单位的旋转角速度由ω表示,在本文中也称为轮速。
26.为了进一步解释,图4阐述了根据本公开的实施例的用于使用来自轮胎安装传感器(tms)的数据确定胎面深度的示例性车辆控制系统(vcs)(400)的示图。vcs(400)包括耦接至存储器(403)的控制器(401)。控制器(401)被配置为获得与车辆运行状况相关的传感器读数以及来自车辆外部来源的数据,并且将配置参数提供给tms(诸如tms(600)(见图6))。控制器可以包括或实现微控制器、专用集成电路(application specific integrated circuit,asic)、数字信号处理器(digital signal processor,dsp)、诸如现场可编程门阵列(fieldprogrammable gate array,fpga)的可编程逻辑阵列(programmable logic array,pla)或根据本公开的其他数据计算单元。传感器读数和数据以及从tms接收的轮胎特征数据可以被存储在存储器(403)中。存储器(403)可以是非易失性存储器,诸如闪存。例如,vcs(400)可以获得车辆运行状况数据,诸如来自车载传感器的传感器读数。
27.对于与tms的双向无线通信,vcs(400)包括耦接至控制器(401)的tms收发器(405)。在一个实施例中,tms收发器(405)是蓝牙低功耗发送器-接收器。在其他实施例中,tms收发器(405)可以是其他类型的旨在节省tms中耗能的低功率双向通信技术。vcs(400)还可以包括用于蜂窝地面通信、卫星通信或两者的收发器(407)。
28.vcs(400)可以进一步包括:控制器局域网(can)接口(409),该控制器局域网(can)接口(409)用于将车辆传感器和设备通信地耦接至控制器(401)。与本公开特别相关的是,can接口(409)将轮速传感器(411)、偏航率传感器(413)、倾斜传感器(415)和其他传感器(417)耦接至控制器(401)。轮速传感器(411)例如以弧度/秒为单位测量车轮的旋转角速度。偏航率传感器(413)可以用于测量车辆的偏航(例如当车辆转弯时)引起的加速度,这会影响每个轮胎上的载荷的大小。偏航率传感器(413)还可以提供关于轮胎接触路面处的轮胎上剪切力的信息。倾斜传感器(415)可以检测车辆的纵向和/或横向倾斜。轮速传感器(411)、偏航率传感器(413)和倾斜传感器(415)将各自的读数发送到控制器401。
29.控制器(401)被配置为从tms接收轮胎特征数据,例如以上描述的接地面长度(contact patch length,cpl)或峰值径向位移(peak radial displacement,prd)。基于轮胎特征数据,处理器被配置为计算轮胎载荷或补偿tms导出的车辆动力学/状况的载荷。在一些实施例中,控制器(401)可以被配置为在驾驶时基于从tms检索的数据来计算胎面深度。例如,控制器(401)可以经由tms收发器(405)从tms接收指示轮胎的cpl的数据。控制器(401)然后可以使用用于基于cpl和其他因素(例如轮胎压力、轮胎速度、轮胎温度等)确定载荷的所存储的特征方程来确定轮胎的载荷。例如,控制器(401)可以经由tms收发器(405)从tms或从其他传感器(例如,轮胎压力传感器等)接收指示这些其他因素的数据。
30.已经使用用于基于prd、轮胎变形或cpl确定载荷的所存储的特征方程来确定轮胎的载荷之后,控制器(401)然后可以基于轮胎的修改的滚动半径来确定轮胎的估计的胎面深度。轮胎的滚动半径可以表示为轮胎上的载荷、轮胎压力、轮胎刚度、胎面深度和轮胎速度的函数。因此,可以基于轮胎上的载荷(轮胎上的载荷本身可以基于包括轮胎压力、轮胎刚度和/或速度的因素)和轮胎的滚动半径来确定轮胎的胎面深度。轮胎刚度可以表示为一个或更多个轮胎刚度参数。例如,一个或更多个轮胎刚度参数可以包括用于轮胎刚度的多项式函数中的一个或更多个轮胎刚度系数。例如,可以使用转鼓试验机、平轨测试或轮胎模
拟来针对给定轮胎模型在变化的载荷和压力下确定一个或更多个轮胎刚度系数。一个或更多个轮胎刚度系数然后可以在制造时或在另一时间存储在轮胎的tms中。控制器(401)然后从tms(例如,经由tms收发器(405))接收轮胎的轮胎刚度系数。控制器401可以从tms、从安装在气门的压力传感器或从另一传感器接收指示轮胎压力的数据。
31.可以将轮胎的滚动半径计算为轮心的线速度与车轮的角速度之比。轮心的线速度可以基于全球定位系统(gps)多普勒数据。车轮的角速度可以基于来自轮速传感器(411)或tms的数据。例如,轮速传感器(411)可以是防抱死制动系统(abs)的部件。然后,控制器(401)基于指示车轮的线速度和车轮的角速度的数据来计算轮胎的滚动半径。
32.控制器(401)然后可以使用存储的特征方程来计算轮胎的胎面深度,该特征方程接受(根据cpl确定的)轮胎上的载荷、轮胎压力、轮胎刚度、速度和轮胎的滚动半径作为输入。控制器(401)可以被配置为响应于轮胎达到稳定的温度状态而计算胎面深度。例如,当车辆从冷起动开始行驶时,轮胎将升高温度直到达到稳定状态(例如,恒温,温度变化至低于阈值的程度)。tms可以向控制器(401)提供温度读数以允许控制器(401)确定已经达到稳定的温度状态。tms还可以确定已经达到稳定的温度状态并向控制器(401)发送信号。本领域的技术人员将认识到,可以从其他温度传感器(诸如,安装在车辆的外部空气温度传感器)接收温度数据。
33.虽然使用轮胎的cpl计算胎面深度被讨论为由控制器(401)确定,但是应当理解,上面阐述的计算和确定可以至少部分地由tms执行并提供给控制器(401)。此外,应当理解,峰值径向位移或另一个轮胎变形也可以被计算并且用于确定轮胎载荷,因此确定胎面深度。当基于轮胎特定的cpl(或其他变形)测量值来确定轮胎载荷时,胎面深度计算比使用车辆高度传感器或其他车辆相关测量值的其他方法更准确。
34.为了进一步解释,图5阐述了远程信息控制单元(tcu)(500)(例如,不直接耦接至基于车辆的传感器的售后系统)的实施例的示图。tcu(500)包括:控制器(501)、存储器(503)和tms收发器(505),它们执行与以上关于图4的vcs(400)描述的类似功能。tcu(500)还包括:全球定位系统(gps)接收器(557),该全球定位系统(gps)接收器(557)被配置为与一个或更多个gps卫星通信以便确定车辆位置、速度、移动方向等。tcu(500)还包括惯性测量单元(imu)(559),该惯性测量单元(imu)(559)被配置为使用加速度计、陀螺仪、和/或磁力计的组合来测量车辆的比力、角速率、和/或定向。tcu(500)还包括车载诊断(on-board diagnostics,obd)接口(561),该车载诊断(obd)接口(561)用于将tcu(500)耦接到车辆的一个或更多个车载诊断设备。tcu(500)可以经由可耦接至车辆电源总线的电源接口(563)接收电力。
35.在具体实施例中,tcu(500)的控制器(401)可以被配置为基于由tms收集的数据确定轮胎的轮胎变形。控制器(501)还可以被配置为:基于轮胎变形来确定轮胎的有效滚动半径;以及基于至少一个轮胎的有效滚动半径来确定轮胎的估计的胎面深度。
36.为了进一步解释,图6阐述了根据本公开的实施例的用于确定胎面深度的示例性tms(600)的示图。tms(600)包括处理器(601)。处理器可以包括或实现微控制器、专用集成电路(asic)、数字信号处理器(dsp)、诸如现场可编程门阵列(fpga)的可编程逻辑阵列(pla)或根据本公开的其他数据计算单元。
37.图6的tms(600)还包括:耦接至处理器(601)的存储器(603)。存储器可以存储信号
捕获配置参数(621)和从vcs(400)接收的其他数据。存储器(603)可以存储采样率的采样率表(622),每个采样率对应于特定参数值(例如,轮速或轮胎的旋转周期)。存储器(603)还可以存储窗函数的窗函数表(623),每个窗函数对应于特定参数值(例如,轮速或轮胎的旋转周期)。存储器(603)还可以存储滤波器频带的滤波器表(624),每个滤波器频带对应于特定参数值(例如,轮速或轮胎的旋转周期)。存储器(603)还可以存储加速度数据(625),该加速度数据(625)包括:由adc(611)从加速度计(607)采样的原始数字信号和由处理器(601)处理的经处理的加速度波形。存储器(603)还可以存储轮胎特征数据(626)(诸如,由处理器(601)提取的cpl或prd)。存储器(603)还可以存储fft或格兹尔(goertzel)算法配置(627)。
38.对于与vcs(400)的双向无线通信,图6的tms(600)包括耦接至处理器(601)的收发器(605)。在一个实施例中,收发器(605)是蓝牙低功耗发送器-接收器。在其他实施例中,收发器(605)可以是其他类型的旨在节省tms(600)中耗能的低能量双向通信技术。tms(600)经由收发器(605)将所提取的轮胎特征数据(诸如,加速度曲线、prd和cpl等)发送至vcs(400)。在替代实施例中,tms(600)包括:被配置为将数据发送至vcs(400)的单向发送器。
39.图6的加速度计(607)还可以是加速度传感器、加速度计设备、震动传感器、力传感器、微机电系统(microelectromechanical system,mem)传感器、或类似地响应于加速度幅值和/或加速度变化的其他设备。例如,加速度计感测径向平面(z平面)中的加速度,并且响应于感测到的加速度而输出电脉冲信号。在实施例中,加速度计(607)可以配置有加速度计范围、轮速参数或由vcs(400)提供的其他车辆参数。例如,重力偏移(g-offset)可以经由轮速传感器或另一车辆参数来确定,并且用于更快地捕获和处理信号。加速度计可以具有它们能够测量的可选择的力值范围。这些范围可以从
±
1g至
±
700g变化。加速度计的示例范围是
±
200g。可以基于轮速配置加速度计范围,例如,低速时
±
150g、中速时
±
250g和高速时
±
500g。典型地,范围越小,加速度计的读数将越灵敏。
40.图6的tms(600)还包括模数转换器(adc)(611),模数转换器(adc)(611)接收来自加速度计(607)的电脉冲信号并根据采样率对它们进行采样。adc(611)将从加速度计(607)接收的原始模拟信号转换为适合于数字信号处理的原始数字信号。可以经由来自轮速传感器的轮速或来自车辆传感器的另一车辆提供的参数来配置adc(611)的采样率。
41.图6的tms(600)还包括:电池(609),电池(609)连接至电源总线(未示出)以给收发器(605)、处理器(601)、adc(611)、加速度计(607)和存储器(603)供电。本领域的技术人员认为,tms(600)可以由作为电池(609)替代或补充的其他源(诸如能量收集器或其他电源)供电。
42.在一些实施例中,tms(600)可以被配置为在驾驶时计算胎面深度。例如,tms(600)可以基于来自加速度计(607)的数据确定轮胎的cpl。在该示例中,可以通过测量径向加速度返回至零g并处于零g的时间来估计cpl。然后将这个时间表示为用于完整旋转时间的商/比率,并且从cpl的已知轮胎周长的比率导出cpl。处理器(601)然后可以使用用于基于cpl和其他因素(诸如,轮胎压力、轮胎速度、轮胎温度等)确定载荷的所存储的特征方程来确定轮胎的载荷。例如,控制器(601)可以根据tms中的传感器计算这些其他因素,或者从vcs(400)接收如通过vcs(400)的其他传感器(417)测量的指示这些因素的数据,或者从其他传感器(例如,安装在气门的轮胎压力传感器等)接收指示这些因素的数据。
43.在使用用于基于cpl确定载荷的所存储的特征方程来确定轮胎的载荷之后,处理
器(601)然后可以使用特征方程来确定所估计的胎面深度,特征方程接受轮胎上的载荷、轮胎压力、轮胎刚度、速度和轮胎的滚动半径作为输入。轮胎刚度可以表示为存储在存储器(603)中的轮胎刚度参数(例如,表示为轮胎特征数据(626))。指示轮胎压力的数据可以从安装在气门的压力传感器接收或者由tms(600)确定。
44.可以将轮胎的滚动半径计算为轮心的线速度与车轮的角速度之比。tms(600)可以从vcs(400)接收指示车轮的线速度的数据(例如,基于gps多普勒数据)和指示车轮的角速度的数据(例如,基于来自vcs(400)的轮速传感器(411)的数据)。处理器(601)然后基于指示车轮的线速度和车轮的角速度的数据来计算轮胎的滚动半径。
45.处理器(601)然后可以使用所存储的特征方程来计算轮胎的胎面深度,该特征方程接受(根据cpl确定的)轮胎上的载荷、轮胎压力、轮胎刚度、速度和轮胎的滚动半径作为输入。处理器(601)可以被配置为响应于轮胎达到稳定的温度状态而计算胎面深度。tms(600)然后可以将所估计的胎面深度(例如,经由收发器(605))发送到vcs(400)。
46.虽然使用轮胎的cpl计算胎面深度被讨论为由tms(600)的处理器(601)确定,但是应理解,上面阐述的计算和确定可至少部分地由vcs(400)执行并提供给tms(600)。此外,应当理解,峰值径向位移或另一个轮胎变形也可以被计算并用于确定轮胎载荷,因此确定胎面深度。此外,虽然讨论了tms(600)与vcs(400)交互,但应理解,类似功能可以通过与tcu(500)通信来实现。
47.为了进一步解释,图7阐述了根据本公开的实施例的使用来自轮胎安装传感器(tms)的数据确定胎面深度的示例性方法的流程图,该方法包括:基于由轮胎安装传感器(tms)(600)所收集的数据(例如,通过tms(600)、通过vcs(400)的控制器(401)或tcu(500)的控制器(501))确定(702)轮胎的轮胎变形。轮胎变形可以包括:接地面长度(cpl)、峰值径向变形或可以理解的另一变形。tms(600)可以基于来自加速度计(607)的数据确定轮胎的轮胎变形。例如,可以通过测量径向加速度返回至零g并处于零g的时间来估计cpl。然后将这个时间表示为用于完整旋转时间的商/比率,并且从cpl的已知轮胎周长的比率导出cpl。基于由轮胎安装传感器(tms)(600)收集的数据确定(702)轮胎的轮胎变形可以通过以下执行:vcs的控制器或tcu的控制器接收从tms收集的数据或接收来自tms的轮胎变形。可选地,基于由轮胎安装传感器(tms)(600)收集的数据确定(702)轮胎的轮胎变形可以通过以下执行:tms基于由tms收集的数据计算轮胎变形。
48.图7的方法还包括:基于轮胎变形(例如,通过tms(600)、通过vcs(400)的控制器(401)、或tcu(500)的控制器(501))确定(704)轮胎的有效滚动半径。空载的轮胎的滚动半径从轮胎的周长导出。基于空载的轮胎的滚动半径和cpl(或诸如峰值径向变形的另一轮胎变形因素),确定轮胎的有效滚动半径(例如,载荷下轮胎的当前滚动半径)。
49.图7的方法还包括:基于轮胎的有效滚动半径(例如,通过tms(600)、通过vcs(400)的控制器(401)或tcu(500)的控制器(501))确定(706)轮胎的估计的胎面深度。例如,特征方程可以用于基于轮胎载荷和轮胎的有效滚动半径计算胎面深度。可以基于包括轮胎压力、轮胎速度、轮胎温度等的一个或更多个其他因素来确定轮胎载荷。例如,可以由tms(600)确定、由轮速传感器确定或以其他方式确定轮胎速度。因此,使用轮胎特定的变形(例如,cpl)和有效滚动半径来计算所确定的胎面深度,以提供载荷和胎面深度两者的更准确的确定。
50.为了进一步解释,图8是阐述根据本公开的实施例的用于使用来自轮胎安装传感器(tms)的数据确定胎面深度的示例性方法的流程图,该方法包括:基于由轮胎安装传感器(tms)(600)收集的数据确定(702)轮胎的轮胎变形;基于轮胎变形确定(704)轮胎的有效滚动半径;以及至少基于轮胎的有效滚动半径确定(706)轮胎的估计的胎面深度。
51.图8的方法与图7的不同之处在于,图8的方法还包括:基于轮胎的轮心的线速度和轮胎的车轮的角速度(例如,通过tms(600)、通过vcs(400)的控制器(401)、或tcu(500)的控制器(501))确定(802)轮胎的滚动半径。轮胎的滚动半径可以计算为轮心的线速度与车轮的角速度之比。轮心的线速度可以基于全球定位系统(gps)多普勒数据。车轮的角速度可以基于来自(vcs)的轮速传感器(411)的数据。tms(600)和/或控制器(401、501)可以接收指示车轮的线速度和车轮的角速度的数据并且计算轮胎的滚动半径。然后,所计算的轮胎的滚动半径可以用于确定轮胎的有效滚动半径。
52.为了进一步解释,图9阐述了根据本公开的实施例的用于使用来自轮胎安装传感器(tms)的数据确定胎面深度的示例性方法的流程图,该方法包括:基于由轮胎安装传感器(tms)(600)收集的数据确定(702)轮胎的轮胎变形;基于轮胎变形确定(704)轮胎的有效滚动半径;以及至少基于轮胎的有效滚动半径确定(706)轮胎的估计的胎面深度。
53.图9的方法与图7的不同之处在于,图9的方法还包括:(例如,通过tms(600)、通过vcs(400)的控制器(401)或tcu(500)的控制器(501))接收(902)一个或更多个轮胎参数。如上所述,轮胎的有效滚动半径可以表示为轮胎上的载荷和轮胎的胎面深度以及其他轮胎参数的函数。这样的其他参数可以包括:轮胎压力、轮胎刚度和/或速度。轮胎刚度可以表示为一个或更多个轮胎刚度参数。例如,一个或更多个轮胎刚度参数可以包括用于轮胎刚度的多项式函数中的一个或更多个轮胎刚度系数。例如,可以使用转鼓试验机、平轨测试或轮胎模拟来针对给定轮胎模型在变化的载荷和压力下确定一个或更多个轮胎刚度系数。一个或更多个轮胎刚度系数然后可以在制造时或在另一时间存储在轮胎的tms(600)的存储器(603)中。可以通过tms确定(600)轮胎压力。还可以通过安装在气门的压力传感器确定轮胎压力并将轮胎压力提供给tms(600)和/或vcs(400)的控制器(401)或tcu(500)的控制器(501)。
54.所接收的(902)一个或更多个参数(例如,轮胎压力、轮胎刚度和/或速度)然后可以用于确定(706)轮胎的估计的胎面深度。例如,除了估计的轮胎载荷和轮胎的滚动半径之外,用于计算轮胎的胎面深度的特征方程还可以接受轮胎压力、轮胎刚度和/或速度作为输入。
55.鉴于上述解释,读者将认识到根据本公开的实施例的使用来自轮胎安装传感器(tms)的数据确定胎面深度的益处包括但不限于:
56.·
与车辆特定的测量值比较,使用由轮胎安装传感器测量的轮胎特定的变形来计算轮胎的估计的载荷提供更准确的轮胎载荷估计。
57.·
与依赖于校准车辆特定的弹簧的载荷传感器的其他方法相比,使用轮胎安装传感器来计算轮胎的载荷和胎面深度使得接近车辆不可知。
58.·
使用轮胎变形的更准确的轮胎特定的估计来计算胎面深度,从而提供胎面深度的更准确的估计。
59.本发明的示例性实施例主要在用于使用来自轮胎安装传感器(tms)的数据确定胎
面深度的全功能计算机系统的背景中描述。然而,本领域技术人员将认识到,本发明还可以体现在计算机程序产品中,该计算机程序产品设置在计算机可读存储介质上以与任何合适的数据处理系统一起使用。这样的计算机可读存储介质可以是用于机器可读信息的任何存储介质,包括磁介质、光学介质或其他合适的介质。这种介质的示例包括硬盘驱动器或软盘中的磁盘、用于光驱动器的压缩盘、磁带以及本领域技术人员将想到的其他介质。本领域技术人员将立即认识到,具有合适编程装置的任何计算机系统将能够执行体现在计算机程序产品中的本发明方法的步骤。本领域技术人员还将认识到,尽管本说明书中描述的一些示例性实施例面向安装在计算机硬件上并在计算机硬件上执行的软件,然而,作为固件或硬件实现的替代实施例完全在本发明的范围内。
60.本发明可以是系统、装置、方法和/或计算机程序产品。计算机程序产品可以包括计算机可读存储介质(或媒介),该计算机可读存储介质(或媒介)上具有计算机可读程序指令,该计算机可读程序指令用于使处理器执行本发明的各方面。
61.计算机可读存储介质可以是能够保留和存储指令以供指令执行设备使用的有形设备。计算机可读存储介质可以例如是但不限于:电子存储设备、磁存储设备、光存储设备、电磁存储设备、半导体存储设备或前述的任何合适的组合。计算机可读存储介质的更具体示例的非详尽列表包括以下各项:便携式计算机软盘、硬盘、随机存取存储器(ram)、只读存储器(rom)、可擦除可编程只读存储器(eprom或闪存)、静态随机存取存储器(sram)、便携式光盘只读存储器(cd-rom)、数字多功能磁盘(dvd)、记忆棒、软盘、机械编码设备(诸如,记录有指令的穿孔卡或槽中的凸起结构)以及前述的任何合适的组合。如本文所用,计算机可读存储介质不应被解释为本身就是瞬态信号,例如无线电波或其他自由传播的电磁波、通过波导或其他传输介质传播的电磁波(例如,穿过光纤电缆的光脉冲)或通过电线传输的电信号。
62.本文描述的计算机可读程序指令可以从计算机可读存储介质下载到相应的计算/处理设备,或者经由网络(例如,互联网、局域网、广域网和/或无线网络)下载到外部计算机或外部存储设备。该网络可以包括铜传输电缆、光传输光纤、无线传输、路由器、防火墙、交换机、网关计算机和/或边缘服务器。每个计算/处理设备中的网络适配卡或网络接口从网络接收计算机可读程序指令并转发计算机可读程序指令以存储在相应计算/处理设备内的计算机可读存储介质中。
63.用于执行本发明的操作的计算机可读程序指令可以是汇编指令、指令集架构(instruction-set-architecture,isa)指令、机器指令、机器相关指令、微码、固件指令、状态设置数据或以一种或更多种编程语言(包括面向对象的编程语言(例如,smalltalk、c 等)以及传统的程序化编程语言(例如,“c”编程语言或类似的编程语言))的任何组合编写的源代码或目标代码。在一些实施例中,包括例如可编程逻辑电路、现场可编程门阵列(fpga)或可编程逻辑阵列(pla)的电子电路可以通过利用计算机可读程序指令的状态信息以个性化电子电路来执行计算机可读程序指令,从而执行本发明的各方面。
64.本文参考根据本发明实施例的方法、装置(系统)和计算机程序产品的流程图和/或框图来描述本发明的各方面。应当理解,流程图和/或框图的每个块、以及流程图和/或框图中的块的组合,可以通过计算机可读程序指令来实现。
65.可以将这些计算机可读程序指令提供给通用计算机、专用计算机或其他可编程数
据处理装置的处理器以产生机器,使得经由计算机或其他可编程数据处理装置的处理器执行的指令来创建用于实现流程图和/或框图的一个或更多个块中指定的功能/动作的手段。这些计算机可读程序指令也可以被存储在计算机可读存储介质中,该计算机可读存储介质可以指导计算机、可编程数据处理装置和/或其他设备以特定方式运行,使得存储有指令的计算机可读存储介质包括制品,该制品包括实现流程图和/或框图的一个或更多个块中指定的功能/动作的各方面的指令。
66.计算机可读程序指令也可以被加载到计算机、其他可编程数据处理装置或其他设备上,以使一系列操作步骤在计算机、其他可编程装置或其他设备上执行以产生计算机实现的过程,使得在计算机、其他可编程装置或其他设备上执行的指令实现流程图和/或框图的一个或更多个块中指定的功能/动作。
67.图中的流程图和框图示出了根据本发明的各种实施例的系统、装置、方法和计算机程序产品的可能实现的架构、功能和操作。就这一点而言,流程图或框图中的每个块可以表示模块、分段或指令的一部分,其包括用于实现指定逻辑功能的一个或更多个可执行指令。在一些替代实施方式中,块中标注的功能可能不按图中标注的顺序发生。例如,依据所涉及的功能,连续示出的两个块实际上可以基本上同时执行,或者这些块有时可以以相反的顺序执行。还应注意,框图和/或流程图示出的每个块、以及框图和/或流程图示出的块的组合,可以由执行指定功能或动作或执行专用硬件和计算机指令的组合的基于硬件的专用系统来实现。
68.本公开的优点和特征可以通过以下陈述进一步描述:
69.1.一种使用来自轮胎安装传感器(tms)的数据确定胎面深度的方法,该方法包括:基于由轮胎安装传感器收集的数据,确定轮胎的轮胎变形;基于轮胎变形确定轮胎的有效滚动半径;以及至少基于轮胎的有效滚动半径确定轮胎的估计的胎面深度。
70.2.根据陈述1的方法,还包括:基于轮胎的轮心的线速度和轮胎的车轮的角速度,确定轮胎的滚动半径。
71.3.根据陈述1或2的方法,还包括:接收指示线速度和角速度的数据。
72.4.根据陈述1-3中任一项的方法,其中,线速度基于全球定位系统(gps)多普勒速度。
73.5.根据陈述1-4中任一项的方法,其中,角速度基于轮速传感器数据。
74.6.根据陈述1-5中任一项的方法,其中,确定轮胎的轮胎变形包括:基于径向加速度数据确定接地面长度。
75.7.根据陈述1-6中任一项的方法,还包括:接收一个或更多个参数;其中,确定所估计的胎面深度还基于一个或更多个参数。
76.8.根据陈述1-7中任一项的方法,其中,所述一个或更多个参数包括:轮胎压力或一个或更多个轮胎刚度参数。
77.9.根据陈述1-8中任一项的方法,还包括:发送指示所估计的胎面深度的数据。
78.10.根据陈述1-9中任一项的方法,其中,发送包括:经由tms的收发器将指示所估计的胎面深度的数据发送到车辆控制系统(vcs),所述数据指示所估计的胎面深度。
79.11.一种用于使用来自轮胎安装传感器(tms)的数据确定胎面深度的装置,该装置被配置为执行步骤,该步骤包括:
80.基于由轮胎安装传感器收集的数据,确定轮胎的轮胎变形;
81.基于轮胎变形确定轮胎的有效滚动半径;以及
82.至少基于轮胎的有效滚动半径,确定轮胎的估计的胎面深度。
83.12.根据陈述11的装置,其中,该步骤还包括:基于轮胎的轮心的线速度和轮胎的车轮的角速度,确定轮胎的滚动半径。
84.13.根据陈述11或12的装置,其中,该步骤还包括:接收指示线速度和角速度的数据。
85.14.根据陈述11-13中任一项的装置,其中,线速度基于全球定位系统(gps)多普勒速度。
86.15.根据陈述11-14中任一项的装置,其中,角速度基于轮速传感器数据。
87.16.根据陈述11-15中任一项的装置,其中,确定轮胎的轮胎变形包括:基于径向加速度数据确定接地面长度。
88.17.根据陈述11-16中任一项的装置,其中,该步骤还包括:接收一个或更多个参数;其中,确定所估计的胎面深度还基于一个或更多个参数。
89.18.根据陈述11-17中任一项的装置,其中,一个或更多个参数包括:轮胎压力或一个或更多个轮胎刚度参数。
90.19.根据陈述11-18中任一项的装置,其中,该步骤还包括:发送指示所估计的胎面深度的数据。
91.20.根据陈述11-19中任一项的装置,其中,发送指示所估计的胎面深度的数据包括:经由tms的收发器将指示所估计的胎面深度的数据发送至车辆控制系统(vcs)。
92.可以在本文中借助于说明特定功能及其关系的性能的方法步骤来描述一个或更多个实施例。为了便于描述,本文中已经任意限定了这些功能构建块和方法步骤的边界和顺序。只要适当地执行指定的功能和关系,就可以限定可替换的边界和顺序。因此,任何这种可替换的边界或顺序都在权利要求书的范围和精神内。此外,为了便于描述,已经任意限定了这些功能构建块的边界。只要适当地执行某些重要的功能,就可以限定可替换的边界。类似地,流程图块也可以在本文中被任意限定以说明某些重要的功能。
93.就所使用的范围内,流程图块边界和顺序可以以其他方式限定,并且仍然执行某些重要的功能。因此,功能构建块和流程图块和顺序的这种可替换限定在权利要求的范围和精神内。本领域的普通技术人员还将认识到,本文中的功能构建块以及其他说明性块、模块和部件可以如图所示的那样来实现或者通过分立部件、专用集成电路、执行适当软件的处理器等来实现或其任意组合来实现。
94.虽然本文明确描述了一个或更多个实施例的各种功能和特征的特定组合,但这些特征和功能的其他组合同样是可能的。本公开不受本文公开的特定示例的限制,并且明确地结合这些其他组合。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。