1.本发明涉及振动控制技术领域,具体涉及转动惯性阻尼器控制半潜式平台垂向振动的装置及方法。
背景技术:
2.在所有能源类型中,海洋能源得到越来越多的关注。为了开发海洋能源,研究人员已经设计和建造了各种形式的浮力平台,如张力腿平台(tlp)、桁型平台和半潜式平台(ssp)等。在这些平台中,半潜式平台集合了许多优点,如更大的甲板面积和有效载荷容量,因此得到最广泛的应用。然而,半潜式平台由于吃水深度较浅和浮筒较大等问题,可能会发生过度位移,尤其是垂直振动,从而降低平台生产效率,危及平台结构完整性,甚至直接影响到相关工作人员的生命安全。因此,极其有必要改善半潜式平台在垂向的过度振动问题。对于控制半潜式平台垂向振动最常用的方法是在平台底部刚性安装固定垂振板(fhp),目的是增加平台的附加质量和阻尼。一般来说,通过引入固定垂振板,平台的阻力系数会明显提升。固定垂振板又分为实心型和多孔型,实心板在较大的keulegan-carpenter(kc)数下产生较高的阻尼,而多孔板在极低的kc数下产生较高的阻尼。除了传统的固定垂振板外,亦有调谐垂振板(thp)来缓解半潜式平台的垂向振动问题,其基于调谐质量阻尼器(tmd)的概念,调谐质量阻尼器是一种众所周知的控制系统,已广泛应用于减少多种振动源引起的结构振动。与固定垂振板中的刚性连接不同,调谐垂振板通过连接系统并联半潜式平台。基于此,半潜式平台的振动能量可以传递到调谐垂振板后被耗散。然而,调谐垂振板一般需要较大的板面尺寸,以实现垂振板和半潜式平台之间较大质量比,从而获得优异的控制性能。这会导致相应的成本增加和安装困难,致使调谐垂振板难以广泛应用。
技术实现要素:
3.本发明针对现有技术的不足,将惯性装置引入到波浪/风荷载作用下海洋平台的振动控制中。具体来说,将转动惯性阻尼器系统和半潜式平台组成联动系统,滚珠丝杠将半潜式平台的垂向直线运动转化为旋转管的高速转动,从而带动阻尼板的旋转,通过增大流体阻力给半潜式平台提供显著的阻尼效果;确定半潜式平台的垂振固有频率应落在波浪频率范围内的规则,确保两者在垂向发生共振,利用更小物理质量实现与固定/调谐垂振板相同甚至更好的控制效果;提出转动惯性阻尼器对半潜式平台垂向振动控制水平的非线性力学模型,通过波浪校准、自由振动测试、规则波和不规则波测试的方法进行验证。
4.本发明采用的技术方案是:
5.本发明转动惯性阻尼器控制半潜式平台垂向振动的装置,包括半潜式平台系统、锚泊系统、转动惯性阻尼器系统、水槽测试系统。所述半潜式平台系统与所述转动惯性阻尼器系统之间垂向连接,所述转动惯性阻尼器系统位于所述半潜式平台系统正下方;所述转动惯性阻尼器系统用于控制所述半潜式平台系统垂向振动;所述锚泊系统为所述半潜式平台系统与所述转动惯性阻尼器系统的固定提供支持,以防止所述半潜式平台系统在测试过
程中发生偏移。所述半潜式平台系统、转动惯性阻尼器系统和锚泊系统置于所述水槽测试系统的内部;所述水槽测试系统用于检验和测试所述转动惯性阻尼器系统控制所述半潜式平台系统垂向振动的有效性。
6.进一步地,所述半潜式平台系统包括工作甲板、浮力箱、连接立柱;连接立柱的上端连接工作甲板,下端连接浮力箱。工作甲板提供作业空间;浮力箱为半潜式平台系统提供稳定升力。
7.进一步地,所述转动惯性阻尼器系统包括上支撑板、上球铰链、上固定槽、张力传感器ⅰ、连接管ⅰ、转动阻尼板、旋转管、径向轴承、外筒、滚珠丝杠、连接管ⅱ、下球铰链、下固定槽、下支撑板;上支撑板上表面固定放置所述半潜式平台系统;上固定槽固接上支撑板;连接管ⅰ上端通过上球铰链铰接上固定槽;连接管ⅰ下端固接滚珠丝杠;滚珠丝杠置于旋转管内部;滚珠丝杠与旋转管内壁刚性接触;转动阻尼板固定于旋转管上;滚珠丝杠旋转带动旋转管和转动阻尼板转动;张力传感器ⅰ固定于连接管ⅰ上;张力传感器ⅰ用以测量连接管ⅰ的张力水平;旋转管置于外筒内部;旋转管通过径向轴承与外筒相固接;外筒起到保护转动惯性阻尼器系统的作用;连接管ⅱ上端固接外筒;连接管ⅱ下端通过下球铰链铰接下固定槽;下固定槽固接下支撑板。
8.进一步地,所述锚泊系统包括固定立杆、收缩器、张力传感器ⅱ、弹簧、v型定滑轮、弹性绳索、固定螺栓。收缩器、张力传感器ⅱ和弹簧从上向下依次垂直固定于弹性绳索上;收缩器改变弹性绳索中的张力水平;张力传感器ⅱ测试和记录弹性绳索的张力值;弹簧起到缓冲作用;弹性绳索绕过v型定滑轮;v型定滑轮改变弹性绳索走向;固定立杆起到支撑和稳定的作用;弹性绳索的一端固定在固定立杆上,弹性绳索另一端绕在固定螺栓上,固定螺栓固接在上支撑板的四个边角,上支撑板通过固定螺栓与浮力箱下端固接在一起。
9.进一步地,所述水槽测试系统包括水槽、波浪传感器ⅰ、波浪传感器ⅱ、光学相机;所述半潜式平台系统放置于水槽中间,波浪传感器ⅰ和波浪传感器ⅱ分别布置于所述半潜式平台系统正前方和正后方;波浪传感器ⅰ和波浪传感器ⅱ获取迎面波浪的周期、频率以及波高数据;光学相机布置于所述半潜式平台系统的侧面,即水槽边壁与所述半潜式平台系统之间;光学相机获取所述半潜式平台系统的六个自由度变化信息;波浪传感器ⅰ、波浪传感器ⅱ和光学相机固定于水槽底床,与其他组件不连接;所述转动惯性阻尼器系统的下支撑板固接于水槽底床;所述锚泊系统的固定立杆和v型定滑轮固接于水槽底床且紧贴水槽边壁。
10.进一步地,所述半潜式平台系统具体的尺寸根据水槽尺寸及工作甲板、浮力箱、连接立柱缩放比例来确定。
11.进一步地,所述半潜式平台系统由硬质材料制成,视作有六个自由度的刚体;所述半潜式平台系统放置于水槽的纵向中轴线上,以减少水槽实验过程中反射波的影响;水槽中波浪的入射方向需沿水槽纵向,以保证波浪入射方向与半潜式平台系统间的夹角为0
°
。
12.进一步地,所述锚泊系统包含四根弹性绳索,每根弹性绳索之间夹角为90
°
。
13.进一步地,所述锚泊系统上的收缩器可以在必要时候略微调整弹性绳索的初始长度以确保半潜式平台系统的稳定;所述v型滑轮以最大限度减少来自滑轮的附加摩擦力,从而在测试实验过程中忽略此处的摩擦损失。
14.所述转动惯性阻尼器系统和所述半潜式平台系统组成联动系统,所述转动惯性阻
尼器系统的滚珠丝杠将所述半潜式平台系统的垂向直线运动转化为旋转管的高速转动,从而带动转动阻尼板的旋转;转动阻尼板的旋转增强局部湍流水平,增大流体阻力为半潜式平台系统提供显著的阻尼效果,利用更小的物理质量实现与固定/调谐垂振板相同甚至更好的控制效果。
15.本发明转动惯性阻尼器控制半潜式平台系统垂向振动的方法,包括以下步骤:
16.s1,准备结构组件:将光学相机、波浪传感器ⅰ、波浪传感器ⅱ、固定立杆、下支撑板固定于水槽底床;下固定槽固定于下支撑板上;将所述转动惯性阻尼器系统的下球铰链铰接下固定槽;将所述半潜式平台系统通过上球铰链、上支撑板和上固定槽来连接转动惯性阻尼器系统;通过弹性绳索连接固定立杆和半潜式平台系统;弹性绳索上布置好收缩器、张力传感器ⅱ、弹簧;开启光学相机、波浪传感器ⅰ、波浪传感器ⅱ、张力传感器ⅰ、张力传感器ⅱ、收缩器;略微调整弹性绳索的初始长度以确保半潜式平台系统的稳定;
17.s2,自由振动测试:水槽中释放均匀恒定水流,张力传感器ⅰ获取稳定流场条件下张力值的时间序列,对张力值的时间序列进行傅里叶频谱分析,确定半潜式平台系统的固有周期频率;
18.s3,波浪校准:利用外部造波机制造规则波浪,波浪传感器ⅰ、波浪传感器ⅱ获取波高数据,张力传感器ⅱ获取周期数据,将获取的数据与外部造波机的设置对比,以确保生成波浪的准确性;
19.s4,规则波测试:生成规则波,规则波的变量为波高和频率,规则波波高至少设计2种,频率至少设计5种;波浪传感器ⅰ、波浪传感器ⅱ、张力传感器ⅰ、张力传感器ⅱ、光学相机同步获取数据集;
20.s5,不规则波测试:生成不规则波,不规则波的生成需满足公式(1):
[0021][0022]
其中,s(ω)是功率谱密度(psd)函数;
[0023]hs
是有效波高;
[0024]
ω是波浪频率;
[0025]
ω0是波峰频率;
[0026]
γw是峰值因子;
[0027]
τ是形状参数;
[0028][0029]
波浪传感器ⅰ、波浪传感器ⅱ、张力传感器ⅰ、张力传感器ⅱ、光学相机同步获取数据集;
[0030]
s6,提出非线性力学模型:具体为提出和建立如公式(2)-(4)的非线性力学模型,
[0031]
[0032][0033][0034]
其中,f是转动惯性阻尼器施加给半潜式平台系统的阻力;
[0035]
n是转动阻尼板的数量;
[0036]
me是惯性力;
[0037]
mi是由原始结构质量和惯性矩引起的等效质量;
[0038]
是相对加速度;
[0039]
是相对速度;
[0040]ce
是阻尼系数;
[0041]
fc是库仑摩擦系数;
[0042]cv
是粘性摩擦系数;
[0043]
sgn是signum函数;
[0044]
η是滚珠丝杠的转换效率;
[0045]
l是滚珠丝杠的导程;
[0046]
ρ是水的密度;
[0047]cm
是惯性系数;
[0048]
ρs是转动阻尼板的密度;
[0049]
l
tp
是转动阻尼板的宽度;
[0050]
t
tp
是转动阻尼板的厚度;
[0051]cd
是阻力系数;
[0052]
r1是转动阻尼板的外径;
[0053]
r0是转动阻尼板的内径;
[0054]
s7,验证非线性力学模型:利用s4和s5获取的波浪传感器ⅰ、波浪传感器ⅱ、张力传感器ⅰ、张力传感器ⅱ、光学相机同步数据集验证非线性力学模型,即公式(2)~(4)。
[0055]
进一步地,在步骤s4中,所述规则波的频率范围包含半潜式平台系统的垂振固有周期频率,以确保波浪和半潜式平台系统在垂向发生共振。
[0056]
进一步地,在步骤s5中,所述不规则波的平均频率范围包含半潜式平台系统的垂振固有周期频率,以确保不规则波浪和半潜式平台系统在垂向发生共振。
[0057]
本发明的有益效果:
[0058]
1、本发明装置结构巧妙,整体性好,装置成本低。
[0059]
2、巧妙地利用滚珠丝杠将半潜式平台系统的垂向直线运动转化为旋转管的高速转动,从而带动阻尼板的旋转,通过增强局部湍流水平来增大流体阻力,为半潜式平台系统提供显著的阻尼效果。
[0060]
3、确定半潜式平台系统的垂振固有频率应落在波浪频率范围内的规则,确保两者在垂向发生共振,以此利用更小的物理质量实现与固定/调谐垂振板相同甚至更好的控制
效果。
[0061]
4、提出转动惯性阻尼器对半潜式平台系统垂向振动控制水平的非线性力学模型,通过波浪校准、自由振动测试、规则波和不规则波方法进行验证。
附图说明
[0062]
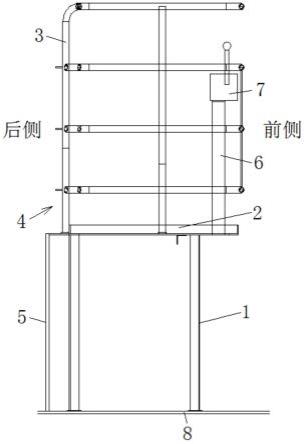
图1是发明装置的主视图;
[0063]
图2是本发明装置的俯视图;
[0064]
图3是本发明方法的流程图。
[0065]
图中:1.工作甲板,2.浮力箱,3.连接立柱,4.上支撑板,5.固定螺栓,6.上球铰链,7.上固定槽,8.张力传感器ⅰ,9.连接管ⅰ,10.转动阻尼板,11.旋转管,12.径向轴承,13.外筒,14.滚珠丝杠,15.连接管ⅱ,16.下球铰链,17.下固定槽,18.下支撑板,19.固定立杆,20.收缩器,21.张力传感器ⅱ,22.弹簧,23.v型定滑轮,24.弹性绳索,25.水槽,26.波浪传感器ⅰ,27.波浪传感器ⅱ,28.光学相机。
具体实施方式
[0066]
下面结合附图,对本发明进行进一步说明。
[0067]
如图1、图2所示,本发明转动惯性阻尼器控制半潜式平台系统垂向振动的装置包括半潜式平台系统、锚泊系统、转动惯性阻尼器系统、水槽测试系统。
[0068]
所述半潜式平台系统与所述转动惯性阻尼器系统之间垂向连接,即所述转动惯性阻尼器系统位于所述半潜式平台系统正下方;所述转动惯性阻尼器系统用于控制所述半潜式平台系统垂向振动;所述锚泊系统为所述半潜式平台系统与所述转动惯性阻尼器系统的固定提供支持,以防止所述半潜式平台系统在测试过程中发生偏移。所述半潜式平台系统、转动惯性阻尼器系统和锚泊系统位于所述水槽测试系统的内部;所述水槽测试系统用于检验和测试所述转动惯性阻尼器系统控制所述半潜式平台系统垂向振动的有效性。
[0069]
所述半潜式平台系统包括工作甲板1、浮力箱2、连接立柱3。连接立柱3的上端连接工作甲板1,下端连接浮力箱2。工作甲板1提供作业空间;浮力箱2为半潜式平台系统提供稳定升力。
[0070]
所述转动惯性阻尼器系统包括上支撑板4、上球铰链6、上固定槽7、张力传感器ⅰ8、连接管ⅰ9、转动阻尼板10、旋转管11、径向轴承12、外筒13、滚珠丝杠14、连接管ⅱ15、下球铰链16、下固定槽17、下支撑板18。上支撑板4上方固定放置所述半潜式平台系统;上固定槽7固接上支撑板4;连接管ⅰ9上端通过上球铰链6铰接上固定槽7;连接管ⅰ9下端固接滚珠丝杠14;滚珠丝杠14置于旋转管11内部;滚珠丝杠14与旋转管11内壁刚性接触;转动阻尼板10固定于旋转管11上;滚珠丝杠14旋转带动旋转管11和转动阻尼板10转动;张力传感器ⅰ8固定于连接管ⅰ9上;张力传感器ⅰ8用以测量连接管ⅰ9的张力水平;旋转管11置于外筒13内部;旋转管11通过径向轴承12与外筒13相固接;外筒13起到保护转动惯性阻尼器系统的作用;连接管ⅱ15上端固接外筒13;连接管ⅱ15下端通过下球铰16链铰接下固定槽17;下固定槽17固接下支撑板18。
[0071]
所述锚泊系统包括固定立杆19、收缩器20、张力传感器ⅱ21、弹簧22、v型定滑轮23、弹性绳索24、固定螺栓5。收缩器20、张力传感器ⅱ21和弹簧22从上往下依次垂直固定于
弹性绳索24上;收缩器20改变弹性绳索24中的张力水平;张力传感器ⅱ21测试和记录弹性绳索24的张力值;弹簧22起到缓冲作用;弹性绳索24绕过v型定滑轮23;v型定滑轮23改变弹性绳索24走向;固定立杆19起到支撑和稳定的作用;弹性绳索24的一端固定在固定立杆19上,弹性绳索24的另一端绕在固定螺栓5上,固定螺栓5固接在上支撑板4的四个边角。
[0072]
所述水槽测试系统包括水槽25、波浪传感器ⅰ26、波浪传感器ⅱ27、光学相机28;所述半潜式平台系统放置于水槽25中间,波浪传感器ⅰ26和波浪传感器ⅱ27分别布置于所述半潜式平台系统正前方和正后方;波浪传感器ⅰ26和波浪传感器ⅱ27获取迎面波浪的周期、频率以及波高数据;光学相机28布置于所述半潜式平台系统的侧面,即水槽25边壁与所述半潜式平台系统之间;光学相机28获取所述半潜式平台系统的六个自由度变化信息;波浪传感器ⅰ26、波浪传感器ⅱ27和光学相机28固定于水槽25底床,与其他组件不连接;所述转动惯性阻尼器系统的下支撑板18固接于水槽25底床;所述锚泊系统的固定立杆19和v型定滑轮23固接于水槽25底床且紧贴水槽25边壁。
[0073]
所述半潜式平台系统具体的尺寸根据水槽尺寸及工作甲板1、浮力箱2、连接立柱3缩放比例来确定。
[0074]
所述半潜式平台系统由硬质材料制成,视作有六个自由度的刚体;所述半潜式平台系统放置于水槽25纵向中轴线上,以减少水槽25实验过程中反射波的影响;水槽25中波浪的入射方向需沿水槽25纵向,以保证波浪入射方向与半潜式平台系统间的夹角为0
°
。
[0075]
所述锚泊系统包含四根弹性绳索24,每根弹性绳索24之间夹角为90
°
。
[0076]
所述锚泊系统上的收缩器20可以在必要时候略微调整弹性绳索24的初始长度以确保半潜式平台系统的稳定;v型滑轮23以最大限度减少来自滑轮的附加摩擦力,从而在测试实验过程中忽略此处的摩擦损失。
[0077]
所述转动惯性阻尼器系统和所述半潜式平台系统组成联动系统,所述转动惯性阻尼器系统的滚珠丝杠14将所述半潜式平台系统的垂向直线运动转化为旋转管11的高速转动,从而带动转动阻尼板10的旋转;转动阻尼板10的旋转增强局部湍流水平,增大流体阻力为半潜式平台系统提供显著的阻尼效果,利用更小的物理质量实现与固定/调谐垂振板相同甚至更好的控制效果。
[0078]
如图3所示,本发明转动惯性阻尼器控制半潜式平台系统垂向振动的方法,包括以下步骤:
[0079]
s1,准备结构组件:连接装置结构的组件,将光学相机28、波浪传感器ⅰ26、波浪传感器ⅱ27、固定立杆19、下支撑板18固定于水槽25底床;下固定槽17固定于下支撑板18上;将转动惯性阻尼器系统的下球铰链16铰接下固定槽17;将半潜式平台系统通过上球铰链6、上支撑板4和上固定槽7来连接转动惯性阻尼器系统;通过弹性绳索24连接固定立杆19和半潜式平台系统;弹性绳索24上布置好收缩器20、张力传感器ⅱ21、弹簧22;开启光学相机28、波浪传感器ⅰ26、波浪传感器ⅱ27、张力传感器ⅰ8、张力传感器ⅱ21、收缩器20;略微调整弹性绳索24的初始长度以确保半潜式平台系统的稳定。
[0080]
s2,自由振动测试:水槽25中释放均匀恒定水流,张力传感器ⅰ8获取稳定流场条件下张力值的时间序列,对张力值的时间序列进行傅里叶频谱分析,确定半潜式平台系统的固有周期频率。
[0081]
s3,波浪校准:利用外部造波机制造规则波浪,波浪传感器ⅰ26、波浪传感器ⅱ27获
取波高数据,张力传感器ⅱ21获取周期数据,将获取的数据与外部造波机的设置对比,以确保生成波浪的准确性。
[0082]
s4,规则波测试:生成规则波,规则波的变量为波高和频率,规则波波高至少设计2种,频率至少设计5种;为了更好地证明控制效果,要求半潜式平台系统的垂振固有周期频率应落在规则波的选定频率范围内,以确保波浪和半潜式平台系统在垂向发生共振。波浪传感器ⅰ26、波浪传感器ⅱ27、张力传感器ⅰ8、张力传感器ⅱ21、光学相机28同步获取数据集。
[0083]
s5,不规则波测试:生成不规则波,不规则波的生成需满足公式(1):
[0084][0085]
其中,s(ω)是功率谱密度(psd)函数;
[0086]hs
是有效波高;
[0087]
ω是波浪频率;
[0088]
ω0是波峰频率;
[0089]
γw是峰值因子;
[0090]
τ是形状参数;
[0091][0092]
为了更好地证明控制效果,要求半潜式平台系统的垂振固有周期频率应落在不规则波的平均频率范围内,以确保不规则波和半潜式平台系统在垂向发生共振。波浪传感器ⅰ26、波浪传感器ⅱ27、张力传感器ⅰ8、张力传感器ⅱ21、光学相机28同步获取数据集。
[0093]
s6,提出非线性力学模型:本发明提出和建立如公式(2)-(4)的非线性力学模型,
[0094][0095][0096][0097]
其中,f是转动惯性阻尼器施加给半潜式平台系统的阻力;
[0098]
n是转动阻尼板10的数量;
[0099]
me是惯性力;
[0100]
mi是由原始结构质量和惯性矩引起的等效质量;
[0101]
是相对加速度;
[0102]
是相对速度;
[0103]ce
是阻尼系数;
[0104]
fc是库仑摩擦系数;
[0105]cv
是粘性摩擦系数;
[0106]
sgn是signum函数;
[0107]
η是滚珠丝杠14的转换效率;
[0108]
l是滚珠丝杠14的导程;
[0109]
ρ是水的密度;
[0110]cm
是惯性系数;
[0111]
ρs是转动阻尼板10的密度;
[0112]
l
tp
是转动阻尼板10的宽度;
[0113]
t
tp
是转动阻尼板10的厚度;
[0114]cd
是阻力系数;
[0115]
r1是转动阻尼板10的外径;
[0116]
r0是转动阻尼板10的内径。
[0117]
s7,验证非线性力学模型:利用s4和s5获取的波浪传感器ⅰ26、波浪传感器ⅱ27、张力传感器ⅰ8、张力传感器ⅱ21、光学相机28同步数据集验证本发明提出的非线性力学模型,即公式(2)~(4)。
[0118]
在本发明的描述中,需要理解的是,基于附图所示关于方位或位置关系的术语,仅是为了便于描述本发明的简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定方位构造和操作,因此不能理解为对本发明的限制。
[0119]
在本发明中,除非另有明确的规定和限定,术语“设置”、“连接”等应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
[0120]
本发明在进行以上所述仅为本发明的优选实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书内容所作的等效结构变换,或直接或间接运用附属在其他相关产品的技术领域,均包括在本发明专利保护范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。