技术特征:
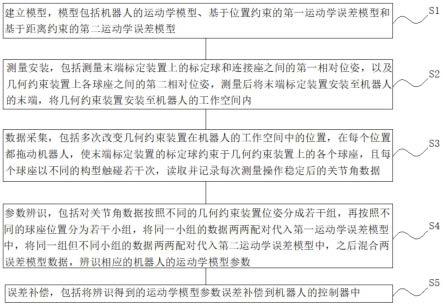
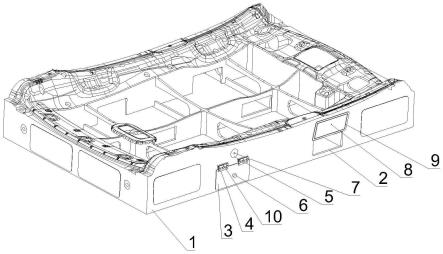
1.一种基于位置和距离约束的机器人标定方法,其特征在于:所述方法基于一机器人标定装置实现,所述机器人标定装置包括末端标定装置和几何约束装置,所述末端标定装置包括连接座和安装于连接座一端的标定球,所述几何约束装置包括约束支撑座和设置于所述约束支撑座上的多个球座,所述方法包括:s1,建立模型,所述模型包括机器人的运动学模型、基于位置约束的第一运动学误差模型和基于距离约束的第二运动学误差模型;s2,测量安装,包括测量所述末端标定装置上的所述标定球和所述连接座之间的第一相对位姿,以及所述几何约束装置上各球座之间的第二相对位姿,测量后将所述末端标定装置安装至所述机器人的末端,将所述几何约束装置安装至机器人的工作空间内;s3,数据采集,包括多次改变所述几何约束装置在机器人的所述工作空间中的位置,在每个位置都拖动机器人,使末端标定装置的标定球约束于几何约束装置上的各个球座,且每个球座以不同的构型触碰若干次,读取并记录每次测量操作稳定后的关节角数据;s4,参数辨识,包括对所述关节角数据按照不同的几何约束装置位姿分成若干组,再按照不同的球座位置分为若干小组,将同一小组的数据两两配对代入所述第一运动学误差模型中,将同一组但不同小组的数据两两配对代入所述第二运动学误差模型中,之后混合两误差模型数据,辨识相应的机器人的运动学模型参数;s5,误差补偿,包括将辨识得到的所述运动学模型参数误差补偿到机器人的控制器中。2.根据权利要求1所述的一种基于位置和距离约束的机器人标定方法,其特征在于:所述s1中,通过全局指数积公式建立机器人末端位姿与关节角、关节旋量和初始位姿之间的对应关系,构建所述运动学模型;通过伴随变换矩阵建立了位置约束误差与关节旋量误差、初始位姿误差之间的对应关系,构建所述第一运动学误差模型;通过伴随变换矩阵建立了距离约束误差与关节旋量误差、初始位姿误差之间的对应关系,构建所述第二运动学误差模型。3.根据权利要求2所述的一种基于位置和距离约束的机器人标定方法,其特征在于:所述全局指数积公式表示如下:其中,t
0,n 1
表示机器人末端位姿在基坐标系下的坐标,s
i
(i=1,2,...,n)表示机器人的关节旋量在基坐标系下的坐标,q
i
(i=1,2,...,n)表示机器人各关节的旋转角,即关节角,t
0,n 1
(0)表示机器人末端相对于基坐标系的初始位姿。4.根据权利要求3所述的一种基于位置和距离约束的机器人标定方法,其特征在于:所述第一运动学误差模型表示如下:y
pc
=a
pc
x;其中,表示两种不同构型下的末端位置误差,x表示待辨识的模型参数误差,a
pc
表示末端位置误差与模型参数误差之间的位置约束关系矩阵,所述a
pc
表示为:其中,p为名义末端位置坐标,i3表示3
×
3的单位矩阵,ad(
·
)表示一齐次变换矩阵所对
应的伴随变换矩阵,a
j
(j=1,2)表示为:(j=1,2)表示为:5.根据权利要求4所述的一种基于位置和距离约束的机器人标定方法,其特征在于:所述第二运动学误差模型表示如下:y
dc
=a
dc
x,;其中,表示两种不同构型下的名义末端距离与实际值之间的偏差,x表示待辨识的模型参数误差,a
dc
表示末端距离误差与模型参数误差之间的距离约束关系矩阵,所述a
dc
表示为:6.根据权利要求5所述的一种基于位置和距离约束的机器人标定方法,其特征在于:由所述第一运动学误差模型和第二运动学误差模型混合形成混合误差模型,所述混合误差模型表示为:y=ax;y=ax;其中,y为m1个末端位置误差与m2个末端距离误差组合而成的向量,a表示由m1个位置约束关系矩阵和m2个距离约束关系矩阵所组成的组合关系矩阵,m1和m2为大于等于1的整数。7.根据权利要求6所述的一种基于位置和距离约束的机器人标定方法,其特征在于:所述s4中,采用最小二乘法迭代对所述运动学模型参数误差进行辨识,所述最小二乘法公式表示为:x=(a
t
a)-1
a
t
y。8.根据权利要求1所述的一种基于位置和距离约束的机器人标定方法,其特征在于:所述s5中,采用直接补偿或间接补偿的方式将辨识得到的所述运动学模型参数误差补偿到机器人的控制器中。9.根据权利要求8所述的一种基于位置和距离约束的机器人标定方法,其特征在于:所述直接补偿方式包括直接修改所述控制器中的运动学模型参数。10.根据权利要求8所述的一种基于位置和距离约束的机器人标定方法,其特征在于:所述间接补偿方式包括通过辨识得到的所述运动学模型参数修正目标位姿,将修正后的所述目标位姿输入原控制器中,对原运动学模型进行误差补偿。
技术总结
本发明公开了一种基于位置和距离约束的机器人标定方法,包括建立机器人的运动学模型及基于位置约束和距离约束的运动学误差模型;将末端标定装置安装至机器人的末端,将几何约束装置安装至机器人的工作空间内;拖动机器人,使末端标定装置的标定球约束于几何约束装置上的各个球座,且每个球座以不同的构型触碰若干次,读取并记录每次测量的关节角数据;辨识相应的机器人的运动学模型参数;将辨识得到的运动学模型参数误差补偿到机器人的控制器中。本发明具有成本低廉、便携性好、操作简便、不易损坏等优点。不易损坏等优点。不易损坏等优点。
技术研发人员:杨桂林 何建辉 陈思鲁 罗竞波 万红宇 张志辉 汤烨 陈庆盈 张驰
受保护的技术使用者:中国科学院宁波材料技术与工程研究所
技术研发日:2022.08.15
技术公布日:2022/11/11
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。