1.本实用新型涉及起绒机的技术领域,尤其涉及一种九轴起绒机。
背景技术:
2.多轴起绒机一种常见的纺织设备,用于对布料表面的毛绒进行起绒,使布料表面的毛绒厚度更为均匀。现有的多轴起绒机包括有环绕其行星起绒机构设置的第一驱动装置、第二驱动装置和第三驱动装置,布料先绕过第一驱动装置的第一拖布辊后进入行星起绒机构,当布料绕过行星起绒机构行走一半圆弧路径后进入第二拖布装置,当布料绕过第二拖布装置的第二拖布辊后重新进入行星起绒机构,当布料绕过行星起绒机构行走另一半圆弧路径后进入第三拖布装置,布料绕过第三拖布装置的第三拖布辊后进入下一步工序。
3.为了使布料与行星起绒机构的接触较为充分而获得较好的起绒效果,现有的多轴起绒机是通过调节第一拖布辊、第二拖布辊、第三拖布辊各自的转动速度,使第一拖布辊、第二拖布辊、第三拖布辊相互之间存在一定的转速差,以此实现调节布料处于第一拖布辊与第二拖布辊之间、第二拖布辊与第三拖布辊之间的张紧力大小,在张紧力作用下使布料与行星起绒机构的接触更为充分。但由于调节拖布辊的转速是通过调节驱动其转动的电机输出功率实现的,而电机的运作存在一定惯性,使电机的输出功率的调节会存在一定延迟,使这种调节方式容易造成布料的张紧力的大小出现较大的波动,稳定性较差。
技术实现要素:
4.本实用新型的目的在于,提供一种九轴起绒机,具有张紧力大小的波动较小、稳定性较好等的优点。
5.本实用新型解决其技术问题所采用的技术方案是:一种九轴起绒机,包括有机体、行星起绒机构、拖布机构和主控模块;机体的长度方向为前后方向,机体的宽度方向为左右方向,机体的高度方向为上下方向;行星起绒机构可转动地安装在机体上,行星起绒机构的转动轴线沿左右方向设置;所述拖布机构包括有环绕行星起绒机构布设的第一拖布装置、第二拖布装置和第三拖布装置,第一拖布装置、第三拖布装置同时处于行星起绒机构的一侧,第二拖布装置处于行星起绒机构的另一侧;
6.第一拖布装置包括有第一拖布辊、第二拖布辊和2个第一活动组件;第一拖布辊可转动地安装在机体上,第一拖布辊的转动轴线沿左右方向设置;2个第一活动组件沿左右方向布设地安装在机体上,各第一活动组件的活动端均可沿垂直左右方向的方向上朝向第一拖布辊作伸缩动作;第二拖布辊的一端可转动地安装在其中一个第一活动组件的活动端上,第二拖布辊的另一端可转动地安装在另一个第一活动组件的活动端上,第二拖布辊的转动轴线沿左右方向设置;
7.第二拖布装置包括有第三拖布辊、第四拖布辊和2个第二活动组件;第三拖布辊可转动地安装在机体上,第三拖布辊的转动轴线沿左右方向设置;2个第二活动组件沿左右方向布设地安装在机体上,各第二活动组件的活动端均可沿垂直左右方向的方向上朝向第三
拖布辊作伸缩动作;第四拖布辊的一端可转动地安装在其中一个第二活动组件的活动端上,第四拖布辊的另一端可转动地安装在另一个第二活动组件的活动端上,第四拖布辊的转动轴线沿左右方向设置;
8.第三拖布装置包括有第五拖布辊和第六拖布辊,第五拖布辊、第六拖布辊均可转动地安装在机体上,第五拖布辊、第六拖布辊各自的转动轴线均沿左右方向设置;
9.所述主控模块与第一活动组件、第二活动组件电性连接。
10.本实用新型的工作原理:
11.在进行起绒处理时,布料经传输进入第一拖布装置,布料依次绕过第一拖布装置的第二拖布辊、第一拖布辊后进入行星起绒机构,布料在绕过行星起绒机构的其中一半圆弧路径后进入第二拖布装置,布料绕过第二拖布装置的第三拖布辊后重新进入行星起绒机构,布料在绕过行星起绒机构的另一半圆弧路径后进入第三拖布装置,布料依次绕过第三拖布装置的第五拖布辊、第六拖布辊后进入下一步工序。第一拖布辊与第二拖布辊之间、第三拖布辊与第四拖布辊之间均对布料进行夹压设置;通过控制第一活动组件带动第二拖布辊靠近或远离第一拖布辊,以此实现对布料处于第一拖布辊与第二拖布辊之间的压紧力进行调节;通过控制第二活动组件带动第四拖布辊靠近或远离第三拖布辊,以此实现对布料处于第三拖布辊与第四拖布辊之间的压紧力进行调节;通过控制布料处于第一拖布辊与第二拖布辊之间、处于第三拖布辊与第四拖布辊之间的压紧力大小,以此实现对布料处于第一拖布装置与第二拖布装置之间、处于第二拖布装置与第三拖布装置之间所产生的张紧力大小进行调节;由于这种通过夹压的调节方式不会因运动惯性而造成延迟,进而使张紧力的波动较小,稳定性较高。
12.进一步地,如前所述的一种九轴起绒机,第一活动组件包括有第一气缸、第一滑轨和第一滑动座,第一滑轨靠近第一拖布辊安装在机体上,第一滑轨的长度方向朝向第一拖布辊所在方向设置,第一滑动座可滑动地安装在第一滑轨上,第一气缸安装固定在机体上,第一气缸的活塞杆与第一滑动座连接固定,第一气缸的活塞杆可沿第一滑轨的长度方向作伸缩动作;所述第二拖布辊的一端可转动地安装在其中一个第一活动组件的第一滑动座上,第二拖布辊的另一端可转动地安装在另一个第一活动组件的第一滑动座上;第二活动组件包括有第二气缸、第二滑轨和第二滑动座,第二滑轨靠近第三拖布辊安装在机体上,第二滑轨的长度方向朝向第三拖布辊所在方向设置,第二滑动座可滑动地安装在第二滑轨上,第二气缸安装固定在机体上,第二气缸的活塞杆与第二滑动座连接固定,第二气缸的活塞杆可沿第二滑轨的长度方向作伸缩动作;所述第四拖布辊的一端可转动地安装在其中一个第二活动组件的第二滑动座上,第四拖布辊的另一端可转动地安装在另一个第二活动组件的第二滑动座上;所述主控模块与第一气缸、第二气缸电性连接。
13.进一步地,如前所述的一种九轴起绒机,在机体上还安装有第一张力传感器和第二张力传感器,第一张力传感器、第二张力传感器环绕行星起绒机构布设,且第一张力传感器、第二张力传感器均处于第二拖布装置与行星起绒机构之间;所述主控模块与第一张力传感器、第二张力传感器电性连接。
14.进一步地,如前所述的一种九轴起绒机,所述第一拖布辊、第二拖布辊、第三拖布辊、第四拖布辊均为胶辊,第五拖布辊、第六拖布辊均为刺皮辊。
15.进一步地,如前所述的一种九轴起绒机,机体上还安装有第一展布机构和第二展
布机构,所述第一拖布装置处于第一展布机构与行星起绒机构之间,第二展布机构处于第二拖布装置与行星起绒机构之间。
16.进一步地,如前所述的一种九轴起绒机,机体的前侧为进布侧,机体的后侧为出布侧;在机体上还安装有进布展布机构和进布对中机构,进布展布机构设置在机体的进布侧与进布对中机构之间,进布对中机构设置在进布展布机构与行星起绒机构之间。
17.进一步地,如前所述的一种九轴起绒机,所述行星起绒机构包括有9根起绒辊和2个行星轮,2个行星轮沿左右方向布设并可同轴转动地安装在机体上,行星轮的转动轴线沿左右方向设置;9根起绒辊环绕行星轮的转动轴线布设可转动地安装在2个行星轮之间,各起绒辊的转动轴线均沿左右方向设置。
18.进一步地,如前所述的一种九轴起绒机,还包括有吸尘机构,吸尘机构包括有若干设置在机体上的吸尘腔和负压装置,若干吸尘腔环绕行星起绒机构的转动轴线布设,各吸尘腔的腔口均朝向行星起绒机构设置,各吸尘腔均与负压装置的负压端连通,负压装置与主控模块电性连接。
19.进一步地,如前所述的一种九轴起绒机,还包括有清洁装置,清洁装置包括有箱体、2根清洁辊和清洁电机;箱体安装在机体上,所述第三拖布装置处于箱体与行星起绒机构之间,箱体内形成有清洁空间,箱体上形成有连通清洁空间的进布口和出布口;2根清洁辊均可转动地安装在清洁空间内,各清洁辊的转动轴线沿左右方向设置;清洁电机用于2根清洁辊进行转动,清洁电机与主控模块电性连接。
20.进一步地,如前所述的一种九轴起绒机,机体上还安装有驱动机构,驱动机构包括有起绒电机、第一拖布电机、第二拖布电机、第三拖布电机,起绒电机用于驱动行星起绒机构进行转动,第一拖布电机用于驱动第一拖布装置的第一拖布辊进行转动,第二拖布电机用于驱动第二拖布装置的第三拖布辊进行转动,第三拖布电机用于驱动第三拖布装置的第五拖布辊、第六拖布辊进行转动,起绒电机、第一拖布电机、第二拖布电机、第三拖布电机均为伺服电机;所述主控模块与起绒电机、第一拖布电机、第二拖布电机、第三拖布电机电性连接。
21.实现本实用新型的技术方案,具有以下的有益效果:本实用新型具有张紧力大小的波动较小、稳定性较好等的优点。
附图说明
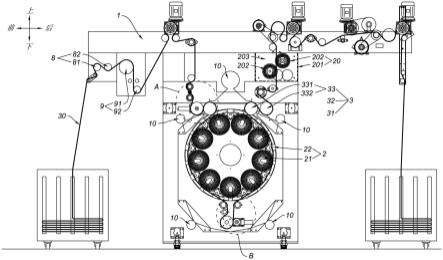
22.图1为实施例的结构示意图;
23.图2为图1的a处局部放大图;
24.图3为图1的b处局部放大图;
25.附图标记说明:
26.1-机体;2-行星起绒机构;21-起绒辊;22-行星轮;3-拖布机构;31-第一拖布装置;311-第一拖布辊;312-第二拖布辊;313-第一活动组件;314-第一滑轨;315-第一滑动座;32-第二拖布装置;321-第三拖布辊;322-第四拖布辊;323-第二活动组件;324-第二滑轨;325-第二滑动座;33-第三拖布装置;331-第五拖布辊;332-第六拖布辊;4-第一张力传感器;5-第二张力传感器;6-第一展布机构;61-第一展布辊;62-第二展布辊;7-第三展布辊;8-进布展布机构;81-第四展布辊;82-第五展布辊;9-进布对中机构;91-第一对中辊;92-第
二对中辊;10-吸尘腔;20-清洁装置;201-箱体;202-清洁辊;203-清洁空间;30-布料。
具体实施方式
27.为了对本实用新型的技术特征、目的和效果有更加清楚的理解,现对照附图详细说明本实用新型的具体实施方式。
28.如图1至图3所示为一种九轴起绒机,包括有机体1、行星起绒机构2、拖布机构3和主控模块(主控模块在附图中未示出);机体1的长度方向为前后方向,机体1的宽度方向为左右方向,机体1的高度方向为上下方向;行星起绒机构2可转动地安装在机体1上,行星起绒机构2的转动轴线沿左右方向设置;所述拖布机构3包括有环绕行星起绒机构2布设的第一拖布装置31、第二拖布装置32和第三拖布装置33,第一拖布装置31、第三拖布装置33同时处于行星起绒机构2的一侧,第二拖布装置32处于行星起绒机构2的另一侧;
29.第一拖布装置31包括有第一拖布辊311、第二拖布辊312和2个第一活动组件313;第一拖布辊311可转动地安装在机体1上,第一拖布辊311的转动轴线沿左右方向设置;2个第一活动组件313沿左右方向布设地安装在机体1上,各第一活动组件313的活动端均可沿垂直左右方向的方向上朝向第一拖布辊311作伸缩动作;第二拖布辊312的一端可转动地安装在其中一个第一活动组件313的活动端上,第二拖布辊312的另一端可转动地安装在另一个第一活动组件313的活动端上,第二拖布辊312的转动轴线沿左右方向设置;
30.第二拖布装置32包括有第三拖布辊321、第四拖布辊322和2个第二活动组件323;第三拖布辊321可转动地安装在机体1上,第三拖布辊321的转动轴线沿左右方向设置;2个第二活动组件323沿左右方向布设地安装在机体1上,各第二活动组件323的活动端均可沿垂直左右方向的方向上朝向第三拖布辊321作伸缩动作;第四拖布辊322的一端可转动地安装在其中一个第二活动组件323的活动端上,第四拖布辊322的另一端可转动地安装在另一个第二活动组件323的活动端上,第四拖布辊322的转动轴线沿左右方向设置;
31.第三拖布装置33包括有第五拖布辊331和第六拖布辊332,第五拖布辊331、第六拖布辊332均可转动地安装在机体1上,第五拖布辊331、第六拖布辊332各自的转动轴线均沿左右方向设置;
32.所述主控模块与第一活动组件313、第二活动组件323电性连接。
33.本实用新型的工作原理:
34.在进行起绒处理时,布料30经传输进入第一拖布装置31,布料30依次绕过第一拖布装置31的第二拖布辊312、第一拖布辊311后进入行星起绒机构2,布料30在绕过行星起绒机构2的其中一半圆弧路径后进入第二拖布装置32,布料30绕过第二拖布装置32的第三拖布辊321后重新进入行星起绒机构2,布料30在绕过行星起绒机构2的另一半圆弧路径后进入第三拖布装置33,布料30依次绕过第三拖布装置33的第五拖布辊331、第六拖布辊332后进入下一步工序。第一拖布辊311与第二拖布辊312之间、第三拖布辊321与第四拖布辊322之间均对布料30进行夹压设置;通过控制第一活动组件313带动第二拖布辊312靠近或远离第一拖布辊311,以此实现对布料30处于第一拖布辊311与第二拖布辊312之间的压紧力进行调节;通过控制第二活动组件323带动第四拖布辊322靠近或远离第三拖布辊321,以此实现对布料30处于第三拖布辊321与第四拖布辊322之间的压紧力进行调节;通过控制布料30处于第一拖布辊311与第二拖布辊312之间、处于第三拖布辊321与第四拖布辊322之间的压
紧力大小,以此实现对布料30处于第一拖布装置31与第二拖布装置32之间、处于第二拖布装置32与第三拖布装置33之间所产生的张紧力大小进行调节;由于这种通过夹压的调节方式不会因运动惯性而造成延迟,进而使张紧力的波动较小,稳定性较高。
35.如图2和图3所示,第一活动组件313包括有第一气缸(第一气缸在附图中未示出)、第一滑轨314和第一滑动座315,第一滑轨314靠近第一拖布辊311安装在机体1上,第一滑轨314的长度方向朝向第一拖布辊311所在方向设置,第一滑动座315可滑动地安装在第一滑轨314上,第一气缸安装固定在机体1上,第一气缸的活塞杆与第一滑动座315连接固定,第一气缸的活塞杆可沿第一滑轨314的长度方向作伸缩动作;所述第二拖布辊312的一端可转动地安装在其中一个第一活动组件313的第一滑动座315上,第二拖布辊312的另一端可转动地安装在另一个第一活动组件313的第一滑动座315上;以此可实现通过第一气缸的伸缩动作而带动第二拖布辊312靠近或远离第一拖布辊311运动,从而实现对布料30处于第一拖布辊311与第二拖布辊312之间的压紧力的大小进行调节。第二活动组件323包括有第二气缸(第二气缸在附图中未示出)、第二滑轨324和第二滑动座325,第二滑轨324靠近第三拖布辊321安装在机体1上,第二滑轨324的长度方向朝向第三拖布辊321所在方向设置,第二滑动座325可滑动地安装在第二滑轨324上,第二气缸安装固定在机体1上,第二气缸的活塞杆与第二滑动座325连接固定,第二气缸的活塞杆可沿第二滑轨324的长度方向作伸缩动作;所述第四拖布辊322的一端可转动地安装在其中一个第二活动组件323的第二滑动座325上,第四拖布辊322的另一端可转动地安装在另一个第二活动组件323的第二滑动座325上;以此可实现通过第二气缸的伸缩动作而带动第四拖布辊322靠近或远离第三拖布辊321运动,从而实现对布料30处于第三拖布辊321与第四拖布辊322之间的压紧力的大小进行调节。所述主控模块与第一气缸、第二气缸电性连接。这样的设计可使第一拖布装置31、第二拖布装置32对布料30的夹紧力的调节更为方便。
36.如图3所示,在机体1上还安装有第一张力传感器4和第二张力传感器5,第一张力传感器4、第二张力传感器5环绕行星起绒机构2布设,且第一张力传感器4、第二张力传感器5均处于第二拖布装置32与行星起绒机构2之间;所述主控模块与第一张力传感器4、第二张力传感器5电性连接。第一张力传感器4的作用在于对布料30处于第一拖布装置31与第二拖布装置32之间的张紧力大小进行测量,第二张力传感器5的作用在于对布料30处于第二拖布装置32与第三拖布装置33之间的张紧力大小进行测量,以此可实现对布料30的张紧力大小进行监测,并可通过主控模块控制第一气缸和第二气缸的伸缩状态实现对布料30的张紧力的大小进行自动控制,进而使布料30的张紧力保持在一定范围内。
37.所述第一拖布辊311、第二拖布辊312、第三拖布辊321、第四拖布辊322均为胶辊,第五拖布辊331、第六拖布辊332均为刺皮辊。第五拖布辊331、第六拖布辊332采用刺皮辊可增加其与布料30之间的摩擦力,有利于对布料30进行拖动传输。
38.如图2和图3所示,机体1上还安装有第一展布机构6和第二展布机构,所述第一拖布装置31处于第一展布机构6与行星起绒机构2之间,第二展布机构处于第二拖布装置32与行星起绒机构2之间。第一展布机构6包括有可转动地安装在机体1上的第一展布辊61和第二展布辊62,第二展布机构包括有可转动地安装在机体1上的第三展布辊7,第一展布辊61、第二展布辊62、第三展布辊7的转动轴线均沿左右方向设置。布料30在进入第一拖布装置31前先依次绕过第一展布辊61和第二展布辊62,布料30在进入第二拖布装置32前先绕过第三
展布辊7,这样的设计可使布料30在进入第一拖布装置31、第二拖布装置32前被展开,以此实现布料30与第一拖布辊311、第二拖布辊312、第三拖布辊321、第四拖布辊322之间的接触面积保持最大状态,进而提高第一拖布装置31、第二拖布装置32对布料30的夹紧效果。
39.如图1所示,机体1的前侧为进布侧,机体1的后侧为出布侧;在机体1上还安装有进布展布机构8和进布对中机构9,进布展布机构8设置在机体1的进布侧与进布对中机构9之间,进布对中机构9设置在进布展布机构8与行星起绒机构2之间。进布展布机构8包括有可转动地安装在机体1上的第四展布辊81和第五展布辊82,进布对中机构9包括有可转动地安装在机体1上的第一对中辊91和第二对中辊92,第四展布辊81、第五展布辊82、第一对中辊91、第二对中辊92的转动方向均沿左右方向设置。布料30从进布侧进入机体1后依次绕过第四展布辊81、第五展布辊82、第一对中辊91、第二对中辊92后进入下一步工序;与现有的布料30从进布侧进入机体1后直接进入对中机构的设计相比,这样的设计可使布料30在进入对中机构进行对中对齐调节前先经过进布展布机构8进行展开处理,进而使布料30与对中机构的第一对中辊91、第二对中辊92之间的接触面积较大,从而取得较好的对中对齐调节效果。
40.如图1所示,所述行星起绒机构2包括有9根起绒辊21和2个行星轮22,2个行星轮22沿左右方向布设并可同轴转动地安装在机体1上,行星轮22的转动轴线沿左右方向设置;9根起绒辊21环绕行星轮22的转动轴线布设可转动地安装在2个行星轮22之间,各起绒辊21的转动轴线均沿左右方向设置。通过设计9根起绒辊21,可使布料30与起绒机构的接触面积较大,并可布料30在起绒机构的行走路径更接近圆弧,有利于布料30进行传输。
41.如图1所示,本实施例还包括有吸尘机构,吸尘机构包括有若干设置在机体1上的吸尘腔10和负压装置(负压装置在附图中未示出),若干吸尘腔10环绕行星起绒机构2的转动轴线布设,各吸尘腔10的腔口均朝向行星起绒机构2设置,各吸尘腔10均与负压装置的负压端连通,负压装置与主控模块电性连接。这样的设计可使本九轴起绒机在工作时产生的毛屑被负压装置进行收集清理,以此减少本九轴起绒机在工作时所产生的扬尘。
42.如图1所示,本实施例还包括有清洁装置20,清洁装置20包括有箱体201、2根清洁辊202和清洁电机(清洁电机在附图中未示出);箱体201安装在机体1上,所述第三拖布装置33处于箱体201与行星起绒机构2之间,箱体201内形成有清洁空间203,箱体201上形成有连通清洁空间203的进布口和出布口;2根清洁辊202均可转动地安装在清洁空间203内,各清洁辊202的转动轴线沿左右方向设置;清洁电机用于2根清洁辊202进行转动,清洁电机与主控模块电性连接。布料30在经过起绒处理后从箱体201的进布口进入清洁空间203,然后布料30经过2根清洁辊202而对布料30表面残留的毛屑的进行清理,最后布料30从出布口离开清洁空间203进入下一步工序。这样的设计可避免布料30表面的毛屑对之后的工序造成影响,也无需在出料后对布料30再次进行清理以减少人工的劳动强度。
43.机体1上还安装有驱动机构,驱动机构包括有起绒电机、第一拖布电机、第二拖布电机、第三拖布电机(起绒电机、第一拖布电机、第二拖布电机、第三拖布电机在附图中未示出),起绒电机用于驱动行星起绒机构2进行转动,第一拖布电机用于驱动第一拖布装置31的第一拖布辊311进行转动,第二拖布电机用于驱动第二拖布装置32的第三拖布辊321进行转动,第三拖布电机用于驱动第三拖布装置33的第五拖布辊331、第六拖布辊332进行转动,起绒电机、第一拖布电机、第二拖布电机、第三拖布电机均为伺服电机;所述主控模块与起
绒电机、第一拖布电机、第二拖布电机、第三拖布电机电性连接。伺服电机响应速度快,使本九轴起绒机可实现快速启停,当出现异常情况时可通过快速停机而避免出现较为严重的后果,提高安全性。
44.以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改、组合和变化。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的权利要求范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。