技术特征:
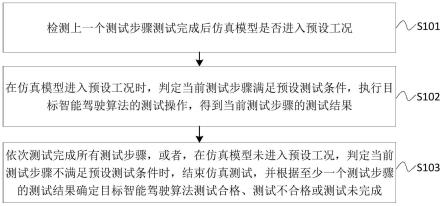
1.一种智能驾驶算法的仿真测试方法,其特征在于,包括以下步骤:检测上一个测试步骤测试完成后仿真模型是否进入预设工况;在所述仿真模型进入预设工况时,判定当前测试步骤满足预设测试条件,执行目标智能驾驶算法的测试操作,得到所述当前测试步骤的测试结果;依次测试完成所有测试步骤,或者,在所述仿真模型未进入预设工况,判定所述当前测试步骤不满足预设测试条件时,结束仿真测试,并根据至少一个测试步骤的测试结果确定所述目标智能驾驶算法测试合格、测试不合格或测试未完成。2.根据权利要求1所述的方法,其特征在于,所述根据至少一个测试步骤的测试结果确定所述目标智能驾驶算法测试合格、测试不合格或测试未完成,包括:检测任意测试步骤的测试结果是否满足预设合格条件;在任意测试步骤的测试结果不满足所述预设合格条件时,判定所述目标智能驾驶算法测试不合格,在任意测试步骤的测试结果满足所述预设合格条件时,检测所述测试步骤是否存在阻塞记录;如果不存在所述阻塞记录,则判定所述目标智能驾驶算法测试合格,如果存在所述阻塞记录,且识别最后一个测试步骤测试阻塞,则判定所述目标智能驾驶算法测试未完成,否则,判定所述目标智能驾驶算法测试不合格。3.根据权利要求1所述的方法,其特征在于,在判定所述当前测试步骤不满足预设测试条件时,结束仿真测试之前,包括:检测所述仿真模型未进入预设工况的持续时长;在所述持续时长大于预设时长时,判定所述当前测试步骤满足阻塞条件,并记录所述当前测试步骤测试阻塞,结束仿真测试,否则,继续判断所述当前测试步骤是否满足所述预设测试条件。4.根据权利要求1所述的方法,其特征在于,在检测上一个测试步骤测试完成后仿真模型是否进入预设工况之前,包括:检测所述仿真模型和所有关联子系统是否满足正常运行条件;如果满足所述正常运行条件,则判断所述当前测试步骤是否满足所述预设测试条件,否则,判定所述当前测试步骤测试阻塞,并结束仿真测试。5.根据权利要求1-4任意一项所述的方法,其特征在于,在执行第一个测试步骤的仿真测试之前,包括:获取目标智能驾驶算法的至少一个测试步骤信息,其中,每个测试步骤信息包括测试条件、执行操作和阻塞条件;根据所述至少一个测试步骤信息生成执行脚本,并基于所述执行脚本对所述目标智能驾驶算法按照测试步骤依次进行仿真测试,得到测试步骤对应的测试结果。6.一种智能驾驶算法的仿真测试装置,其特征在于,包括:第一检测模块,用于检测上一个测试步骤测试完成后仿真模型是否进入预设工况;第一判定模块,用于在所述仿真模型进入预设工况时,判定当前测试步骤满足预设测试条件,执行目标智能驾驶算法的测试操作,得到所述当前测试步骤的测试结果;测试模块,用于依次测试完成所有测试步骤,或者,在所述仿真模型未进入预设工况,判定所述当前测试步骤不满足预设测试条件时,结束仿真测试,并根据至少一个测试步骤
的测试结果确定所述目标智能驾驶算法测试合格、测试不合格或测试未完成。7.根据权利要求6所述的装置,其特征在于,所述测试模块,进一步用于:检测任意测试步骤的测试结果是否满足预设合格条件;在任意测试步骤的测试结果不满足所述预设合格条件时,判定所述目标智能驾驶算法测试不合格,在任意测试步骤的测试结果满足所述预设合格条件时,检测所述测试步骤是否存在阻塞记录;如果不存在所述阻塞记录,则判定所述目标智能驾驶算法测试合格,如果存在所述阻塞记录,且识别最后一个测试步骤测试阻塞,则判定所述目标智能驾驶算法测试未完成,否则,判定所述目标智能驾驶算法测试不合格。8.根据权利要求6所述的装置,其特征在于,在判定所述当前测试步骤不满足预设测试条件时,结束仿真测试之前,包括:第二检测模块,用于检测所述仿真模型未进入预设工况的持续时长;第二判定模块,用于在所述持续时长大于预设时长时,判定所述当前测试步骤满足阻塞条件,并记录所述当前测试步骤测试阻塞,结束仿真测试,否则,继续判断所述当前测试步骤是否满足所述预设测试条件。9.一种电子设备,其特征在于,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述程序,以实现如权利要求1-5任一项所述的智能驾驶算法的仿真测试方法。10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行,以用于实现如权利要求1-5任一项所述的智能驾驶算法的仿真测试方法。
技术总结
本申请涉及智能驾驶测试技术领域,特别涉及一种智能驾驶算法的仿真测试方法、装置、电子设备及介质,其中,方法包括:在检测到上一个测试步骤测试完成后仿真模型进入预设工况时,判定当前测试步骤满足预设测试条件,执行目标智能驾驶算法的测试操作,得到当前测试步骤的测试结果;依次测试完成所有测试步骤,或者,在仿真模型未进入预设工况,判定当前测试步骤不满足预设测试条件时,结束仿真测试,并根据至少一个测试步骤的测试结果确定目标智能驾驶算法测试合格、测试不合格或测试未完成。由此,解决了相关技术的测试方法会耗费大量资源进行场景仿真测试,对于敏捷开发而言,早期阶段并不适合大规模的场景覆盖验证等问题。并不适合大规模的场景覆盖验证等问题。并不适合大规模的场景覆盖验证等问题。
技术研发人员:涂文天 熊代斌 唐诚成 舒德伟
受保护的技术使用者:重庆长安汽车股份有限公司
技术研发日:2022.09.15
技术公布日:2022/11/11
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。