1.本发明涉及机器人系统技术领域,尤其涉及一种高性能移动机器人系统。
背景技术:
2.随着移动互联网、人工智能、物联网、大数据等新技术的快速发展,各种类型的机器人在人们的工作和生活中越来越普及,推动着社会的进步。智能移动机器人是一个集环境感知、动态决策与规划、行为控制与执行等多功能于一体的综合系统。它集中了传感器技术、信息处理、电子工程、计算机工程、自动化控制工程以及人工智能等多学科的研究成果,代表机电一体化的最高成就,是目前科学技术发展最活跃的领域之一。随着机器人性能不断地完善,移动机器人的应用范围大为扩展,不仅在工业、农业、医疗、服务等行业中得到广泛的应用,而且在城市安全、国防和空间探测领域等有害与危险场合得到很好的应用。
3.现有的工厂内的移动机器人是在完成一个相同的工作,移动机器人的数量可以显著地提升完成工作效率,但是单纯的增加移动机器人的数量而缺乏一个调度管理的系统,所以仍然会造成资源的浪费以及效率提升达不到想要的效果,因此提出了一种高性能移动机器人系统用于解决上述问题。
技术实现要素:
4.本发明的目的是为了解决现有技术中存在的缺点,而提出的一种高性能移动机器人系统。
5.为了实现上述目的,本发明采用了如下技术方案:一种高性能移动机器人系统,包括工控机、主mcu、从mcu、imu、驱动电路、无刷直流电机、霍尔传感器和隔离光耦;所述主mcu用于数据传递,将imu采集到的信息以一定频率反馈给工控机;所述工控机用于向机器人发布速度控制指令,并转化为从mcu能够接收的形式向其发布指令;所述从mcu用于驱动无刷直流电机,同时还将无刷直流电机的角位移回传给主mcu,使其能够转化成工控机能够接受的信息。
6.优选的,所述驱动电路选择具有专用电机驱动芯片来控制无刷直流电机的三相桥电路,专用电机驱动芯片上配置欠压和过流保护模块,且专用电机驱动芯片内部还集成有电子刹车模块和电子转向模块。
7.优选的,所述驱动电路选择具有专用电机驱动芯片来控制无刷直流电机的三相桥电路,具体过程包括:通过无刷直流电机采用的霍尔传感器进行测速;专用电机驱动芯片将同时接受来自与无刷直流电机同轴连接的霍尔传感器发出的脉冲信号,并将其传递给从mcu;从mcu将利用此脉冲信号计算无刷直流电机的实时转速,通过与给定的速度进行
比例-积分计算,以达到实时控制;从mcu把无刷直流电机转速反馈给主mcu,主mcu接受imu信息并与从mcu反馈信息一起处理,将移动机器人的里程信息和角度信息反馈至工控机。
8.优选的,所述从mcu与驱动电路之间通过隔离光耦相连接。
9.优选的,具体过程还包括:通过霍尔传感器发出的霍尔脉冲可以计算得到无刷直流电机的反馈的角速度其中:w
mf
为单侧无刷直流电机反馈的角速度;δt为接收霍尔脉冲的时间间隔;n为接受到霍尔脉冲的个数;p为无刷直流电机极对数;单侧车轮的线速度v
1t
与线位移d
1t
为:其中为无刷直流电机减速比,d为机器人车轮直径;主mcu计算得到的机器人在时间内的线速度vr,以及线位移dr为:主mcu已经接收完毕基于霍尔传感器信息的机器人线速度vr,以及线位移dr;主mcu将把机器人的线位移,线速度与从imu获得的角速度一起向工控机进行传输;工控机中的导航节点通常会给出期望的线速度,角速度对来实现对机器人的控制,通过线速度与角速度可以计算得到机器人所期望的左右车轮的转速:其中v
1c
,v
2c
分别为左右车轮预期的转速,dw为机器人的轮距。工控机通过串口写节点,将v
1c
,v
2c
的数值以及转向写入主控mcu中。
10.优选的,所述主mcu型号为stm32zet6。
11.优选的,所述从mcu型号为stm32c8t6。
12.优选的,所述无刷直流电机型号为jy01。
13.本发明的有益效果:(1)本发明提出的一种高性能移动机器人系统,该系统可以兼容多种传感器适用于多种场景的工作,采用低成本驱动芯片联合电桥和mcu做到双电机的实时控制,并向主mcu反馈实时轮速与航向信息,对传感器的兼容上可以外接深度相机,激光雷达等多种环境感知传感器实现实时的定位与导航;
(2)本发明提出的一种高性能移动机器人系统,嵌入式系统设计直接影响着移动机器人的运动性能指标,各传感器数据的回传速率,以及通讯的可靠性,移动机器人底层系统负责向建图,定位以及导航等模块提供机器人里程信息,并接受控制指令以达到对机器人的实际控制;(3)本发明提出的一种高性能移动机器人系统,移动机器人的嵌入式系统将机器人的决策,控制等算法与霍尔传感器,惯性原件(imu)和电机联系在一起以达到中间桥梁的作用,嵌入式系统的设计包括对机器人硬件的设计,运动控制算法,以及通讯逻辑的设计,以使机器人能够以给定的命令进行执行,并能将机器人内部传感器信息,如霍尔传感器,imu所采集的信息进行反馈以使机器人算法能够对机器人当前的位置进行大致感知。
14.本发明能够自动对机器人进行控制,完成整体数据的采集。
附图说明
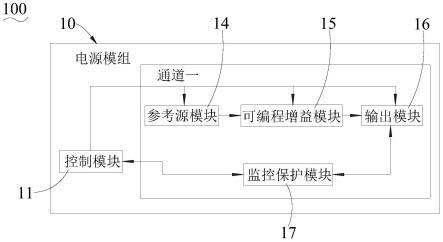
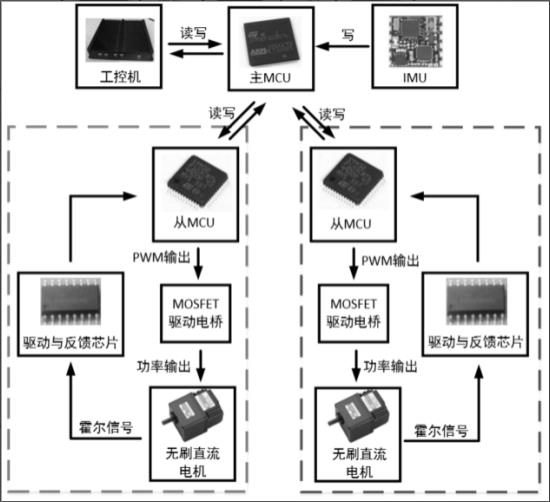
15.图1为本发明提出的一种高性能移动机器人系统的框图示意图;图2为本发明提出的一种高性能移动机器人系统中驱动电路部分的示意图;图3为本发明提出的一种高性能移动机器人系统的流程示意图。
具体实施方式
16.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
17.参照图1-3,一种高性能移动机器人系统,包括工控机、主mcu、从mcu、imu、驱动电路、无刷直流电机、霍尔传感器和隔离光耦;所述主mcu用于数据传递,将imu采集到的信息以一定频率反馈给工控机;所述工控机用于向机器人发布速度控制指令,并转化为从mcu能够接收的形式向其发布指令;所述从mcu用于驱动无刷直流电机,同时还将无刷直流电机的角位移回传给主mcu,使其能够转化成工控机能够接受的信息。
18.本发明中,所述驱动电路选择具有专用电机驱动芯片来控制无刷直流电机的三相桥电路,专用电机驱动芯片上配置欠压和过流保护模块,且专用电机驱动芯片内部还集成有电子刹车模块和电子转向模块。
19.本发明中,所述驱动电路选择具有专用电机驱动芯片来控制无刷直流电机的三相桥电路,具体过程包括:通过无刷直流电机采用的霍尔传感器进行测速;专用电机驱动芯片将同时接受来自与无刷直流电机同轴连接的霍尔传感器发出的脉冲信号,并将其传递给从mcu;从mcu将利用此脉冲信号计算无刷直流电机的实时转速,通过与给定的速度进行比例-积分计算,以达到实时控制;从mcu把无刷直流电机转速反馈给主mcu,主mcu接受imu信息并与从mcu反馈信息一起处理,将移动机器人的里程信息和角度信息反馈至工控机。
20.本发明中,所述从mcu与驱动电路之间通过隔离光耦相连接。
21.本发明中,具体过程还包括:从mcu接收来无刷直流电机的霍尔传感器的脉冲信号,并根据此脉冲信号计算单侧电机的转速,并与给定转速比较,通过pi计算输出相应的pwm波,同时也将脉冲信号的数量回传给主mcu计算单侧车轮的线转速与位移,通过霍尔传感器发出的霍尔脉冲可以计算得到无刷直流电机的反馈的角速度其中:w
mf
为单侧无刷直流电机反馈的角速度;δt为接收霍尔脉冲的时间间隔;n为接受到霍尔脉冲的个数;p为无刷直流电机极对数;单侧车轮的线速度v
1t
与线位移d
1t
为:其中为无刷直流电机减速比,d为机器人车轮直径;主mcu计算得到的机器人在时间内的线速度vr,以及线位移dr为:主mcu已经接收完毕基于霍尔传感器信息的机器人线速度vr,以及线位移dr;主mcu将把机器人的线位移,线速度与从imu获得的角速度一起向工控机进行传输;工控机采用机器人操作系统(ros),该系统能够方便得交换各节点之间的信息,工控机与主mcu采用串口通讯的方式交换数据,工控机读串口节点直接接收主mcu提供的线速度,线位移以及角速度,其他节点将处理读串口节点发布的信息以计算移动机器人的位姿。
22.工控机中的导航节点通常会给出期望的线速度,角速度对来实现对机器人的控制,通过线速度与角速度可以计算得到机器人所期望的左右车轮的转速:其中v
1c
,v
2c
分别为左右车轮预期的转速,dw为机器人的轮距。工控机通过串口写节点,将v
1c
,v
2c
的数值以及转向写入主控mcu中。
23.本发明中,所述主mcu型号为stm32zet6,所述从mcu型号为stm32c8t6,所述无刷直流电机型号为jy01。
24.本发明中,从mcu接收来无刷直流电机的霍尔传感器的脉冲信号,并根据此脉冲信号计算单侧电机的转速,并与给定转速比较,通过pi计算输出相应的pwm波,同时也将脉冲信号的数量回传给主mcu计算单侧车轮的线转速与位移,主mcu把机器人的线位移,线速度与从imu获得的角速度一起向工控机进行传输,从mcu是无刷直流电机驱动器的控制核心,控制器与驱动电路之间通过6n137高速光耦进行电气隔离,从mcu通过串口与主mcu进行通
讯,获得来自工控机的速度指令,向驱动电路发送对应占空比的pwm波、电子刹车和电子转向命令,jy01驱动芯片根据从mcu发送的命令对三相桥电路进行控制。
25.以上显示和描述了本发明的基本原理和主要特征和本发明的优点,对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
26.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。