1.本发明涉及取料技术领域,尤其涉及摆臂式交替取料机构。
背景技术:
2.包装机就是把产品包装起来的一类机器,起到保护,美观的作用,包装机主要分2个方面:流水线式整体生产包装与产品外围包装设备,流水线式整体生产包装,应用于食品、医药、日化、五金、灯饰、家具等行业的(袋装,瓶装)产品的灌装(添充)、封口机、打码,目前,传统连续包装机为一组摆臂机构带动一组取料装置完成连续取放料包装作业,同时,取料机构通过焊接固定不动,在对取出的物料过大时需要更换其他的包装设备,从而降低取料机构的灵活性,但是,在取料过程中需要多名操作人员一同完成取料作业,多名操作人员一同作业容易增加人工成本,且传统的包装机构体积庞大,造成空间的浪费。
技术实现要素:
3.针对现有技术中对于存在的上述问题,现提供摆臂式交替取料机构。
4.具体技术方案如下:
5.设计摆臂式交替取料机构,包括包装机主体和取料组件,所述包装机主体一侧固定连接有两个固定架,且所述两个固定架对称设置,所述两个固定架的上端均固定连接有横梁,所述横梁的一侧设置有伸缩电机,所述取料组件活动连接在所述横梁的一侧,所述取料组件与所述横梁相远离的一侧活动连接有支撑柱,所述支撑柱的下端设置有延伸感应臂,所述延伸感应臂的下端外部固定连接有固定柱,所述固定柱远离所述延伸感应臂的一侧设置有取料挡板。
6.优选的,所述支撑柱的一侧开设有横向贯穿的活动腔,所述支撑柱的下端开设有限位槽,所述限位槽与所述活动腔的内部相通,所述延伸感应臂活动连接在所述限位槽的内壁,所述活动腔的内部嵌合连接有与所述延伸感应臂相配合的位移传感器。
7.优选的,所述延伸感应臂位于所述限位槽内部的一端固定连接在所述位移传感器位于所述限位槽内部的一侧,且所述位移传感器与所述延伸感应臂呈t形状。
8.优选的,所述取料挡板的一侧固定连接有侧板,所述侧板远离所述取料挡板的一侧固定连接在所述固定柱的一端,所述取料挡板通过所述侧板固定连接在所述固定柱的一侧。
9.优选的,所述固定柱上端固定连接有限位柱,所述限位柱远离所述固定柱的一端滑动连接在所述位移传感器位于所述活动腔外侧一端。
10.优选的,所述伸缩电机固定连接在所述横梁的一侧,所述伸缩电机的一端转动贯穿所述横梁的内部,所述伸缩电机位于所述横梁内部的一端固定连接在所述取料组件的一侧。
11.优选的,所述支撑柱设置为两个,所述两个支撑柱对称连接在所述取料组件的一侧。
12.上述技术方案具有如下优点或有益效果:
13.1、通过设置伸缩电机配合取料组件与支撑柱,经由伸缩电机控制取料组件位于横梁的外侧左右滑动,当取料组件滑动对取料挡板与出料口进行匹配调节,由位移传感器位于限位槽内部滑动带动延伸感应臂向限位槽内部相靠近,且通过延伸感应臂向下延伸,对取料挡板与进料口角度进行微调,提升取料挡板与进料口调节的精准性,提升本装置的灵活性,增加本装置的实用性,通过取料挡板为对称设置,且便于物料位于取料挡板的下方交替取出,形成物料取出过程中快捷性,便于交替作业,达到物料取出的灵活性,降低人工成本节省人力,同时,本装置体积小,对空间合理化使用。
14.2、通过位移传感器位于限位槽内部横向移动,使其两个取料挡板相对滑动,且延伸感应臂位于限位槽内壁移动,通过延伸感应臂与限位槽内部贴合对其位移传感器移动位置最大程度进行调节,对位移传感器起到限位作用,通过延伸感应臂位于限位槽内部延伸对取料挡板的高度进行调节,形成对取料挡板在调节过程中精准性,便于物料进行取料,避免了在取料过程中物料发生偏移造成物料损坏,形成取料挡板对物料取出的灵活性,便于对不同大小的物料进行取出作业。
附图说明
15.参考所附附图,以更加充分的描述本发明的实施例。然而,所附附图仅用于说明和阐述,并不构成对本发明范围的限制。
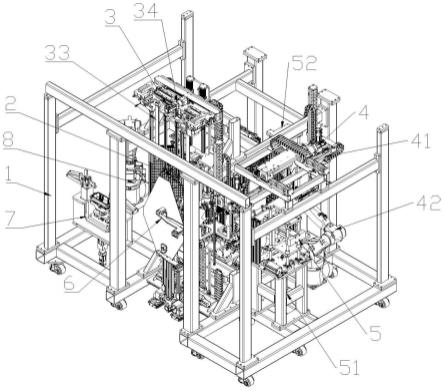
16.图1为本发明提出的摆臂式交替取料机构的立体结构示意图;
17.图2为本发明提出的摆臂式交替取料机构的支撑柱结构示意图;
18.图3为本发明提出的摆臂式交替取料机构的取料挡板结构示意图;
19.图4为本发明提出的摆臂式交替取料机构的伸缩电机结构示意图。
20.上述附图标记表示:包装机主体1、固定架12、横梁13、伸缩电机14、取料组件2、支撑柱21、活动腔22、限位槽23、位移传感器24、延伸感应臂25、固定柱26、限位柱27、侧板28、取料挡板29。
具体实施方式
21.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
22.需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
23.下面结合附图和具体实施例对本发明作进一步说明,但不作为本发明的限定。
24.参照图1-4,摆臂式交替取料机构,包括包装机主体1和取料组件2,包装机主体1一侧固定连接有两个固定架12,且两个固定架12对称设置,两个固定架12的上端均固定连接有横梁13,横梁13的一侧设置有伸缩电机14,取料组件2活动连接在横梁13的一侧,取料组件2与横梁13相远离的一侧活动连接有支撑柱21,支撑柱21的下端设置有延伸感应臂25,延伸感应臂25的下端外部固定连接有固定柱26,固定柱26远离延伸感应臂25的一侧设置有取
料挡板29。
25.通过设置伸缩电机14配合取料组件2与支撑柱21,经由伸缩电机14控制取料组件2位于横梁13的外侧左右滑动,当取料组件2滑动对取料挡板29与出料口进行匹配调节,由位移传感器24位于限位槽23内部滑动带动延伸感应臂25向限位槽23内部相靠近,且通过延伸感应臂25向下延伸,对取料挡板29与进料口角度进行微调,提升取料挡板29与进料口调节的精准性,提升本装置的灵活性,增加本装置的实用性,通过取料挡板29为对称设置,且便于物料位于取料挡板29的下方交替取出,形成物料取出过程中快捷性,便于交替作业,达到物料取出的灵活性,降低人工成本节省人力,同时,本装置体积小,对空间合理化使用。
26.进一步的,支撑柱21的一侧开设有横向贯穿的活动腔22,支撑柱21的下端开设有限位槽23,限位槽23与活动腔22的内部相通,延伸感应臂25活动连接在限位槽23的内壁,活动腔22的内部嵌合连接有与延伸感应臂25相配合的位移传感器24。
27.经由取料组件2移动带动取料挡板29一同移动,当取料挡板29调节至合适位置,通过位移传感器24位于限位槽23内部横向移动,使其两个取料挡板29相对滑动,且延伸感应臂25位于限位槽23内壁移动,通过延伸感应臂25与限位槽23内部贴合对其位移传感器24移动位置最大程度进行调节,对位移传感器24起到限位作用,通过延伸感应臂25位于限位槽23内部延伸对取料挡板29的高度进行调节,形成对取料挡板29在调节过程中精准性,便于物料进行取料,避免了在取料过程中物料发生偏移造成物料损坏,形成取料挡板29对物料取出的灵活性,便于对不同大小的物料进行取出作业。
28.进一步的,延伸感应臂25位于限位槽23内部的一端固定连接在位移传感器24位于限位槽23内部的一侧,且位移传感器24与延伸感应臂25呈t形状。
29.进一步的,取料挡板29的一侧固定连接有侧板28,侧板28远离取料挡板29的一侧固定连接在固定柱26的一端,取料挡板29通过侧板28固定连接在固定柱26的一侧。
30.进一步的,固定柱26上端固定连接有限位柱27,限位柱27远离固定柱26的一端滑动连接在位移传感器24位于活动腔22外侧一端。
31.进一步的,伸缩电机14固定连接在横梁13的一侧,伸缩电机14的一端转动贯穿横梁13的内部,伸缩电机14位于横梁13内部的一端固定连接在取料组件2的一侧,便于取料组件2位于横梁13外侧的距离进行调节。
32.进一步的,支撑柱21设置为两个,两个支撑柱21对称连接在取料组件2的一侧。
33.工作原理:在使用此装置时,通过设置伸缩电机14配合取料组件2与支撑柱21,经由伸缩电机14控制取料组件2位于横梁13的外侧左右滑动,当取料组件2滑动对取料挡板29与出料口进行匹配调节,由位移传感器24位于限位槽23内部滑动带动延伸感应臂25向限位槽23内部相靠近,且通过延伸感应臂25向下延伸,对取料挡板29与进料口角度进行微调,提升取料挡板29与进料口调节的精准性,提升本装置的灵活性,增加本装置的实用性。
34.通过取料挡板29为对称设置,且便于物料位于取料挡板29的下方交替取出,形成物料取出过程中快捷性,便于交替作业,达到物料取出的灵活性,降低人工成本节省人力,同时,本装置体积小,对空间合理化使用。
35.以上所述仅为本发明较佳的实施例,并非因此限制本发明的实施方式及保护范围,对于本领域技术人员而言,应当能够意识到凡运用本发明说明书及图示内容所作出的等同替换和显而易见的变化所得到的方案,均应当包含在本发明的保护范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。