1.本发明涉及测量装置、测量方法以及程序。
背景技术:
2.光学测量装置正被用于对被测量物的表面形状进行非接触的测量。
3.专利文献1公开了一种用于非接触地测量复杂表面形状的技术,其中采用三角测量方式,使激光光源在相对于表面形状垂直的方向上移动来测定到各测定点的距离,并求出表面形状的三维坐标数据。现有技术文献专利文献
4.专利文献1:日本特开平05-231832号公报
技术实现要素:
发明所要解决的问题
5.然而,当被测量物的表面形状有凹凸或不连续面时,专利文献1所公开的测量装置很难求出表面形状的正确倾斜角。因此,无法实现充分的测量。用于解决问题的方案
6.根据本发明的一个方面,提供一种测量装置。所述测量装置包括引导光源部,拍摄部,以及测量部。引导光源部配置成输出引导光,并将其对多个测量基准点的测量面进行连续照射。测量基准点是到测量面的两点间的距离的一端。拍摄部配置成对第1测量基准点的测量面上的引导光的光点进行拍摄。测量部配置成基于拍摄到的光点的形状来计算测量面的倾斜度,并基于此来计算相当于第1测量基准点的下一个次数的第2测量基准点的深度。
7.根据这样的测量装置,能够对具有复杂形状的被测量物进行高精度的测量。
附图说明
8.图1是测量装置1的整体结构图。图2是引导光的光点的形状sp的一例。图3是被测量物的测量基准点mb和测量面7。图4是绕y轴具有倾斜度θy的被测量物的状态,图4a至图4c分别是平面图、前视图以及侧视图。图5是绕x轴具有倾斜度θx、绕y轴具有倾斜度θy的被测量物的状态,图5a至图5c分别是平面图、前视图和侧视图。图6是表示测量装置1的硬件结构的框图。图7是表示信息处理装置3的硬件结构的框图。图8是表示信息处理装置3的控制部33所承担功能的功能框图。图9是拍摄到的引导光的光点的形状sp的一例。
图10是光点的形状sp相关的参照数据的一例。图11是基于投影变换的逆变换式来计算测量面7的倾斜度的方法。图12是计算实施例的测量面7的倾斜度的方法的活动图。图13是关于实施例的到测量面7的距离的测量方法的活动图。图14是关于第2实施例的测量装置1的整体结构图。图15是表示关于第2实施例的测量装置1的硬件结构的框图。图16是表示关于第2实施例的信息处理装置3的控制部33所承担功能的功能框图。图17是表示关于第2实施例的用于测量光的光度设定的二维查找表tl的一例的概略图。
具体实施方式
9.以下将结合附图对本发明的实施例进行说明。以下示出的实施例中的各种特征事项均可互相组合。
10.用于实现本实施例中出现的软件的程序可以作为由计算机读取的非暂时存储介质(non-transitory computer readable medium)进行提供,也可以由外部服务器下载提供,还可以由外部计算机启动该程序,在客户终端上实现功能(即所谓的云计算)。
11.在本实施例中,
″
部
″
可以是包含了例如广义上的电路实现的硬件资源和由这些硬件资源具体实现的软件信息处理的组合的概念。此外,在本实施例中涉及了各种信息,这些信息可通过表示电压或电流的信号值的物理值,或是作为由0或1所组成的二进制位集的信号值的高低,又或者是量子叠加(即所谓的量子比特)来表示,并且可以在广义的电路上执行通信及计算。
12.此外,广义上的电路是通过至少适当地组合电路(circuit)、电路类(circuitry)、处理器(processor)、以及存储器(memory)等来实现的电路。即,包含了面向特定用途的集成电路(asic:application specific integrated circuit),可编程逻辑设备(例如简单可编程逻辑设备(spld:simple programmable logical device)、复合可编程逻辑设备(cpld:complex programmable logic device))以及现场可编程门阵列(fpga:field programmable gate array)等等。
13.1.第1实施例的整体结构在第1章中,将说明第1实施例的整体结构。
14.1.1测量装置1在本节中,将对第1实施例相关的测量装置进行说明。图1是测量装置1的整体结构图。如图1所示,测量装置1包括测量单元2、信息处理装置3,以及显示装置8。测量装置1以非接触方式对被测量物的测量面7进行三维测量。信息处理装置3与测量单元2进行电连接,以能够输入光检测部24的检测信号。以下将对各构成要素作进一步详细说明。
15.1.2测量单元2测量单元2包括引导光源部21、测量光源部22、拍摄部23、光检测部24、以及分束器(beam splitter)25。测量单元2安装在xy工作台(未图示)、直行坐标型机器人的手(未图示)等上,并以非接触方式对被测量物进行三维测量。
16.(引导光源部21)
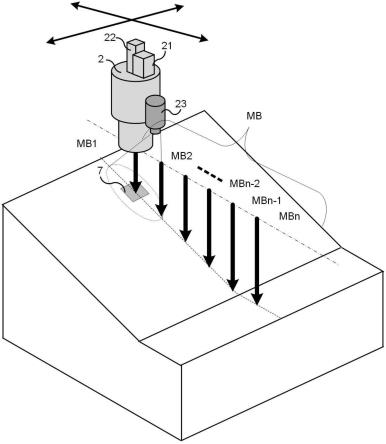
引导光源部21输出引导光。图2是引导光的光点的形状sp的一例。引导光源部21配置成对多个测量基准点mb(mb1,mb2,...,mbn-2,mbn-1,mbn)的测量面7连续地照射具有这样的形状的引导光。图3是被测量物的测量基准点mb和测量面7。测量基准点mb是到测量面7的两点间距离的一端。测量基准点mb是成为三维测量被测量物的基准的点。因此,测量基准点mb是绝对坐标系的坐标点。引导光源部21向位于各个测量基准点mb的垂直位置的被测量物的测量面7照射引导光。测量基准点mb的高度方向的坐标点相同,并且设定在与被测量物不干涉的位置。测量基准点mb的排列可以位于直线上,也可以是格子点状。引导光是可见光,以预定的光点形状对测量面7照射。光点形状可以是圆形或矩形。
17.引导光可以是可见光、红外光或紫外光。只要后述的拍摄部23能够检测引导光即可。例如,引导光的波长可以是600nm到1200nm。具体而言,引导光的波长可以例如为600、620、640、660、680、700、720、740、760、780、800、820、840、860、880、900、920、940、960、980、1000、1020、1040、1060、1080、1100、1120、1140、1160、1180、1200nm,也可以在以上所示数值的任意两个之间的范围内。
18.(测量光源部22)测量光源部22配置成输出测量光,并将其照射至多个测量基准点mb的测量面7。测量光可以是可见光、红外光或紫外光。在此,测量光是例如激光,更优选测量光源部22是光梳(optical comb)光源。
19.(拍摄部23)拍摄部23配置成对第1测量基准点mb1的测量面7上的引导光的光点进行拍摄。即,拍摄部23检测由测量面7反射的引导光的反射成分,并对其光点进行拍摄。因此,拍摄部23例如是光摄像元件,可以是ccd(charge couple devices,电荷耦合器件)图像传感器,也可以是cmos(completely metal oxide semiconductor,互补金属氧化物半导体)图像传感器。在此,选择了具有与引导光的波长对应的传感器的拍摄部23。
20.(光检测部24)光检测部24具有参照光检测部241和测量光检测部242。参照光检测部241检测由后述的分束器25反射的测量光的一部分,并提取参照数据。测量光检测部242配置成检测测量光在测量面7上的散乱光反射成分。光检测部24是检测光等电磁能量并转换为电的测量用设备。在此,光检测部24配置成能够转换为电数据。
21.(分束器25)分束器25配置在测量单元2中。分束器25使从测量光源部22照射的测量光的一部分朝向参照光检测部241反射。分束器25使剩余的光作为测量光透射,并使从反射路径进入的测量光朝向测量光检测部242反射。
22.1.3测量面7测量面7是被测量光和引导光照射的被测量物的表面。测量装置1对从测量基准点mb到测量面7的距离进行三维测量。图4是围绕y轴具有倾斜度θy的被测量物的状态,其中图4a至图4c分别是平面图、前视图和侧视图。图5是绕x轴具有倾斜度θx、绕y轴具有倾斜度θy的被测量物的状态,其中图5a至图5c分别是平面图、前视图和侧视图。两图都表示测量装置1测量从测量开始点ms到测量面7的第1距离l的状态。测量装置1根据后述的方法计算测量面7的倾斜度。倾斜并不限于x轴或y轴,可以两轴同时倾斜。通过计算测量面7的倾斜度,能
够三维测量高精度的距离。
23.1.4信息处理装置3图6是表示测量装置1的硬件结构的框图。信息处理装置3是测量装置1的构成要素。图7是表示信息处理装置3的硬件结构的框图。图8是表示信息处理装置3的控制部33所承担功能的功能框图。信息处理装置3包括通信部31、存储部32和控制部33(取得部331、测量部332、拍摄控制部333、模式切换部334、结果保存部335、显示控制部336),这些构成要素通过通信总线30在信息处理装置3的内部进行电连接。以下对各构成要素作进一步说明。
24.(通信部31)通信部31虽然优选usb、ieee1394、thunderbolt、有线lan网络通信等有线型的通信手段,但也可以根据需要包含无线lan网络通信、lte/3g等移动通信、蓝牙(bluetooth,注册商标)通信等。换句话说,更优选作为这些多个通信手段的集合来实施。特别是,优选引导光源部21、测量光源部22、拍摄部23、光检测部24配置成能够以预定的通信标准进行通信。
25.通信部31配置成接收光检测部24检测出的数据。另外,通信部31配置成能够发送用于引导光源部21及测量光源部22输出光的数据。通过这样的结构,测量装置1能够控制从测量基准点mb到测量面7的距离的三维测量。
26.(存储部32)存储部32存储上述说明所定义的各种信息。其例如可以作为诸如固态驱动器(solid state drive:ssd)等存储设备,或者作为存储与程序运算有关的临时必要信息(参数、排列等)的随机存取存储器(random access memory:ram)等存储器来实施。此外,也可以是这些的组合。特别是,存储部32存储拍摄部23以及光检测部24检测出的数据。另外,存储部32存储取得程序、测量程序、结果保存程序以及显示控制程序。此外,存储部32还存储由控制部33执行的信息处理装置3相关的各种程序等。
27.(控制部33)控制部33执行与信息处理装置3相关的整体操作的处理和控制。控制部33例如是未图示的中央处理器(central processing unit:cpu)。控制部33通过读取存储在存储部32中的预定程序来实现与信息处理装置3有关的各种功能。具体而言,相当于取得功能、测量功能、结果保存功能以及显示控制功能。即,通过由硬件(控制部33)具体地实现软件(存储在存储部32中)的信息处理,可以作为取得部331、测量部332、拍摄控制部333、模式切换部334、结果保存部335、以及显示控制部336来执行。在图6中,虽然表述为单一的控制部33,但实际上并不仅限于此,也可以按照各功能实施为具有多个控制部33。另外,也可以是这些的组合。以下将更详细地说明取得部331、测量部332、拍摄控制部333、模式切换部334、结果保存部335、以及显示控制部336。
28.(取得部331)取得部331通过硬件(控制部33)具体地实现软件(存储在存储部32中)的信息处理。取得部331配置成经由通信部31取得拍摄部23以及光检测部24检测出的电数据。
29.(测量部332)测量部332基于由拍摄部23拍摄到的引导光的光点的形状sp来计算测量面7的倾斜度。在图2中,光点的形状sp为正方形,但也可以是圆形或者矩形,只要具有一定的面积即可,并没有特别限定。图9是拍摄到的引导光的光点的形状sp的一例。由于被测量物的形状
复杂,还存在凹凸或段差,所以如图9所示,引导光的光点的形状sp是各种各样的。图9所示的光点的形状sp是在绕x轴倾斜30
°
、绕y轴倾斜30
°
的测量面7上拍摄的形状。光点的形状sp1是在平滑的测量面7拍摄到的形状。光点的形状sp2是从摄像部23到测量面7的距离远离时的形状。光点的形状sp3是在测量面7具有凸部时的形状。光点的形状sp4是在测量面7具有凹部时的形状。光点的形状sp5及光点的形状sp6是在测量面7上存在不连续面时的形状。测量部332可以基于这种复杂光点的形状sp来计算三维空间中的测量面7的x方向和y方向的倾斜度。
30.测量装置1的存储部32存储与引导光的光点的形状sp有关的参照数据。在此,参照数据是将相对于与引导光的照射方向垂直的面的梯度与各梯度中的光点的形状sp关联起来的数据。图10是与光点的形状sp相关的参照数据的一例。参照数据是使光点的形状sp事先围绕x轴和y轴旋转的黑白图像。测量部332对拍摄到的光点的形状sp进行预处理,以预定的阈值进行二值化并进行黑白图像化,将其与参照数据的各图像进行图案匹配,基于对照度最高的参照数据来计算测量面7的倾斜度。虽然在图10中仅示出了平面坐标的第4象限的参照数据,但是也可以准备第1象限、第2象限和第3象限的参照数据。另外,也可以将绕x轴以及绕y轴的旋转角度切细而准备参照数据。此外,在进行本处理时,若适当改变拍摄到的光点的形状sp的大小来进行图案匹配,则能够得到精度更高的结果。
31.与引导光的光点的形状sp有关的参照数据可以是学习了梯度与各梯度中光点的形状sp的相关性的已学习模型。已学习模型是通过将使光点的形状sp绕x轴及y轴旋转而创建的各梯度与光点的形状sp相关的参照数据相关联来创建的。已学习模型预先存储在存储部32中。如图10所示,可以通过使多个引导光的光点的形状sp绕x轴及y轴进行各种旋转来创建已学习模型。
32.测量部332配置成基于已学习模型来计算测量面7的倾斜度。因此,当将拍摄部23拍摄到的引导光的光点的形状sp输入已学习模型时,测量部332特定具有最强相关关系的参照数据,并计算测量面7的倾斜度。通过使用多个参照数据来创建已学习模型,测量部332可以精确地计算测量面7的倾斜度。
33.此外,测量部332可以使用几何学的变换来计算测量面7的倾斜度。例如,可以使用作为几何学的变换之一的投影变换。任意的坐标(x,y)通过数学式1的投影变换移动至(x
′
,y
′
)。其中,a、b、c、d、e、f、g、h是参数。[数学式1]eqn.1eqn.1
[0034]
使用数学式1的逆变换式,使坐标(x
′
,y
′
)绕x轴及y轴以预定的角度旋转,从而得到坐标(x,y)。重复该操作,直到所拍摄的光点的形状sp变为正方形的光点的形状sp。图11是根据投影变换的逆变换式计算测量面7的倾斜度的方法。如图11所示,对拍摄到的光点的
形状sp8的各顶点a
′
、b
′
、c
′
、d
′
以倾斜度θx和θy进行逆变换。换句话说,改变倾斜度θx和θy,并重复继续这样的逆变换,直到从逆变换的光点的形状sp7的各顶点a、b、c、d获得的ab、bc、cd、da各边的长度相等。当各边的长度大致相等时,停止逆变换,将θx和θy设为测量面7的倾斜度。
[0035]
测量部332配置成基于计算出的测量面7的倾斜度来计算相当于第1测量基准点mb1的下一个次数的第2测量基准点mb2的深度。基于所述深度,测量部332在下一个测量基准点mb判断测量光源部22是否进入工作距离内。在其处于工作距离内的情况下,测量光源部22不向高度方向移动。在其处于工作距离外的情况下,测量光源部22移动到测量开始点ms,以便进入工作距离内。当被测量物的形状复杂,且从测量基准点mb到测量面7的距离偏离焦距时,无法进行高精度的测量。因此,通过基于测量面7的倾斜度计算测量面7的深度,并使测量光源部22移动至测量开始点ms以进入工作距离内,从而能够进行高精度的测量。由于测量开始点ms是工作距离内的位置,因此在与测量基准点mb的关系中位于上下两方。在图3至图5中,测量单元2的先端成为测量基准点mb及测量开始点ms。只要测量光源部22进入工作距离内则没有问题。
[0036]
测量部332基于测量面7反射的测量光的散乱光反射成分,连续地测量从测量开始点ms到测量面7上的测量光的反射点的距离即第1距离l。测量开始点ms位于工作距离内的位置。第1距离l是测量装置1物理测量的距离。测量部332将所述第1距离l与从测量基准点mb到测量开始点ms的距离即第2距离m相加,从而计算测量距离。第2距离m是预先使测量光源部22移动以进入工作距离内的距离,是从测量基准点mb到测量开始点ms的距离,是测量部332计算出的值。第2距离m根据测量面7的深度而变动。测量装置1配置成这样测量测量面7的形状。测量装置1物理测量的距离是从测量光源部22到测量面7的距离,但也可以是距测量单元2的先端的距离。测量到的距离基于测量装置1的设计数据变换即可,测量的基准位置并无特定。
[0037]
以非接触方式测量距离的方法有很多。在此,说明使用光脉冲法的原理的测量方法。测量部332使测量光源部22输出光,根据参照光检测部241检测出的参照信号数据以及测量光检测部242检测出的测量信号数据,来测量光的往复时间τ。到被测量物的测量面7的第1距离l如数学式2那样求出。[数学式2]eqn.2需要注意的是,n是光路的平均折射率,c是真空中的光速。
[0038]
在测量光源部22是光梳光源的情况下,能够通过由光梳干涉测量来测量距离。通过在测量单元2中设置带通滤波器(未图示)来提取高频成分,并求出模式间隔频率的电相位差,从而测量距离。
[0039]
(拍摄控制部333)拍摄控制部333配置成调节拍摄部23的位置或其焦点位置,以使从在上次的测量中计算出的测量基准点mb到测量面7的深度进入拍摄部23的景深内。拍摄控制部333调节拍摄部23的位置,以使得在测量基准点mb中的引导光的光点的形状sp的焦点始终对齐。在调
节时,可以直接调节拍摄部23的位置或其焦点位置,也可以调节具有拍摄部23的测量单元2的位置。调节方法没有限定。
[0040]
拍摄控制部333配置成基于调节了的拍摄部23的位置或其焦点位置,使测量光源部22从测量基准点mb移动至测量开始点ms。即,在测量光源部22偏离了工作距离的情况下,拍摄控制部333使测量光源部22在高度方向上移动到测量开始点ms,以使焦点对准测量面7。在已经处于工作距离内的情况下,测量光源部22不移动。这样一来,通过在测量基准点mb使测量光源部22移动以进入工作距离内,则能够进行稳定的测量。由于在每次测量时计算测量面7的倾斜度,能够计算从下一个测量基准点mb到测量面7的深度。根据所述深度,拍摄控制部333调整拍摄部23的位置以使引导光的光点的形状sp的焦点对齐,进而使测量光源部22移动以使测量光源部22进入工作距离内。在移动时,既可以仅使测量光源部22直接移动,也可以使具有测量光源部22的测量单元2移动。移动方法没有限定。
[0041]
(模式切换部334)模式切换部334配置成切换引导光模式和测量光模式。在此,所谓引导光模式是指引导光源部21输出引导光的模式,所谓测量光模式是指测量光源部22输出测量光的模式。作为测量装置1三维地测量被测量物的测量面7的方法的一例,有最初以引导光模式计算各测量基准点mb的测量面7的倾斜度以及从各测量基准点mb到测量面7的深度,接着切换为测量光模式,计算从各测量基准点mb到测量面7的测量距离的方法。在本方法中,在引导光模式下,预先使存储部32存储各测量基准点mb的倾斜度以及从各测量基准点mb到测量面7的深度。接着,在测量光模式下,拍摄控制部333从存储部32读取这些数据,并基于这些数据,使测量光源部22移动以使测量光源部22进入工作距离内,并测量从测量开始点ms开始的精确距离。
[0042]
(结果保存部335)结果保存部335通过硬件(控制部33)具体地实现软件(存储在存储部32中)的信息处理。结果保存部335使存储部32存储各测量基准点mb的坐标点、引导光模式下计算出的各测量基准点mb上的测量面7的倾斜度、从各测量基准点mb到测量面7的深度等测量相关的数据。
[0043]
(显示控制部336)显示控制部336通过硬件(控制部33)具体地实现软件(存储在存储部32中)的信息处理。显示控制部336在测量中或测量结束后,使显示装置8显示各测量基准点mb的坐标点、各测量基准点mb上的测量面7的倾斜度、从各测量基准点mb到测量面7的深度等测量相关的数据。由于这些数据实时地显示生产现场的测量状况,因此能够迅速掌握和确定被测量物的测量面7的问题点。这样一来有助于迅速应对等。
[0044]
2.测量方法在第2节中,将对使用了第1节中说明的测量装置1的测量方法进行说明。测量方法包括引导光输出步骤,拍摄步骤,倾斜度测量步骤,拍摄控制步骤,测量光控制步骤,测量光输出步骤,测量光检测步骤,以及距离测量步骤。在引导光输出步骤中,输出引导光。将其对多个测量基准点mb的测量面7进行连续照射。在此,测量基准点mb是到测量面7的两点间的距离的一端。在拍摄步骤中,对第1测量基准点mb的测量面7上的引导光的光点进行拍摄。在倾斜度测量步骤中,基于拍摄到的光点的形状sp来计算测量面7的倾斜度。基于此来计算相
当于第1测量基准点mb1的下一个次数的第2测量基准点mb2的深度。在拍摄控制步骤中,调节拍摄部23的位置或其焦点位置,以使深度进入拍摄部23的景深内。在测量光控制步骤中,基于拍摄部23的位置或其焦点位置,使测量光源部22从测量基准点mb移动至测量开始点ms。在测量光输出步骤中,输出测量光。将其照射至测量面7。在测量光检测步骤中,检测测量光在测量面7上的散乱光反射成分。在距离测量步骤中,基于散乱光反射成分连续地测量从测量开始点ms到测量面7的测量光的反射点为止的距离即第1距离l,并计算第1距离l与从测量基准点mb到测量开始点ms为止的距离即第2距离m相加的测量距离。由此来测量测量面7的形状。具体来说,将所述测量方法分成两部分说明。
[0045]
2.1测量基准点mb上测量面7的倾斜度的计算方法在本节中,将说明计算测量面7的倾斜度的方法的一例。图12是计算实施例相关的测量面7的倾斜度的方法的活动图。以下将按照本图进行说明。
[0046]
(活动a01)用户通过模式切换部334切换到引导光模式。(活动a02)引导光源部21输出引导光。(活动a03)测量部332确认是否是最后的测量基准点mb。(活动a04)如果不是最后的测量基准点mb,则引导光源部21向测量面7照射引导光。如果是最后的测量基准点mb,则执行活动a14。(活动a05)测量部332确认是否是最初的测量基准点mb。(活动a06)如果不是最初的测量基准点mb,则拍摄控制部333从存储部32读取从测量基准点mb到测量面7的深度。(活动a07)拍摄控制部333根据从存储部32读取的深度调整拍摄部23以使其进入景深内。(活动a08)拍摄部23移动至景深内。(活动a09)拍摄部23拍摄引导光的光点的形状sp。(活动a10)取得部331取得引导光的光点的形状sp的图像数据。(活动a11)测量部332基于引导光的光点的形状sp的图像数据来计算测量面7的倾斜度。(活动a12)测量部332基于测量面7的倾斜度来计算在下一个测量基准点mb到测量面7的深度。(活动a13)
结果保存部335使存储部32存储测量面7的倾斜度和在下一个测量基准点mb到测量面7的深度。(活动a14)引导光源部21停止引导光的输出,结束处理。
[0047]
2.2测量基准点mb到测量面7的距离的测量方法在本节中,将对三维测量到被测量物的测量面7的距离的方法的一例进行说明。图13是实施例相关的到测量面7的距离的测量方法的活动图。
[0048]
(活动a21)用户通过模式切换部334切换到测量光模式。(活动a22)测量部332确认是否是最后的测量基准点mb。(活动a23)如果不是最后的测量基准点mb,则引导光源部21移动至下一个测量基准点mb。如果是最后的测量基准点mb则结束。(活动a24)拍摄控制部333确认是否是最初的测量基准点mb。(活动a25)如果不是最初的测量基准点mb,则拍摄控制部333从存储部32读取测量基准点mb的深度。(活动a26)拍摄控制部33基于测量基准点mb的深度计算测量开始点ms,以使测量光源部22进入工作距离。(活动a27)测量光源部22移动到测量开始点ms。(活动a28)测量光源部22输出测量光。(活动a29)参照光检测部241检测参照光。测量光检测部242检测测量光。(活动a30)取得部331取得参照信号数据以及测量信号数据。(活动a31)测量部332基于参照信号数据以及测量信号数据来测量从测量开始点ms到测量面7的第1距离l。(活动a32)测量部332将第1距离l与从测量基准点mb到测量开始点ms的第2距离m相加,并测量从测量基准点mb到测量面7的距离。(活动a33)结果保存部335使存储部32存储从测量基准点mb到测量面7的距离。(活动a34)
测量光源部22停止测量光的输出。
[0049]
3.第2实施例的整体结构在第3章中,将依次说明第2实施例的整体结构。与所述第1实施例重复的部分将适当省略说明。
[0050]
3.1测量装置1在本节中,将对第2实施例相关的测量装置进行说明。图14是第2实施例相关的测量装置1的整体结构图。图15是表示第2实施例相关的测量装置1的硬件结构的框图。如图14所示,和第1实施例相同,测量装置1包括测量单元2、信息处理装置3以及显示装置8。测量装置1以非接触方式对被测量物的测量面7进行三维测量。信息处理装置3与测量单元2进行电连接,以能够输入光检测部24以及照度计27的检测信号。以下将对第1实施例中说明的测量单元2以及信息处理装置3中追加的构成要素作进一步详细说明。
[0051]
3.2测量单元2在第2实施例中,测量单元2包括引导光源部21、测量光源部22、拍摄部23、光检测部24、分束器25、第2分束器26以及照度计27。测量单元2安装在xy工作台(未图示)、直行坐标型机器人的手(未图示)等上,以非接触方式对被测量物进行三维测量。在这些构成要素中,将对第2实施例中追加的第2分束器26和照度计27进行说明。
[0052]
(第2分束器26)第2分束器26配置在测量单元2中。第2分束器26使从测量光源部22照射的测量光朝向测量面7透过,使从反射路径进入的在测量面7反射的散乱光的一部分以预定的分割比朝向后述的照度计27反射,并使剩余的散乱光朝向分束器25透过。
[0053]
(照度计27)照度计27也称为光度计,是测量照度或放射照度的光度测定机器,用于测定散乱光、吸光、荧光等的光的强度。在此,照度计27安装在测量单元2上,测定在测量面7反射的散乱光的一部分的强度。
[0054]
3.3信息处理装置3信息处理装置3是测量装置1的构成要素。图16是表示第2实施例相关的信息处理装置3的控制部33所承担功能的功能框图。信息处理装置3包括通信部31、存储部32和控制部33(取得部331、测量部332、拍摄控制部333、模式切换部334、结果保存部335、显示控制部336、以及光度设定部337),这些构成要素经由通信总线30在信息处理装置3的内部进行电连接。以下将对第1实施例的构成要素中追加了的光度设定部337作进一步说明。
[0055]
(光度设定部337)光度设定部337可基于测量面7的倾斜度来设定从测量光源部22所输出的测量光的光度。测量面7的倾斜度是由所述的测量部332测量的测量面7绕x轴的倾斜度θx,以及绕y轴的倾斜度θy。具体来说,根据两个倾斜度的计算结果,如各轴的倾斜度θx和θy的平均值,两个角度中的最小值、两个角度中的最大值等,光度设定部337设定测量光的光度。当这两个倾斜度的计算结果的值较小时,在测量面7反射的散乱光的亮度较大,因此光度设定部337将测量光的光度设定得较小。相反,当这两个倾斜度的计算结果的值较大时,在测量面7反射的散乱光的亮度较小,因此光度设定部337将测量光的光度设定得较大。
[0056]
图17是表示第2实施例相关的用于测量光的光度设定的二维查找表tl的一例的概
略图。如图17所示,光度设定部337可使用二维查找表tl来设定测量光的光度。即,将二维查找表tl的横轴设为绕x轴的倾斜度θx,将纵轴设为绕y轴的倾斜度θy,对各阵列设定测量光的光度的值。在此,所述值是针对测量面7围绕x轴的倾斜度θx和围绕y轴的倾斜度θy在10
°
以下的测量光的光量的比率。通过将这样的二维查找表tl存储在存储部32中,光度设定部337根据围绕x轴的倾斜度θx以及围绕y轴的倾斜度θy来特定二维查找表tl的阵列,并且使用从存储部32读取的值来设定测量光的光度。查找表tl的纵轴、横轴的各倾斜度的设定值以及各阵列的值根据测量光的波长、测量面7的材质、表面处理的状态等测量条件来决定。
[0057]
光度设定部337也可基于在测量面7反射的散乱光,来设定从测量光源部22所输出的测量光的光度。在此,将说明基于散乱光的强度由光度设定部337设置从测量光源部22输出的测量光的光度的示例。如图15所示,测量散乱光的强度的照度计27安装在测量单元2上。配置在测量单元2中的第2分束器26使在测量面7反射的散乱光的一部分朝向照度计27反射。通过这样的结构,照度计27测定在测量面7反射的散乱光的强度。具体而言,当照度计27测定的散乱光的强度较小时,光度设定部337将从测量光源部22输出的测量光的光度设定得较大。相反,当由照度计27测定的散乱光的强度较大时,光度设定部337将从测量光源部22输出的测量光的光度设定得较小。
[0058]
测量装置1也可以根据从测量光检测部242变换的电信号而测定散乱光的强度,来代替照度计27。进而,也可以基于拍摄部23拍摄的测量面7上的引导光的光点来测定散乱光的强度。例如,具体而言,通过对所拍摄的光点的亮度图像进行图像处理来测定散乱光的强度。
[0059]
这样一来,通过光度设定部337基于在测量面7反射的散乱光的强度来设定从测量光源部22输出的测量光的光度,能够始终进行稳定的测量,并且能够以适当的光量从测量光源部22输出测量光。通过根据散乱光的强度设定测量光的光量的机构,实现了三维测量的稳定性和节能性。
[0060]
4.其他所述实施例还可通过以下方式来实施。
[0061]
(1)拍摄控制部333也可以调整拍摄部23,使其在测量中在下一个测量基准点mb进入景深,并且使测量光源部22移动到测量开始点以使其进入工作距离内。在移动之后,测量部332测量到测量面7的距离。(2)引导光的光点的形状sp不限于实施例的正方形。光点的形状sp可以是圆形,也可以是其他矩形。(3)距离的测量不限于所述方法,也可以适当地采用光调制法、匹配法、光梳干涉测量法等。(4)测量光可以具有引导光的功能。即,测量装置1也可以使用从一个光源输出的光来计算测量面7的倾斜度、深度,进而测量到测量面7的距离。(5)还可以提供程序,使计算机执行所述测量方法。
[0062]
此外,还可以通过以下各种方式来提供。在所述测量装置中,还包括测量光源部以及测量光检测部,所述测量光源部配置成输出测量光,并将其照射至所述测量面,所述测量光检测部配置成测量所述测量光在所述测量面上的散乱光反射成分,所述测量部配置成基于所述散乱光反射成分连续地测量从
测量开始点到所述测量面的所述测量光的反射点的距离即第1距离,并且计算所述第1距离与从所述测量基准点到所述测量开始点的距离即第2距离相加的测量距离,并由此来测量所述测量面的形状。在所述测量装置中,还包括拍摄控制部,所述拍摄控制部配置成调节所述拍摄部的位置或其焦点位置,以使所述深度进入所述拍摄部的景深内。在所述测量装置中,所述拍摄控制部配置成,基于所述拍摄部的位置或其焦点位置,使所述测量光源部从所述测量基准点移动至测量开始点。在所述测量装置中,还包括模式切换部,所述模式切换部配置成切换引导光模式和测量光模式,其中,所述引导光模式是所述引导光源部输出所述引导光的模式,所述测量光模式是所述测量光源部输出所述测量光的模式。在所述测量装置中,还包括存储部,所述存储部存储参照数据,其中所述参照数据是将相对于与所述引导光的照射方向垂直的面的梯度与各梯度中的所述光点的形状关联起来的数据,所述测量部配置成基于所述参照数据来计算所述测量面的倾斜度。在所述测量装置中,所述参照数据是学习了所述梯度与各梯度中所述光点的形状的相关性的已学习模型,所述测量部配置成基于所述已学习模型来计算所述测量面的倾斜度。在所述测量装置中,所述测量光源部是光梳(optical comb)光源。在所述测量装置中,所述光点的形状是矩形。在所述测量装置中,还包括光度设定部,所述光度设定部基于所述测量面的倾斜度或在所述测量面反射的散乱光,来设定从所述测量光源部所输出的所述测量光的光度。一种测量方法,包括引导光输出步骤,拍摄步骤,倾斜度测量步骤,拍摄控制步骤,测量光控制步骤,测量光输出步骤,测量光检测步骤,以及距离测量步骤;在所述引导光输出步骤中,输出引导光,并将其对多个测量基准点的测量面进行连续照射,其中所述测量基准点是到所述测量面的两点间的距离的一端;在所述拍摄步骤中,对第1测量基准点的所述测量面上的所述引导光的光点进行拍摄;在所述倾斜度测量步骤中,基于拍摄到的所述光点的形状来计算所述测量面的倾斜度,并基于此来计算相当于所述第1测量基准点的下一个次数的第2测量基准点的深度;在所述拍摄控制步骤中,调节拍摄部的位置或其焦点位置,以使所述深度进入所述拍摄部的景深内;在所述测量光控制步骤中,基于所述拍摄部的位置或其焦点位置,使测量光源部从所述测量基准点移动至测量开始点;在所述测量光输出步骤中,输出测量光,并将其照射至所述测量面;在所述测量光检测步骤中,检测所述测量光在所述测量面上的散乱光反射成分;在所述距离测量步骤中,基于所述散乱光反射成分连续地测量从所述测量开始点到所述测量面的所述测量光的反射点的距离即第1距离,并计算所述第1距离与从所述测量基准点到所述测量开始点的距离即第2距离相加的测量距离,并由此来测量所述测量面的形状。一种程序,使计算机执行所述测量方法。当然,并不仅限于此。
[0063]
最后,虽已对本发明所涉及的种种实施方式进行了说明,但这些实施方式仅作为示例提出,并不用以限制本发明的范围。本发明还可通过其他各种实施方式来实现,凡是在本发明的精神和原则内所作的任何省略、修改、等同替换、改进等,均应包含在本发明的保
护范围的内。相关实施例或变形例不仅应包含在本发明的范围或主旨中,还应包含在权利要求范围所记载的发明及其均等范围之内。符号简单说明
[0064]
1:测量装置2:测量单元21:引导光源部22:测量光源部23:拍摄部24:光检测部241:参照光检测部242:测量光检测部25:分束器26:第2分束器27:照度计3:信息处理装置30:通信总线31:通信部32:存储部33:控制部331:取得部332:测量部333:拍摄控制部334:模式切换部335:结果保存部336:显示控制部337:光度设定部7:测量面8:显示装置l:第1距离m:第2距离mb:测量基准点mb1:第1测量基准点mb2:第2测量基准点mb3:第3测量基准点mbn-2:第n-2测量基准点mbn-1:第n-1测量基准点mbn:第n测量基准点ms:测量开始点sp:光点的形状
sp1:光点的形状sp2:光点的形状sp3:光点的形状sp4:光点的形状sp5:光点的形状sp6:光点的形状sp7:光点的形状sp8:光点的形状tl:查找表θx:倾斜度θy:倾斜度
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。