1.本发明涉及电子换向液压机领域。
背景技术:
2.已知电子换向液压机,其中对于每个单独的工作腔室容积循环,通过至少低压阀和在一些实施例中(例如,如果机器用作马达)的高压阀的主动控制来控制每个工作腔室的工作流体的排量,该主动控制与工作腔室容积的循环成相位关系,该低压阀将每个工作腔室连接到低压歧管,该高压阀将每个工作腔室连接到高压歧管。这种机器可以对需求的变化做出快速反应,并且可以使输出与波动的需求信号非常紧密地匹配。
3.本发明特别涉及一种电子换向机,其散布存在工作流体净排量的工作腔室容积的有效循环与不存在工作流体净排量的工作腔室容积的无效循环。通常,大部分或所有有效循环是全冲程循环,其中工作腔室通过适当控制阀致动信号的时间来排出工作流体的预定最大排量。还已知通过操作所谓的部分冲程循环来调节低压阀和可选的高压阀,以调节在有效循环期间产生的最大排量的分数。然而,这种机器通常散布有效循环和无效循环,有效循环是全冲程循环,有效循环的循环分数(有效循环分数)是变化的,以实现所需的分段式排量,而不是仅以部分冲程循环操作。
4.我们发现,当这种机器以其最大输出的一些特定分数运行时,可能会出现问题。这方面的示例可以在它们最大输出的低分数和最大输出的高分数中找到。在低分数情况下,机器可能只执行偶尔的有效循环,其间有无效循环,导致高度脉动流。我们发现,这种脉动流有时会导致振动(特别是低频的振动)和共振效应。例如,如果这种机器以每次轴旋转最大排量的5%运行,并且这是通过执行一有效循环,随后是19个连续的无效循环,然后重复该模式来实施的,并且如果工作腔室在相位上等距间隔开,这将引起工作腔室选择频率(工作腔室致力有效或无效循环的频率)的1/20的振动。如果这对应于设备部件的共振频率,则可能导致不期望的晃动或损坏。例如,如果设备是挖掘机,那么低频脉动流可能会导致操作者的驾驶室晃动。因此,工作腔室(例如,缸体)激活的重复模式(即,工作腔室执行有效循环)导致产生相应的运动频率(以及在一些情况下它的谐波)。
5.由于缸体执行无效循环的模式,也可能发生共振效应。例如,如果同一机器以最大排量的95%运行,它将主要执行有效循环,每二十分之一循环为无效循环。这种缸体非主动模式可以在等于工作腔室致动频率的1/20的频率下再次产生共振效应。强共振也可能发生在最大排量的恰好50%以上和恰好50%以下。
6.因此,本发明寻求提供电子换向液压机,其散布工作腔室容积的有效循环和无效循环,其抑制或避免特定共振频率、特别是低频的产生。
7.wo 2015/040360(abrahams等人)公开了一种机器,其中调节阀致动信号的模式,使得工作腔室的有效循环和无效循环的模式的频谱的一个或多个强度峰值的频率不保持在一个或多个不期望的频率范围内。本发明寻求提供一种替代方法,其实施起来通常不那么复杂。
技术实现要素:
8.根据本发明的第一方面,提供了一种操作设备的方法,该设备包括:原动机和多个液压致动器;液压机,该液压机具有与原动机驱动接合的可旋转轴,并且包括多个工作腔室,多个工作腔室具有随着可旋转轴的旋转而循环地变化的容积(例如,每个腔室由缸体限定,使用时活塞在该缸体内往复运动),
9.液压回路,该液压回路在液压机的一个或多个工作腔室的组与一个或多个液压致动器之间延伸,
10.该液压机的每个工作腔室包括调节该工作腔室与低压歧管之间的液压流体流动的低压阀,以及调节该工作腔室与高压歧管之间的液压流体流动的高压阀,
11.该液压机构造为响应于需求信号而主动地控制一个或多个工作腔室的组的至少低压阀(并且在一些实施例中还控制高压阀),以选择每个工作腔室在每个工作腔室容积的循环上的液压流体净排量,并由此选择一个或多个工作腔室的组的液压流体净排量,
12.该方法包括控制所述阀以使每个工作腔室在每个工作腔室容积的循环期间执行工作腔室容积的有效循环或无效循环,
13.其特征在于,执行有效循环的工作腔室的分数是可变的,并从多个离散分数中选择。
14.根据本发明的第二方面,提供了一种设备,该设备包括:原动机和多个液压致动器;液压机,该液压机具有与原动机驱动接合的可旋转轴,并且包括多个工作腔室,多个工作腔室具有随着可旋转轴的旋转而循环性地变化的容积(例如,每个腔室可以由缸体限定,使用时活塞在该缸体内往复运动),
15.液压回路,该液压回路在液压机的一个或多个工作腔室的组与一个或多个液压致动器之间延伸,
16.该液压机的每个工作腔室包括调节该工作腔室与低压歧管之间的液压流体流动的低压阀,以及调节该工作腔室与高压歧管之间的液压流体流动的高压阀,
17.该液压机包括控制器,该控制器构造为响应于需求信号而主动地控制一个或多个工作腔室的组的至少低压阀(以及在一些实施例中还控制高压阀),以选择每个工作腔室在每个工作腔室容积的循环上的液压流体净排量,并由此选择一个或多个工作腔室的组的液压流体净排量,
18.该控制器构造成(例如,编程为)控制所述阀以使每个工作腔室在每个工作腔室容积的循环期间执行工作腔室容积的有效循环或无效循环,
19.其特征在于,该设备构造成使得执行有效循环的工作腔室的分数是可变的,并从多个离散分数中选择。
20.可能的是,液压机的控制器构造成使得执行有效循环的工作腔室的分数是可变的,并且可以是多个离散分数中的一个。可能的是,该设备构造成使得液压机的控制器仅接收从多个离散值中选择的需求信号,从而使得执行有效循环的工作腔室的分数是可变的,并且从多个离散分数中选择。
21.我们所说的“有效循环(active cycles)”是指会产生工作流体净排量的工作腔室容积的循环。我们所说的“无效循环(inactive cycles)”指的不会产生工作流体净排量的工作腔室容积的循环(通常低压阀和高压阀中的一个或两个在整个循环中保持闭合)。通
常,散布有效循环和无效循环以满足需求信号所指示的需求。这与仅执行有效循环的机器形成对比,有效循环的排量可能会变化。我们所说的“工作腔室选择决定”,是指决定工作腔室是否经历工作腔室容积的有效循环或无效循环。这些通常发生在可旋转轴处于多个离散角度中的每一个时。我们所说的“有效循环分数”是指执行有效循环的工作腔室的分数。这也称为启用分数。需求信号通常处理为“排量分数”fd,它是可旋转轴每旋转一次工作流体最大排量的目标分数。考虑到可旋转轴的当前旋转速度和成组连接到同一高压歧管和(一个或多个)致动器的工作腔室的数量,在体积方面表示的需求(每秒工作流体的体积)可以转换为排量分数。需求信号涉及对通过液压回路流体连接到所述一个或多个液压致动器的一个或多个工作腔室的组的组合流体排量的需求。可以存在一个或多个工作腔室的其他组,它们流体连接到具有相应的需求信号的一个或多个其他液压致动器。
22.选择多个离散分数以避免在不需要的频率下产生共振振荡,特别是在低于预定最小频率的频率下产生共振。通常,选择多个离散分数以避免产生长度大于预定最大重复模式长度的工作腔室容积的有效循环和无效循环的任何重复模式。通常,当多个离散分数表示为不可约分数时,其不包括分母大于预定最大分母的任何分数。
23.这可以避免或减少共振振荡的负面影响,否则就会发生比如部件损坏、操作者经历不可接受的噪声和振动。包含液压泵和马达的设备可能会因液压泵或马达的运行引起的振荡而损坏。
24.多个离散分数的选择通常考虑到可旋转轴的旋转的预定操作速度(其可以是典型或最小典型操作速度)(因为可旋转轴的旋转速度规定了工作腔室循环的频率)。
25.通常,液压机所响应的需求信号是量化的,具有多个离散值中的一个。离散值也可以是离散分数(例如,有效循环分数)。这些离散值可能与离散分数相同。然而,这将取决于需求信号的单位和处理需求信号的方式,以决定工作腔室是否进行有效循环或无效循环。因此,由于控制工作腔室的至少低压阀(以及在一些实施例中还控制高压阀)以选择每个工作腔室在工作腔室容积的每个循环上的液压流体的净排量,这导致执行有效循环的工作腔室的分数是可变的,同时是从多个离散分数中选择的分数。
26.可以将多个离散分数(以及在适用的情况下,多个离散值)视为一组(有限数目的)离散分数(值),在任何给定时间从中选择一个值。多个离散分数(或值)通常存储在与机器的控制器电子通信的固态存储设备上,并根据需要从固态存储器中读取。
27.可能的是,接收并且量化(可选地连续的)需求信号,例如通过选择最接近接收到的需求的离散值,或者接收到的需求信号之上或之下的下一个离散值。可以在量化步骤中应用滞后,以避免颤动。
28.多个离散值和多个离散分数可以表示由一个或多个工作腔室的组的可旋转轴每旋转一次工作流体的最大排量的相应分数(排量分数,fd)。
29.可以存在确定离散值的步骤,例如计算它们或从存储器读取它们,并且它们可以是可变的,例如取决于可旋转轴的旋转速度。
30.在需求信号被量化的情况下,这些离散的排量分数(“量化排量”)处的有效循环和无效循环模式会导致具有已知频率含量的缸体激活模式(即,执行有效循环或无效循环的缸体模式),并且因此,最小频率重复缸体有效模式是已知的。
31.因此,通过防止某些范围的fd来控制阀命令信号的模式,以减少不需要的振动。这
确实意味着有时并不能准确满足目标净排量。然而,在一些闭环反馈系统中,由此产生的任何误差都可以被校正,因为机器有时会以超过所需排量分数的离散分数工作,并且有时会以低于所需排量分数的离散分数工作。
32.不容许体积误差的系统的一个示例是基于开环排量控制的系统,该控制要求泵递送所要求的准确体积的流体。具有积分项的闭环压力控制,比如ls(负载感测)系统,也会受到量化的影响。当连续排量需求水平位于量化表的两个离散水平之间时,排量需求可以在两个离散排量水平之间循环。例如,假设我们处于稳定状态,我们控制到20巴。较低的排量水平将提供18巴,而较高的排量水平将提供25巴。让我们假设最近的离散水平低于连续排量水平。所选的离散水平从泵递送的流率低于由连续排量水平需求所产生的流率。它递送18巴。这导致压力控制回路中的积分器项上升。在某个点处,这个积分器项将变得足够大,以使连续排量需求水平接近较高的离散排量水平,并且所选的离散排量将上升到该较高水平。递送的压力将是25巴,所以积分器项将开始减小。在某个点处,它将变得足够低,以降低泵所需的排量水平。该循环可能无限期地继续,并且这可能在低频率下发生,并将低频率含量引入液压管线。
33.然而,可以调节至少低压阀(以及在一些实施例中还有高压阀)的打开或闭合的时间,以改变在每个有效循环期间由每个工作腔室排出的最大冲程容积的分数。被排出的最大冲程的分数可以与有效循环分数协配(例如,通过设备控制器),以使液压机排出由需求信号指示的排量分数,同时将有效循环分数约束为多个离散分数中的仅一个。
34.尽管执行有效循环的工作腔室的分数(fraction)被限制为多个离散分数中的一个,这可能使得能够产生可旋转轴每转一次的连续范围的排量。这将使可旋转轴每转一次的所有排量(从零到满)有效地创建(完全)可变排量液压机(使用有限数量的离散有效循环分数可以实现完全连续的排量)。通过允许从0-100%的最大冲程容积变化范围,可以实现最大排量的所有分数,但也可以约束最大冲程容积变化为0-5%和95-100%或0-10%和90-100%。可能的使,在每个循环期间由每个工作腔室排出的最大冲程容积的分数在0到x%和y%到100%之间变化,其中x《25且y》75,或者甚至其中x《=10且y》=90。这是因为当进入或离开工作腔室的流体流率受限时,仅在接近冲程开始或结束时(在工作腔室容积的循环内)通过致动阀可以产生这些范围内的部分冲程排量。
35.需求信号的多个离散分数和/或多个离散值可以是等距间隔开的,或可以不是等距间隔开的。需求信号的离散分数和/或离散值可以随着可旋转轴的旋转速度而变化,也可以不随着可旋转轴的旋转速度而变化。如果它们随着可旋转的轴的旋转速度变化,则可以选择它们以减少低频分量的产生。例如,可以存在少于1000个或少于100个离散值。在需求信号是数字的情况下,我们不是指二进制逻辑施加的可能值,而是指在考虑需求信号的比特大小的情况下可以数字地表示的值的子集。因此,考虑位长,离散值通常表示小于10%、小于1%或小于0.1%的需求信号可能具有的数字值。
36.可能的是,控制器接收需求信号(通常是连续的需求信号)并且确定对应的数值系列,所述数值系列对应于工作腔室容积的有效循环和/或无效循环的模式,从而满足需求信号(即,当由工作腔室容积的有效循环和/或无效循环的模式产生的需求信号(fd)在一时间段上被平均时)。该方法可以包括接收需求信号(通常是连续的需求信号)并且确定对应的数值系列,所述数值系列对应于工作腔室容积的有效循环和/或无效循环的模式,从而满足
需求信号(即,当由工作腔室容积的有效循环和/或无效循环的模式产生的需求信号(fd)在一个时间段上被平均时)。
37.例如,控制器可以接收最大排量的90%的连续需求信号,并且可确定数值的系列,其包括至少100个值、或优选地至少500个值、或更优选地至少1000个值。数值的系列可包括重复序列,并且因此有效循环和/或无效循环的模式可包括对应于重复序列的周期。在一段时间内平均的有效循环将满足尽可能接近90%,而不会在序列中产生低频率含量。
38.在一些实施例中,在每个有效循环期间工作流体的净排量是相同的。该排量通常是每个工作腔室的工作流体的最大排量。
39.我们所说的“分数(fraction)”是指从0到1范围内的数字,表示为具有整数分子和整数分母的比率。我们所说的“不可约分数”是指分子和分母没有共同整数因子的分数。例如,3/6与不可约分数1/2相同。
40.通常,当离散分数表示为不可约分数时,分母的范围高达最大值,选择该最大值以避免产生频率小于预定最小值的工作腔室致动的重复模式。通常,当离散分数表示为不可约分数时,它们包含每个整数分母高达最大分母的分数。可能的是,当离散分数表示为不可约分数时,它们包含的分数,其中每个整数分母是整数i的倍数,直到最大分母。(例如,对于i=3,分母将是3、6、9、12
……
许多这样的分数在表示为不可约分数时会有更小的整数,但分数将通常包括1/i、1/2i、1/3i
……
(3i-1)/3i、(2i-1)/2i、i-1/i)。
41.多个分数可以包括每个不可约分数或由其组成(通常连同0和1),不可约分数具有从1到n的分母和从1到n-1的对应分子m(其中m和n是整数)。
42.多个整数可以包括每个不可约分数或由其组成(通常连同0和1),不可约分数具有是从i到n的整数i的倍数的分母和从1到n-1的分子m,其中i》1。在每个工作腔室具有相同冗余度的情况下,i可以等于冗余度。我们所说的“冗余”是指同一组工作腔室中以相同相位运行的工作腔室的数量(并因此给出了与轴角等效的流体排量)。
43.根据前述的方法,其中多个离散分数中最小的非零分数通常是1/n,其中该多个离散分数中的第二小的分数是1/(n-1),其中n是整数。
44.可能的是,选择多个分数中最小的非零分数,使得在可旋转轴的目标操作旋转速度下,工作腔室容积的有效循环的重复模式的频率高于预定的最小允许频率。
45.可能的是,考虑到两个或更多个工作腔室具有相同相位或者在两个或更多个工作腔室之间存在不均匀相位差的情况,选择多个离散分数中的最小非零部分。这可以包括处理表示工作腔室的相对相位的数据和/或考虑到一些工作腔室可能具有同步的工作腔室容积循环。该方法可以包括计算在成组的工作腔室中产生重复模式所需的连续工作腔室的数目,通常考虑到该成组的工作腔室的相位差和/或冗余度。
46.然而,可能的是,通过模拟或实验确定量化需求信号的离散分数(有效循环分数)和/或多个离散值(在适用的情况下)。在这种情况下,响应于模拟或实验,将量化需求信号的离散分数和/或离散值包括在多个离散分数(或值)中,该模拟或实验表明所得到的高压歧管压力或阀激活电流或其他信号的频率含量满足一个或多个可接受的频谱标准,并且/或者其中低于截止频率的频率含量低于阈值,或者其中发现选择有效循环和无效循环的影响是可接受的(例如,响应操作者的反馈或对设备的一个或多个部分的运动的测量或计算),或者如果它们不满足这些标准,则将其排除在外。因此,可以通过试错建立多个离散分
数和/或离散值。最小频率可以通过实验或模拟来确定(无论是在设计、制造还是运行期间),并用于计算最大分母n。
47.量化需求信号的离散分数(有效循环分数)和/或多个离散值(在适用的情况下)不需要在机器制造或调试之前或甚至在操作之前确定,而是可以在运行期间计算和/或在考虑到预先确定的参数(例如,工作腔室相位和冗余数据、最小频率)和/或当前测量的参数(例如,轴旋转速度)的情况下实时计算。
48.可能的是,多个离散分数和/或多个离散值(在适用时,将需求信号量化到多个离散值)响应于可旋转轴的旋转速度或设备的另一操作参数而变化。即,多个离散分数(或值)可以是一组离散分数(或值),并且可以在可旋转轴的不同旋转速度或设备的另一操作参数的不同值或范围下使用不同组的离散分数(或值)。该方法可以包括当可旋转轴的旋转速度超过阈值时,从使用第一多个离散分数(或值)切换到第二多个离散分数(或值)。
49.可能的是,所使用的多个离散分数(或值)可以响应于连接到高压歧管的成组的工作腔室中的工作腔室的数量和相位的变化而变化。
50.可能的是,通过比较排量需求的时间历程(例如,接收到的排量需求信号)与实际排量的时间历程,例如通过根据排量需求信号增加累加器和根据排出的工作流体的量递减累加器,来确定工作腔室是否经历工作腔室容积的有效循环或无效循环。
51.该方法在第三方面扩展到计算多个离散分数的方法,以用于第一方面的方法或第二方面的设备中,该方法包括:输入最小允许频率、可旋转轴旋转的目标操作速度以及指示机器的工作腔室之间的数量和/或相位差、和/或一组工作腔室之间的相位差的数据(其中所述组限定为所述组的工作腔室共享公共液压输出部);计算在有效循环之间的工作腔室决定点的整数n(通常为最大整数),该有效循环将导致产生仅超过最小允许频率的缸体激活频率,并且在多个离散分数中包括有1/n。
52.该方法还包括在去除重复值之后,在多个离散分数中包括具有至多为n的整数的分母和至多为n-1的整数的分子的多个分数。
53.该方法可以包括从具有都是整数的整数倍(大于1)的分母的多个分数中形成该多个离散分数。
54.该方法可包括形成多个离散分数,该多个离散分数包括分数1/i、1/2i并通常也包括1/3i,其中i为整数。i可以等于工作腔室的冗余度。
55.通常,会去除重复值。分数可以重新表示为不可约分数。分数可以转换为二进制数。
56.该方法可包括从多个离散分数中去除一个或多个离散分数,以避免产生频率分量低于特定值的重复缸体激活模式。这可能是由于不相等的缸体相位引起的频率分量。
57.该方法还可以包括验证候选的多个离散分数(例如,有效循环分数)是否与输出流体排量的所得离散水平相关联的步骤,该离散水平具有足够的分辨率,使得能够满足一个或多个操作平稳性标准。如果候选的多个分数不会导致足够平稳的操作(由于离散分数之间的间隔),则该方法可包括生成错误或故障方法、重新计算多个离散分数或重新指定液压机(例如,决定使用具有更多工作腔室的液压机)。在适用的情况下,离散分数可用作量化的需求信号的值和/或多个离散分数。
58.该方法可包括将多个离散分数存储在固态存储设备上以在操作期间进行检索的
步骤。
59.由工作腔室执行的工作腔室容积的有效循环和无效循环包括给定有效循环分数的有限时间段模式。例如,有效循环和无效循环的模式可以具有至少0.001s、或至少0.005s、或至少0.01s的最小时间段,并且/或者可以具有至多0.1s、或至多0.5s的最大时仅段。
60.在示例机器中,最小时间段可以是2.4ms(由所有12个等距间隔开的缸体以2500rpm(转每分钟)的最大速度的激活频率引起)。本领域技术人员将理解的是,在原动机的更高的速度或更多缸体的情况下,最小时间段可以是1ms(或更小)。
61.在主要实施例中,优选地去除低于5hz的所有频率,因此对应于0.2s的时间段。
62.通常,根据可接受的频率含量来选择可接受时间段的范围。对于需要去除低于某个值的所有频率的应用,有必要指定最大可接受时间段。从该最大可接受时间段开始,将根据缸体的数量和原动机的操作范围来选择有效循环分数的可接受范围。例如,可接受的有效循环分数的范围可选择为包括使用整数分子和整数分母值生成的多个离散的有效循环分数。可以根据可旋转轴的旋转速度来选择多个有效循环分数的分母,例如,可以选择分母使得该时间段高于最小时间段。具有短时间段是有益的,因为这对应于更频繁的工作腔室容积的有效循环或无效循环,并且因此从有效循环和无效循环的模式中去除低频率含量。通常,有限个分数的分母的可接受值根据可旋转轴的旋转速度而变化。然而,可能的是,可用的有效循环分数不随原动机速度变化,并且被选择为在最小原动机速度下去除低频率含量。因此,更高速度的频率含量也是可接受的。
63.对于给定的有效循环分数,执行有效循环或无效循环的工作腔室的频率与可旋转轴的旋转速度(每秒转数)成比例。对于给定的有效循环分数,工作腔室容积的有效循环和无效循环的序列不取决于轴速度。然而,序列的各部件之间的时间确实会随着轴速度而变化。因此,由有效循环和无效循环的特定序列产生的频率与可旋转轴的旋转速度成比例。
64.重要的是有效腔室或无效腔室的重复模式,而不是具体的缸体是否被启用或禁用。例如,序列0,0,0,1,0,0,0,1具有与序列1,1,1,0,1,1,1,0相同的基本频率。
65.因此,本发明认识到,液压机将产生具有强度峰值的振动,该峰值所处的频率取决于由工作腔室执行的有效循环和无效循环的模式,并且对于给定的有效循环和无效循环序列,该峰值与可旋转的轴的旋转速度成比例。
66.该方法可包括选择最小允许频率(例如5hz、10hz),然后创建多个离散的有效循环分数(例如fd和/或在适用的情况下量化的需求信号的值)的量化列表,所述分数选择为导致有效循环和无效循环的一个或多个模式,其中所述模式仅具有高于最小允许频率的频率含量。该控制器可构造成确定最小允许频率(例如5hz、10hz),然后创建多个离散分数(例如fd和/或在适用的情况下量化的需求信号的值)的量化列表,所述值选择为导致有效循环和无效循环的一个或多个模式,其中所述模式仅具有高于最小允许频率的频率含量。
67.离散值(在量化列表中的)通常对应于(执行有效循环的工作腔室的)离散分数,但这不是必要的,因为需求信号不需要用排量分数来表示。
68.离散分数(和/或离散值)可以取决于机器中缸体的数量和/或机器的可旋转轴的旋转操作速度(因为可旋转轴的旋转速度和缸体的数量将影响给定需求值的频率)。对于每个有效循环分数,可以计算出存在的最小频率。随着机器运行时,将(经过滤的)需求信号传
送到液压机的控制器。然而,连续的需求信号的计算和需求信号的量化和/或离散的有效循环分数的选择都可以在控制器本身内部计算。
69.最低允许频率可能低于20hz,甚至低于10hz。本发明对于避免这些种类的低频率特别有用。
70.本发明在第四方面扩展到一种固态存储设备,该固态存储设备存储根据本发明第三方面的方法计算的多个离散分数。第一方面的方法可以包括读取第四方面的固态存储设备的离散分数。第二方面的设备可以包括与控制器进行电子通信的第四方面的固态存储设备。
71.该设备可以是车辆,通常是工业车辆。例如,该设备可以是挖掘机、伸缩臂叉车或反铲装载机。可能的是,该设备是小汽车、公共汽车、卡车、叉车和/或轮式装载机。可能的是,该设备是注塑成型机或水射流切割单元。该设备可以是液压动力单元。该设备可以包括液压变速器。该设备可以是液压混合动力车辆变速器。该设备可以是可再生发电机(比如,风力涡轮机发电机或波浪或潮汐发电机)。该设备可以包括无线电收发器。该设备可以包括电池。该设备可以包括用于充电的电端子。该设备可以是轨道车辆。该设备可以是(非工业)乘用车辆。然而,可能的是,该装置不是车辆。
72.液压机可以包括多于6个或多于8个的工作腔室。可能的是,液压机包括12个以上的工作腔室。
73.可能的是,该设备构造为响应于液压回路或一个或多个致动器的测量特性来计算需求信号,通常,该设备包括控制器,该控制器构造为响应于液压回路或一个或多个致动器的测量特性来计算所述需求信号。
74.本发明还扩展到操作所述设备的方法,其包括响应于液压回路或一个或多个致动器的测量特性来计算需求信号。
75.通常,该方法包括检测一个或多个液压致动器中的至少一个的流量和/或压力需求,或者基于一个或多个液压致动器的压力和/或流量需求接收指示所需压力或流量的需求信号,以及响应于一个或多个液压致动器,控制液压流体从与该一个或多个液压致动器流体连接的一个或多个工作腔室的组中的每一个的流出或流入。
76.该方法可以包括响应于测量的压力而调节一个或多个工作腔室的组的排量。因此,该设备通常具有负流量控制回路。可选地,设备可包括前馈控制器,其构造为响应于液压回路或一个或多个致动器的测量特性的前馈来计算需求信号(例如,除了反馈控制器之外或替代反馈控制器,该反馈控制器构造为响应于液压回路或一个或多个致动器的测量特性的反馈来计算需求信号)。
77.例如,可以响应于压力测量值和/或流量测量值来确定需求信号。该需求信号可以包括压力测量值,压力测量值在节流阀处测得。该需求信号可以指示在可旋转轴的每转一次待由一个或多个工作腔室的组排出的液压流体的最大排量的分数。这在本文中称为fd。(每转一次最大排量的分数)。如果每个工作室腔室排出最大可能体积的工作流体,则fd等于有效循环分数。
78.原动机通常与液压机驱动接合。原动机具有可旋转轴,该可旋转轴通常联接到ecm的可旋转轴(并且原动机可以对其施加扭矩)。原动机(例如,发动机)和液压机可以具有共同的轴。
79.在设备是挖掘机的情况下,多个液压致动器通常包括用于移动履带(例如,用于车辆的移动,通常为挖掘机的移动)的(例如,至少)两个致动器、旋转致动器(例如,马达)(例如,用于相对于挖掘机的基底使挖掘机的驾驶室旋转,该基底通常包括履带)、至少一个冲压(ram)致动器(例如,用于控制挖掘机臂,例如,用于吊杆和/或操纵杆)以及至少两个另外的致动器(例如,用于控制诸如铲斗之类的工具的移动)。
80.一个或多个低压歧管可以延伸到液压机的工作腔室。一个或多个高压歧管可以延伸到液压机的工作腔室。液压回路通常包括在所述一个或多个工作腔室的组与所述一个或多个致动器之间延伸的所述高压歧管。低压歧管可以是一个或多个所述液压回路的一部分。低压歧管54和高压歧管58是指歧管中的相对压力。
81.可能的是,至少低压阀(任选地为高压阀,任选地为低压阀和高压阀)是电子控制阀,并且该设备包括控制器,该控制器控制(例如,电子控制)阀与工作腔室容积的循环成相位关系,从而确定每个工作腔室在工作腔室容积的每个循环上的液压流体净排量。该方法可以包括以与工作腔室容积的循环成相位关系的方式来控制(例如,电子控制)阀,从而确定每个工作腔室在工作腔室容积的每个循环上的液压流体净排量。
82.一个或多个液压致动器的组的流率和/或压力要求例如可以通过测量流到或来自一个或多个液压致动器的组的液压流体的流率,或者测量在一个或多个液压致动器的输出部或入口中或者输出部或入口处的液压流体的压力来确定。流率和/或压力要求可由降低或低于预期值的一个或多个测量出的流率和/或测量出的压力确定。流率和/或测量出的压力从预期值减小,表明流到或来自一个或多个液压致动器组的流率不足正在发生。例如,可以确定流到致动器的液压流体的流率低于预期值(例如,目标值),并且流到致动器的液压流体的流率可以响应于此而增加。可以确定来自致动器的液压流体的流率高于预期值(例如,目标值)(例如,随着臂或其他重量减少),并且来自致动器的流率可以响应于此而减小。可能的是,在一个或多个液压致动器处检测到压力增加或减小,并且控制连接到一个或多个液压致动器的一个或多个工作腔室的组以改变(例如,增加或减小)从一个或多个工作腔室的组到一个或多个液压致动器的液压流体的流量,或者反之亦然。
83.一个或多个工作腔室的组可以动态地分配给一个或多个液压致动器的相应组,从而例如通过例如在控制器的控制下打开或闭合电子控制阀(例如,下面描述的高压阀和低压阀)来改变哪一个或多个工作腔室连接到(例如,一组)液压致动器。可以将(例如,一个或多个)工作腔室的组动态地分配给(相应的)(例如,一个或多个)致动器的组,从而例如通过例如在控制器的控制下打开和/或闭合(例如,电子控制)阀来改变机器的哪些工作腔室联接到哪些液压致动器。通过调节连接到一个或多个液压致动器的一个或多个工作腔室的净排量,可以调节穿过每个工作腔室(和/或每个液压致动器)的液压流体净排量。一个或多个工作腔室的组通常通过所述歧管连接到一个或多个所述液压致动器的相应组。
84.该设备通常包括控制器。该控制器包括与存储器电子通信的一个或多个处理器,以及存储在存储器上的程序代码。控制器可以是分布式的,并且可包括两个或更多个控制器模块(例如,两个或更多个处理器),例如,控制器可包括液压机控制器(包括与存储器电子通信的一个或多个处理器,以及存储在存储器上的程序代码),其控制液压机,以及设备控制器(包括与存储器电子通信的一个或多个处理器,以及存储在存储器上的程序代码),该设备控制器控制设备的其他部件(例如,控制阀以改变液压流体的流动路径)。
85.可能的是,每个工作腔室所接受或输出的液压流体的流量是独立可控的。可能的是,通过选择每个工作腔室在工作腔室容积的每个循环上的液压流体的净排量来独立地控制每个工作腔室所接受或产生的液压流体的流量。该选择通常由控制器执行。
86.流量和/或压力需求可以通过测量液压致动器的输入部处的液压流体的压力来感测。在液压致动器是液压机的情况下,可通过测量例如旋转轴的旋转速度或冲压部的平移速度或接头的角速度来感测流量需求。可以对测量出的流量压力求和,或者找到测量出的压力或流量的最大值。
87.基于液压致动器的压力和/或流量需求指示所需压力或流量的需求信号可以是表示液压流体的流量、或液压流体的压力、或机器的轴上的扭矩或由机器驱动的液压致动器的轴上的扭矩、或机器的动力输出的信号,或指示与一个或多个液压致动器的压力或流量要求相关的需求的任何其他信号。
88.通常,液压机在泵操作模式下可作为泵操作,或者在马达操作模式下可作为马达操作。可能的是,液压机的一些工作腔室可以是泵(因此一些工作腔室可以输出液压流体),而液压机的其他工作腔室可以是马达(因此一些工作腔室可以输入液压流体)。
89.可能的是,离散值的值随着可旋转轴的旋转速度而变化,并且选择为当液压机控制一个或多个工作腔室的组的净排量时避免产生不期望的和/或不可接受的频率,以实现量化需求。
90.各个工作腔室在工作腔室容积的每个循环中是可选择的,例如,通过阀控制模块,以排出预先确定的固定体积的液压流体(有效循环),或经历无效循环(也称为空转循环),其中,没有液压流体的净排量,从而使机器的净流体吞量能够动态地匹配由需求信号指示的需求。控制器和/或阀控制模块能可操作为通过执行算法(例如,对于工作腔室容积的每个循环)使各个工作腔室经历有效循环或无效循环。该方法可包括执行算法以确定各个工作腔室是否经历有效循环或无效循环(例如,对于工作腔室容积的每个循环)。该算法通常对(例如,量化的)需求信号进行处理。
附图说明
91.现在将参照以下的附图来说明本发明的示例性实施例,在附图中:
92.图1是根据本发明的设备的示意图,其包括电子换向液压机和致动器;
93.图2是电子换向液压机的示意图;
94.图3说明了由图2的电子换向液压机执行的过程,以顺序地确定每个缸体的净排量;
95.图4是实现量化的数据处理示意图;
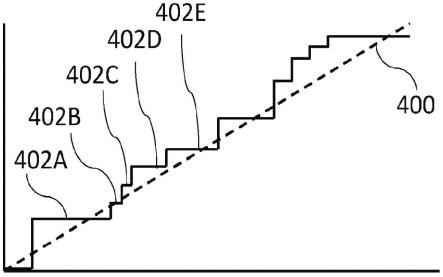
96.图5是响应于接收到的需求信号的量化输出随时间变化的曲线图;
97.图6是用于创建量化表(多个离散分数)的过程的流程图;以及
98.图7a到7c示出了有效缸体的分数随排量需求fd的变化(7a)、部分冲程尺寸作为最大分数随排量需求fd的变化(7b)和比例因子随排量需求fd的变化(7c)。
具体实施方式
99.参照图1,例如为液压挖掘机或其他车辆的设备1包括电子换向液压机10(以下简
称“ecm”),该电子换向液压机包括工作腔室的第一组10a和第二组10b,每组分别经由第一流体连接部21a和第二流体连接部21b流体连接到阀块8,并使得工作腔室的组可以单独连接到高压歧管22a、22b或22c中的一个或多个。因此,如该图1实施例所示,ecm 10包括两组10a和10b,每组包括一个或多个工作腔室,但是工作腔室的数量在图中未示出。ecm 10起到所述液压机的作用,下面将参考图2进一步描述。ecm可以是泵或马达,并且在该示例中可以作为泵或马达操作。ecm通过旋转轴4由原动机2驱动。低压歧管6从储罐延伸到ecm的低压侧输入部。在高压侧,ecm具有阀块8,可致动该阀块以选择性地将电子换向机的一个或多个工作腔室的不同组10a、10b连接到高压歧管22a、22b和22c,从而改变哪些工作腔室连接到每个高压歧管。连接到高压歧管的所有工作腔室(无论是组10a还是组10b,或同时两个组,或一个或多个其他组)(以便它们将工作流体排入同一高压歧管或从同一高压歧管排出)一起起到通过液压回路连接到一个或多个液压致动器的一个或多个工作腔室的组的作用,并且它是指连接到特定的一个或多个致动器的组中的一个或多个工作腔室的工作流体的净排量,该特定的一个或多个致动器被一起控制以响应于需求信号来控制或响应致动器。本发明同样适用于无法选择改变工作腔室对致动器的分配的情况。这些高压歧管中的每一个延伸到致动器,比如另一液压机11。机器11可以是固定排量的,也可以是可变排量的,带有电子或机械(液压)致动和控制的阀,其通过另一轴14来驱动诸如为车辆的一个或多个车轮之类的负载12,或另一种液压致动器16、18,例如挖掘机的铲斗、或柱塞等。致动器可以仅起到贮槽的作用或仅起到液压流体的源的作用,但是根据致动器的致动方向,一些或全部致动器可以起到贮槽或源的作用。当驱动致动器时,连接到致动器的ecm的工作腔室进行泵送循环,当由致动器驱动时,连接到致动器的ecm的工作腔室进行机动循环。
100.该设备包括设备控制器100,其通过一个或多个手动控制部接收来自操作者的控制信号,并接收反馈信号,比如致动器位置信号,或来自各个液压致动器11、16、18和/或高压歧管22a、22b、22c和/或流体连接部21a、21b的压力信号。设备控制器100通过计算工作腔室的每个组的连续可变需求信号来处理这些信号并控制设备,并将这些信号发送到ecm。此外,在所示的示例中,设备控制器还可以周期性地向阀块8发送控制信号,以例如响应于当前或未来可能负载的变化来重新构造哪些工作腔室连接到哪些致动器,从而改变哪些工作腔室在一个或多个工作腔室的哪个组中。然而,阀块中的阀也可以经由液压操纵杆经由先导压力来驱动。
101.图2是图1所示的ecm实施例的部分的示意图,并示出了当前通过高压歧管54连接到一个或多个致动器的工作腔室的单个组。图2提供了关于第一组10a的细节,所述组包括具有缸体24和活塞28的多个工作腔室(示出了8个),该缸体具有由缸体的内表面限定的工作容积26,该活塞由偏心凸轮32从可旋转轴30驱动,并在缸体内往复运动以循环地改变缸体的工作容积。可旋转轴牢固地连接到驱动轴并随其旋转。轴位置和速度传感器34确定轴的瞬时角位置和转动速度,并且通过信号线36通知ecm控制器50,这使得ecm控制器能够确定每个缸体的循环的瞬时相位。
102.工作腔室各自与低压阀(lpv)相关联,该低压阀呈电子致动的面密封提升阀52的形式,该提升阀具有相关联的工作腔室并且可操作为选择性地密封从工作腔室延伸到低压液压流体歧管54的通道,该低压液压流体歧管可以将一个或若干工作腔室,或者实际上如在此所示的全部工作腔室连接到ecm的低压液压流体歧管。lpv是常开式电磁致动阀,当工
作腔室内的压力小于或等于低压液压流体歧管内的压力时,即在吸入冲程期间,该电磁致动阀被动地打开,以使工作腔室与低压液压流体歧管流体连通,但是在ecm控制器的主动控制下经由低压阀控制线路56可选择性地闭合,以使工作腔室与低压液压流体歧管脱离流体连通。该阀替代地可以是常闭阀。
103.工作腔室还各自与相应高压阀(hpv)64相关联,该高压阀各自呈压力致动的递送送阀的形式。hpv从其各自的工作腔室向外开放,并且每个都可运行成密封从工作腔室通过阀块8延伸到高压液压流体歧管22、58的相应通道,该高压液压流体歧管可以连接一个或若干个工作腔室,或者实际上如图2所示的所有工作腔室。hpv用作常闭式压力开启止回阀,当工作腔室内的压力超过高压液压流体歧管内的压力时,该hpv被动打开。hpv还用作常闭式电磁致动止回阀,一旦hpv通过相关联的工作腔室内的压力打开,ecm控制器可经由hpv控制线路62选择性地保持打开。通常,hpv不能由ecm控制器在抵抗高压液压流体歧管中的压力下打开。当高压液压流体歧管中存在压力但是工作腔室中不存在压力时,hpv可附加地在ecm控制器的控制下打开,或者可部分打开。
104.在泵送模式中,ecm控制器通过主动闭合通常在相关联的工作腔室的循环中的最大容积点附近的一个或多个低压阀,闭合通向低压液压流体歧管的路径,从而在随后的压缩冲程上穿过相关联的高压阀导出液压流体(但不主动保持高压阀打开),来选择由液压马达从工作腔室到高压液压流体歧管的液压流体的净排量率。该ecm控制器选择lpv闭合和hpv打开的数量和序列,以产生流动,或产生轴扭矩或动力,以满足所选择的净排量率。
105.在机动操作模式中,ecm控制器选择由ecm经由高压液压流体歧管排出的液压流体的净排量率,在相关联的工作腔室的循环中的最小容积点之前不久主动地闭合一个或多个lpv、闭合通向低压液压流体歧管的路径,这导致工作腔室中的液压流体被收缩冲程的其余部分压缩。当横跨相关联的hpv的压力平衡时,相关联的hpv打开,并且少量液压流体通过该相关联的hpv被引出,该相关联的hpv由ecm控制器保持打开。然后,该ecm控制器主动将保持该相关联的hpv打开,通常直到接近在该相关联的工作腔室的循环中的最大容积,将来自高压液压流体歧管的液压流体接纳到工作腔室并且向可旋转轴施加扭矩。
106.以及确定是否在逐个循环的基础上闭合lpv或保持lpv打开,该ecm控制器可操作为相对于变化的工作腔室容积来改变hpv的闭合的精确相位,并且由此选择从高压液压流体歧管到低压液压流体歧管的液压流体的净排量率,反之亦然。
107.低压流体连接部6和高压流体连接部21a上的箭头表示机动模式下的液压流体流动;在泵送模式下,流动是反向的。卸压阀66可保护ecm内的组免受损坏。
108.在正常操作中,ecm散布工作腔室容积的有效循环和无效循环,以满足接收到的需求信号所指示的需求。
109.图3示出了由ecm控制器50执行的过程,以顺序地确定每个缸体的净排量;过序开始200,然后将多个存储的可变算法累加器设置202为零。为一个或多个缸体的每个独立控制的组(作为一个或多个工作腔室的组)保持可变算法累加器,使得每个组可以响应独立的需求信号。“算法累加器”在计算机科学中更普遍地称为“累加器”,但此处使用不同的术语来区分完全不同的液压累加器的概念。可变算法累加器存储了由排量需求表示的液压流体排量与实际排量之间的差异。
110.然后ecm的可旋转轴旋转,直到它达到204单个缸体的决定点。对于图1所示的示
例,具有八个缸体,它们隔开的相位相等,而没有任何冗余,因此每个决定点将被可旋转轴旋转以45度隔开。在各个决定点之间发生的实际时间段将因此是可旋转轴的用于旋转45度所需的时间段,该时间段与可旋转轴的转速成反比。然而,在一些实施例中,在工作腔室激活决定点之间会有不同的相位,并且可以有多个工作腔室,这些工作腔室可以独立控制,但总是具有相同的相位。
111.在每个决定点处,ecm控制器针对ecm的工作腔室的每个组读取206排量分数fd形式的需求信号,该排量分数fd是从另一控制器(例如,设备控制器)接收的或者是使用来自液压回路的信号在内部计算的。对于工作腔室的每个组,ecm控制器然后计算208可变算法总和,其等于相关算法累加器加上该组的需求排量。该总和考虑了自上一个决定点以来的时间段,考虑到可旋转轴的旋转速度的变化和工作腔室决定点之间的相位的可能变化,该时间段可以是可变的。
112.接下来,参考工作腔室状态的数据库220以检查210正在考虑的缸体的状态。对于每个缸体24,如果发现缸体损坏或者是未连接到一个或多个致动器的不同缸体组的一部分,则此时不对该缸体采取进一步的动作。一旦已经考虑了在决定点必须进一步考虑的每个缸体(如果有的话),那么一旦到达下一个决定点,该方法就从步骤204重复。
113.对于决定点相关的每个缸体,将工作腔室的相关组的算法总和与阈值进行比较212。当考虑的唯一选项是没有净排量的无效循环或者是在其中选择了缸体的液压流体的最大排量的全排量有效循环时,该值可以简单地为缸体可排出的液压流体的最大容积。然而,阈值可能更高或更低。例如,它可能小于单个缸体的最大排量,例如,在期望执行部分循环的情况下,其中仅排出缸体的最大排量的部分。
114.如果算法总和大于或等于阈值,则确定缸体24将经历有效循环214。替代地,如果算法总和不大于或等于阈值,则确定缸体24在其缸体24工作容积的下一个循环中将是无效的216,并且将具有为零的净排量。累加器值将根据从算法总和中减去的排量来计算218。
115.然后将控制信号发送到所考虑的缸体24的低压阀52和高压阀64,以使缸体经历确定的有效循环或无效循环。(在泵送的情况下,高压阀可能不是电子控制的,并且控制信号只涉及低压阀)。对于与所考虑的缸体相关联的特定阀,控制信号横跨相应的(低压)控制线路56和(高压)控制线路62传送。
116.对于工作腔室(缸体)的每个组,该步骤有效地考虑了由排量需求信号所代表的排量需求,以及在由排量需求信号所代表的先前排量和由ecm控制器所确定的先前净排量之间的差值(在此情形中,形式为所存储的误差),然后将缸体的液压流体的时间平均净排量与排量需求信号所代表的时间平均排量相匹配,如果算法总和等于或超过阈值,则使缸体经历有效循环,在该有效循环中它产生了液压流体的净排量。在这种情况下,将误差值设定为总和减去有效缸体的排量。替代地,如果算法总和不等于或超过阈值,则缸体就无效,并且算法总和不被修改。
117.当一个或多个缸体达到下一个决定点时,该过程从步骤204重新开始。
118.因此可以看出,对于工作腔室的每个组,算法累加器保持着所需的排量与实际发生的排量之间的差异记录。在每个循环中,将所需的排量加到排量误差值,并减去实际选择的排量。算法累加器有效地记录了在所需的排量和所提供的排量之间的差值,并且无论何时该累加的差异超过阈值,就会发生有效循环。由于对连接到同一高压歧管的一个或多个
缸体的每个不同组都保持了单独的算法累加器,所以可以独立地控制连接到相应致动器的每个高压歧管中的压力或流过每个高压歧管的流量。
119.本领域普通技术人员会理解的是,该排量确定算法的效果可以以若干方式获得。例如,不是从算法累加器变量中减去所选择的排量,而是可以在一段时间内将所需的排量和已递送的排量进行相加,并且选择单个缸体的排量来保持两者的均匀匹配。
120.可以看出,当需求信号较低时,由于周期性的有效循环在无效循环之间周期性地散布,该算法将导致高度脉动的压力波动。如果需求信号是最大需求的分数1/n,并且在该分数上保持恒定,那么工作腔室容积的每第n个循环将是有效循环,其余的为无效循环,并且将存在脉动流量,其频率为工作腔室激活决定点204的频率除以n。例如,当需求信号接近但小于最大需求的100%时,也会有类似的效应,因为偶尔的无效循环将周期性地发生在其他连续的有效循环之间。
121.尽管这些振动通常以相对低的振幅开始,但是振动的振幅可以随着时间的推移增加,特别是如果振动的频率处于(或接近)车辆(或车辆的部分)的共振频率。如果振幅增加超过预定的最大振幅,那么这些振动会造成损坏。
122.根据本发明,传递给ecm控制器并用作上述算法输入的需求信号是量化的,使得它仅具有预定组离散值中的一个,如我们将解释的,这些离散值的选择是为了避免产生超过预定长度的缸体激活的重复模式,因此频率分量低于截止频率。
123.图4是由设备控制器100和ecm控制器50实施的数据处理的示意图,它们一起实现了本发明。对于本领域的技术人员来说显而易见的是,设备控制器和ecm控制器的功能可以组合,或者进一步分布。设备控制程序模块300(由设备控制器执行的计算机代码表示)处理由设备控制器从致动器和高压歧管接收的反馈信号310、312、314。这些信号可以包括压力测量值、致动器位置或速度测量值等。设备控制器还接收操作者命令信号316,这些信号可以通过诸如触摸屏或键盘的使用者界面来输入,或通过诸如用于控制致动器(例如,用于控制挖掘机的液压致动器的操作和/或驱动车辆)的控制杆或操作杆的手动控制部来输入。该数据用于计算工作腔室的每个组的当前排量需求信号301a、301b、301c。在该示例中,将排量需求信号表示为fd(可旋转轴每旋转一次最大排量的分数)。这些信号然后由设备控制器数字处理,以使用滞后逻辑302a、302b、302c实现滞后,该滞后逻辑输出已部分处理的排量需求信号303a、303b、303c。
124.滞后对于防止相邻的量化步骤之间的震颤是有用的,并用于所有的量化方法。在没有积分项的系统中,比如在负流量控制系统中,滞后的程度特定于系统的顺应性和压力与排量之间的关系(在某些情况下,压力与排量之间的关系可能是比例增益)。当使用量化的有效循环分数且只有全泵送冲程可用时,滞后对于具有积分项的系统是无效的;它仅用于修改排量循环频率。在设计滞后系统时,优选地考虑到人工操作者将有效地补偿产生的和需要的液压流体的排量之间的微小误差,例如通过调节操纵杆位置来实现致动器位置。在一些实施例中,仅在排量需求减少时提供滞后,而不是在排量需求增加时提供滞后。这在下面描述的可变冲程容积实施例中特别有用。因此,被馈送到ecm控制器50并使用参照图3描述的算法处理的连续需求信号是量化的,并且通常还被处理以引入滞后。
125.然后对部分处理的排量需求进行量化304a、304b、304c。参考图5,不是将最初计算的排量需求信号400传递给ecm控制器50,而是将需求信号量化,即使其对应于多个不同的
排量分数402a、402b、402c、402d、402e等中的一个。这是参照存储了数据结构306的固态存储器执行的,该数据结构306设置了多个离散分数。有效循环分数也可以在运行期间计算,而无需存储表。量化的需求信号305a、305b、305c随后被传递到ecm控制器50。有效循环分数也可以在运行期间计算,而无需存储表。
126.选择离散分数以避免产生缸体容积的有效循环或无效循环模式,其频率含量低于确定的截止频率,假设可旋转轴的预定最小旋转速度。液压管线中的压力脉动将产生于缸体工作容积的有效循环和无效循环组成的启用模式中,并具有相同的频率含量。这种振动可以传送到部件。量化控制方法的目的是防止系统/车辆的机械部件(直接地或间接地,例如经由操作者的激励)以其固有频率被激励。如果以与机械部件的固有频率相同的频率启用缸体,则可能会出现这种情况,其中存在一些形式的路径(例如,机械联接路径),用于将振动从泵(或连接的软管/管道)传递到机械部件。
127.使用量化技术从缸体启用模式中去除频率,将防止ecm控制器对某些排量水平进行命令。排量水平可以用每轴旋转的流体体积或每轴旋转的流体最大排量的分数来限定。当连续排量水平需求不等于离散排量水平中的一个时,选择最近的离散排量水平,并且在连续排量需求与离散排量水平之间存在结果误差。因此,在这种情况下,泵的所需容积和递送的容积之间将存在误差。这在系统中不会成为问题,其中产生的流体的准确体积和递送的体积之间存在误差。
128.此外,人工操作者将有效补偿油需求容积和生产的容积之间的微小误差。操作者将调节操纵杆位置,以达到期望的致动器位置。
[0129]“最小频率”的重要性在于,在使用量化时,低于该频率的其他频率将不会出现在缸体的启用模式中。如果所选的“最小频率”高于部件的固有频率,那么机械部件就不会以其固有频率发生共振。
[0130]
为此,离散分数的组可以由分母最多为整数n的分数组成,其中n的选择是为了在轴旋转的预期速度下,在排量分数1/n下选择缸体容积的有效循环的频率高于截止频率。
[0131]
例如,如果一机器具有12个等间距的缸体,并以1000转/分钟的转速旋转,那么每(60/1000)/12=5毫秒就会做出缸体选择决定。如果最大的分母是5,缸体将每25毫秒执行一次有效循环,有效循环分数为1/5,因此出现的最小频率是40hz(赫兹)。这可以在以下缸体激活模式的示例中看到:
[0132][0133]
表1
[0134]
上表表明,当fd=1/n(在该示例中是5)时,会产生一个模式,每n个缸体重复一次。对于m/n,其中m和n都是整数,表示为不可约分数(即m和n除了1之外没有公约数),将再次出现序列长度为n的模式(在此期间,m个缸体经历了有效循环)。
[0135]
例如,允许的分数的组可以是每个分数m/n,它是不可约分数,其中n是从1到预定的最大整数(在该示例中是5),并且m小于n(对于n的每个值)。n=5的示例表如下所示:
[0136]
允许的fd:
[0137]
01/51/41/32/51/23/52/33/44/51 [0138]
表2
[0139]
更一般地,对于以最小运行转速r(每秒旋转数)均匀分布在轴周围的x个缸体,每n个缸体重复的模式将产生频率为xr/n的振荡。
[0140]
通过包含每个不可约分数m/n,其中每个m最大为n-1,而每个n最大为确定的最大值,可以生成具有更大的最大序列长度n的表。
[0141]
较大的重复模式长度(由n确定)将导致成比例的较低的频率,但表的长度较大。
[0142]
例如,对于n=12,对应的表将为:
[0143]
01/121/111/101/91/81/71/62/111/52/91/4
3/112/73/101/34/113/82/55/123/74/95/111/26/115/94/77/123/55/87/112/37/105/78/113/47/94/59/115/66/77/88/99/1010/1111/121 [0144]
表3
[0145]
在实践中,分数可以以二进制形式存储,这将需要根据存储的有效位的数量进行一些舍入。替代地,可以在不使用存储表的情况下计算排量分数。
[0146]
值得注意的是,在这些表中,最小的非零分数,因此由ecm实现的fd的最小值将为1/n、1/(n-1)、1/(n-2)
……
(直到序列中的下一个数字大于或等于2/n)。最大的非单位分数是(n-1)/n、(n-2)/(n-1)、(n-3)/(n-2)。
[0147]
最大排量带给出了表中出现的最大排量间隙值,通常为1/n。这给出了量化后排量步长的粗略的指示,并因此给出了量化表的可接受程度。非常粗的排量步长可能会妨碍对执行器的精确控制,这在车辆应用中可能是特别值得关注的。
[0148]
在实验中,使用具有能够以低频(约3至15赫兹)振荡的操作者驾驶室的挖掘机,ecm驱动液压致动器流体连接到ecm,表2的量化表(最大序列长度为12,即n=12)不激活驾驶室,但给出足够粗的排量步长,以提供不可接受的使用者体验;将序列长度增加到24,即n=24,不激活驾驶室,但提供了可接受的使用者体验的排量步长;进一步将序列长度增加到36,即n=36,提供了可接受的步尺寸,但频率含量激活了驾驶室
[0149]
因此,在最小频率与量化排量水平的粗糙度之间存在折衷。在一些应用中,可以接受高达5%到10%的间隙。通过选择在不同相位处具有更多工作腔室的ecm,或选择具有更高最小轴速度(或约束最小轴速度)的原动机,并选择更高的最大分母,可以减小间隙。
[0150]
虽然在液压挖掘机的特殊情况下,驾驶室本身的共振是主要问题,但其他物体的激励和共振也是值得关注的。例如,车辆驾驶室的移动可能导致单个操作者的共振,这反过来可能导致操纵杆的非预期移动,从而可能使情况变得更糟。本发明对于避免低频共振效应特别有用。
[0151]
此外,一些排量分数可能被认为是不允许的,例如,由于激发进一步共振的风险,并且被认为是不允许的排量分数可以从排量分数表中删除。
[0152]
在表1的示例中,缸体在相位上等距分布,并且没有冗余(n个缸体构造成使得它们的容积循环间隔相位360/n
°
)。然而,已知的ecm中,工作腔室在相位上不等距间隔开,并且/或者存在冗余,我们指的是彼此具有相同相位的多个工作腔室。后者在缸体由多叶凸轮驱动的情况下是常见的,例如,这意味着一个或多个工作腔室循环发生在可旋转轴的单个旋转内。由于ecm的设计或由于在运行期间将工作腔室分配给不同的工作腔室的组,可能会出现不均匀相位的工作腔室。
[0153]
例如,ecm具有24个相位间隔相等(360/24=15
°
)的缸体。间隔120
°
的三个缸体的组具有共同的高压输出部,提供八个独立输出部。这些独立输出部中的三个连接到第一高压歧管,这些独立输出部中的四个连接到第二高压歧管,以及一个独立输出部连接到第三高压歧管。
[0154]
连接到第一高压歧管的9个缸体的相位可如下所示:
[0155][0156]
表4
[0157]
表4示出了在这个实施例中,连续的缸体之间的相位有时是30
°
,有时是60
°
。因此,在缸体之间存在不相等的相位。
[0158]
在表4中的示例中,重复的缸体相位模式长度为3。这个数字表示重复缸体相位需要多少缸体。缸体1和缸体2之间的相位差为30。缸体2和缸体3之间的相位差为30。缸体3和缸体4之间的相位差为60。然后重复该模式。由于重复该模式需要3个缸体,所以重复的缸体相位模式长度为3。
[0159]
机器也可以设计成具有重复相位(冗余)的缸体。下表所示为冗余度为2的6缸机器。
[0160]
缸体数量123456相位(
°
)00120120240240
[0161]
表5
[0162]
创建这种机器的量化表时,应考虑确保某个最大序列长度以预期方式限制最低频率的要求。
[0163]
如果所有工作腔室具有大于1的冗余度,那么可以将分数的分母选择为冗余度的倍数。因此,当冗余度为3时,该表可以包括分数1/3、1/6、1/9、1/12、1/15等。
[0164]
如果机器有不等距的工作腔室,一个选项是选择所有分母,这些分母是重复缸体相位模式长度的倍数。这将给出与相同缸体数量的等距机器相同的最小频率。
[0165]
因此,为了限制最低频率,具有不相等相位或冗余的机器或服务的允许排量水平将被降低。这将导致量化表中的进一步粗略。
[0166]
下表示出了12缸机器中工作腔室冗余的影响。该表指示了哪些缸体在1/3的排量分数下进行有效循环。
[0167]
[0168][0169]
表6
[0170]
表6表明,当冗余度为1时,每90
°
有重复的模式(即,可旋转轴每旋转一次,模式重复四次,因此是可旋转轴旋转频率的四倍);当冗余度为3时,每90
°
有重复模式(即,该模式在可旋转轴每次旋转时重复四次,因此是可旋转轴旋转频率的四倍)。但是,当冗余度为2时,启用缸体之间的相位差有时为120度,并且启用缸体之间的相位差有时为60度。这导致每180
°
有重复的模式(即,可旋转轴每旋转半圈,该模式重复一次,因此是可旋转轴旋转频率的两倍);在冗余度为1和冗余度为3的示例中,1/3的启用分数导致频率为轴旋转频率的4倍。1/3的启用分数导致轴旋转频率的2倍的较低频率。
[0171]
从该示例可以清楚地看出,当在量化表中使用不是冗余度的整数倍的分母时,会出现较低的频率。如果期望去除低于轴旋转频率2倍的频率,则在缸体相位具有冗余度为2的情况下,不可能使用1/3的启用分数。
[0172]
在这种情况下,冗余度》1的实施例的量化表由分母为冗余度的倍数的分数组成。例如,对于n至18,计算下列分数,然后排序并去除重复项:1/3、2/3、3/3、1/6、2/6、3/6、4/6、5/6、6/6、1/9、2/9、3/9、4/9、5/9、6/9、7/9、8/9、9/9、1/12、2/12、3/12、4/12、5/12、6/12、7/12、8/12、9/12、10/12、11/12、12/12、1/15、2/15、3/15、4/15、5/15、6/15、7/15、8/15、9/15、10/15、11/15、12/15、13/15、14/15、15/15、1/18 2/18 3/18 4/18 5/18 6/18 7/18 8/18 9/18 10/18 11/18 12/18 13/18 14/18 15/18 16/18 17/18 18/18.
[0173]
还原为不可约的分数,得到:
[0174]
允许的fd:
[0175]
01/181/151/121/92/151/61/52/91/44/155/18
1/37/182/55/124/97/151/28/155/97/123/511/182/313/1811/153/47/94/55/613/158/911/1214/1517/181
ꢀꢀꢀꢀꢀ
[0176]
表7
[0177]
更一般地,参考图6,确定量化表的过程从计算500重复缸体模式开始,这将取决于单个缸体的相对相位差,以及缸体之间是否存在以及在何种程度上存在冗余。在操作之前(如图6所示,例如通过模拟或实验),或者在操作期间,也可以考虑到破损的缸体。在简单的示例中,没有冗余,并且每个缸体的相位相等地分开,则重复的相位差只是缸体之间的相位间距。如果缸体的间距不相等,则应通过识别产生重复相位差模式所需的缸体数量,然后对所有缸体之间的相位差求和来计算重复模式。这用于确定工作腔室的重复布置之间的相位差。在表4和表5的示例中,这是120
°
。对于具有c个等距缸体且具有冗余度r的机器,这是360*r/c。还确定了产生重复模式所需的缸体数量。在表4和表5的示例中,这是3。
[0178]
在下一步骤中,计算502排量分数的允许分母。这是使用最小预期操作轴转速和使用在先前步骤中计算的缸体数量和缸体重复模式之间的相位差来计算的,并且该步骤还包括最小可接受频率。由此,能够计算不会导致频率低于最小频率的重复模式的允许分母。在图6的示例中,冗余度为3,轴速度为1500rpm(转/分钟),最小频率为15hz,允许的分母为3、6、9、12、15。
[0179]
此后,使用这些分母计算504允许的fd值(即,选择作为可用定量之一的排量分数)。通常,对于每个允许分母n,量化表将包括每个m/n,其中对于n的每个值,m是从1到n的每个整数。
[0180]
接下来,通过去除重复项506并将它们按数字顺序排序来处理计算出的分数。在可选的下一阶段中,一些fd值可以从计算的列表中过滤掉508(从该列表中去除),因为它们可以产生一些其他共振,例如设备的另一部件的共振。
[0181]
此后,存在验证步骤510,其中分析计算出的允许fd值以确定它们是否为使用者提供了足够平滑的操作。
[0182]
然后将计算出的fd值的最终集合存储512在存储器中并在机器操作期间使用。如上所述,对于不同的轴速度或设备的操作模式,例如当工作腔室的不同组连接到单独的高压歧管时,可以有不同的允许的fd表。
[0183]
在上述示例中,设备控制器100已经创建量化的需求信号,并且避免产生超过预定长度的缸体激活的重复模式,而不需要修改ecm控制器50或改变其所采用的算法(西格玛-德尔塔(∑-δ)算法)。因此,为了实现所需的排量,实际导致执行有效循环的精确缸体由ecm控制器确定。通常,它们不是预先确定的,并且根据轴旋转和所需排量的时间历程,在不同的使用中会有所不同。
[0184]
如所解释的,对于电换向液压机,散布工作腔室容积的有效循环和无效循环通常是有利的,以满足分段式排量需求,并且通常每个有效循环具有相同的净排量,这是每个工作腔室的最大净排量。然而,参照图7a至7c,现在将描述一实施例,其中通过修改阀定时来减小工作腔室在有效循环期间的冲程容积。尽管这在一些方面可能效率较低,但这可以与
上面讨论的量化方法相结合,从而产生一种可靠的机器,该机器抑制不期望的例如低频振动的产生,其可以提供宽的(并且在一些实施例中)连续范围的排量分数。
[0185]
在这些实施例中,通过改变低压阀和高压阀的主动控制的定时,在有效循环期间的净排量减小到最大排量的100%以下。这样做的方法从wo2004/025122中已知。例如,在泵送循环期间,低压阀的闭合时间可能会从其正常相位延迟,即在最大缸体容积点(上止点)之后不久。对于短暂的延迟,这会使排量略微减小。如果低压阀的闭合延迟到接近最小缸体容积点(上止点),则排量将减少到最大排量的一小部分。在机动循环的情况下,在膨胀冲程期间(从上止点到下止点),与其他情况相比,低压阀更早打开,高压阀更早闭合,减少了从高压歧管接收的工作流体的体积。该步骤通常发生在膨胀冲程的后期,稍微向前推进会稍微减小排量,而将其向前移动到最小缸体容积点后不久将大大减少净排量。
[0186]
在操作中,对于接收的(例如计算的或输入的)排量需求fd(x轴)的任何给定值,将fd乘以比例因子406,其旨在确保所选择的量化排量分数总是大于需求,从而通过减少每个缸体递送的体积(通过调节阀定时)仍然能够实现实际需求排量。图7a和7b采用比例因子。如图7a所示,将执行有效循环的缸体的分数如前所述进行量化,从而抑制不需要的频率分量的产生。然而,修改阀定时,使得总净排量更接近所需排量。期望每个缸体的冲程尺寸保持在尽可能接近100%,以便实现这一目的,用于“四舍五入”排量的比例因子本身必须是fd的函数,如图7c所示。通过使用这种类型的函数,可以将量化的fd保持在高于fd需求的近似固定的水平上,并因此确保冲程尺寸最大化。
[0187]
作为示例,图7b的y轴上的0.9对应于每个缸体的净排量,即当使用全冲程(最大冲程)时为递送体积的90%。作为缸体启用算法的结果,排量需求的量化有助于控制机器输出的频率含量,并且从图7a至7c的左侧可以看出,在低排量需求下,缸体激活频率不会下降到阈值(大约0.1)以下,相反,部分冲程容量会减小。这避免了产生具有非常低的频率含量的脉冲模式,同时仍然能够使输出排量与输入排量需求紧密匹配。在高排量需求下可以看到类似的效果,其中该方法避免产生缸体失效的低频模式。
[0188]
如上图和图7a所示,可以看出,发送到ecm控制器50的量化需求始终高于连续排量需求。其要求是量化的有效循环分数高于连续排量需求,并意味着部分冲程尺寸可以为1或更低,以准确地实现连续排量需求。如果量化需求低于连续排量需求,那么实现连续排量所需的部分冲程尺寸必须大于1,这是不可能的。
[0189]
尽管有可能在排量中留下无法满足的间隙,但如果确保量化的需求信号大于整个排量范围内的连续排量需求,则可以避免间隙。在该示例中,这是通过将连续排量需求乘以图7c所示的比例因子来实现的,但这不是唯一可能的方法。例如,可以对连续需求施加偏置,并且这也可以在整个排量范围内变化。
[0190]
在替代实施例中,通过选择最接近连续排量需求的离散有效循环分数,并且不施加向上滞后,而仅施加向下滞后,来解决间隙。这些方法防止了要求启用缸体的高于1的部分冲程分数。由于前面提到的原因,在整个排量范围内,优选的是,部分冲程尺寸尽可能接近全冲程尺寸。
[0191]
当所需的排量嘈杂时,滞后能够防止量化步长之间的跳跃。在图7a所示的情况下,其中fd(直线连续排量需求)信号是平滑的,可以省略滞后(或缩放),并且将其四舍五入到高于(直线连续排量需求)fd的最接近的量化步长就足够了。不幸的是,在现实中,需求信号
将包含噪声,因此需要一些滞后,这意味着决定向上改变步长与向下改变步长的阈值差异。如果存在噪声,对量化器施加滞后可防止在步长之间来回切换,前提是有足够的滞后。如果噪声水平大于步长本身,那么单靠滞后量是没有帮助的。
[0192]
替代且可能更好的方法是使用反冲力。当输入信号的变化率改变符号时,反冲力防止了输出信号改变。这通常有单一的参数,称为“死区(deadband)”,它是输入和输出之间的差异量,它将导致输出再次开始跟随输入。这种类型的信号处理通常会导致输入信号和输出信号之间的偏移。可以通过使用缩放来校正偏移,如图7c中的图表所示。缩放函数的类型为y=n/x 1,其中n是死区宽度的一半。
[0193]
在上述示例中,量化表中的离散值对应于将执行工作腔室容积的有效循环的工作腔室的离散分数。这是因为需求信号的单位是排量分数。然而,这并不是必需的。
[0194]
可以在本文公开的本发明的范围内做出进一步的变型和修改。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
