技术特征:
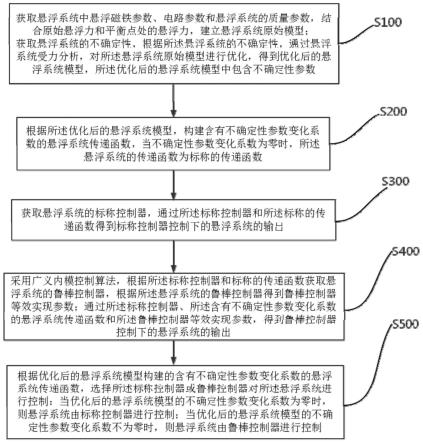
1.基于广义内模控制算法的磁浮列车悬浮系统的控制方法,其特征在于,具体包括以下步骤:s100:获取悬浮系统中悬浮磁铁参数、电路参数和悬浮系统的质量参数,结合原始悬浮力和平衡点处的悬浮力,建立悬浮系统原始模型;获取悬浮系统的不确定性,根据所述悬浮系统的不确定性,通过悬浮系统受力分析,对所述悬浮系统原始模型进行优化,得到优化后的悬浮系统模型,所述优化后的悬浮系统模型中包含不确定性参数;s200:根据所述优化后的悬浮系统模型,构建含有不确定性参数变化系数的悬浮系统传递函数,当不确定性参数变化系数为零时,所述悬浮系统的传递函数为标称的传递函数;s300:获取悬浮系统的标称控制器,通过所述标称控制器和所述标称的传递函数得到标称控制器控制下的悬浮系统的输出;s400:采用广义内模控制算法,根据所述标称控制器和标称的传递函数获取悬浮系统的鲁棒控制器,根据所述悬浮系统的鲁棒控制器得到鲁棒控制器等效实现参数;通过所述标称控制器、所述含有不确定性参数变化系数的悬浮系统传递函数和所述鲁棒控制器等效实现参数,得到鲁棒控制器控制下的悬浮系统的输出;s500:根据优化后的悬浮系统模型构建的含有不确定性参数变化系数的悬浮系统传递函数,选择所述标称控制器或鲁棒控制器对所述悬浮系统进行控制:当优化后的悬浮系统模型的不确定性参数变化系数为零时,则悬浮系统由标称控制器进行控制;当优化后的悬浮系统模型的不确定性参数变化系数不为零时,则悬浮系统由鲁棒控制器进行控制。2.如权利要求1所述的方法,其特征在于,所述步骤s100中,所述悬浮磁铁参数包括:真空中的磁导率、悬浮磁铁和轨道的极面积、悬浮磁铁线圈的匝数、悬浮间隙;所述电路参数包括:悬浮磁铁线圈中的实际电流、期望电流值、电流环的反馈增益、悬浮磁铁线圈的电阻;所述悬浮系统原始模型表达式为公式(1):其中:f
t
(t)表示原始悬浮力;f0表示平衡点处的悬浮力;是一个常数;μ0表示真空中的磁导率;s表示悬浮磁铁和轨道的极面积;n
turns
表示悬浮磁铁线圈的匝数;i0表示平衡点处的悬浮电流;δ0表示平衡点处的悬浮间隙;i(t)表示悬浮磁铁线圈中的实际电流;δ(t)表示悬浮磁铁和轨道之间的实际间隙;u(t)表示期望电流值;k0表示电流环的前馈增益;k
r
表示电流环的反馈增益;r表示悬浮磁铁线圈的电阻;是一个常数;表示i(t)的一阶导数;是一个常数;表示δ(t)的一阶导数;m表示悬浮系统的质量;表示δ(t)的二阶导数;g表示重力加速度。3.如权利要求2所述的方法,其特征在于,所述步骤s100中获取悬浮系统的不确定性,
根据所述悬浮系统的不确定性,通过悬浮系统受力分析,对所述悬浮系统原始模型进行优化,得到优化后的悬浮系统模型,包括:s110:获取悬浮系统的不确定性,根据所述悬浮系统的不确定性,通过悬浮系统受力分析,对所述原始悬浮力进行优化,得到优化后的悬浮力f
s
(t),其表达式为公式(2):f
s
(t)=f0 k
i
γi(t)-k
δ
γδ(t)
ꢀꢀꢀꢀ
(2)其中:γ表示不确定性参数;s120:通过优化后的悬浮力f
s
(t)对所述悬浮系统原始模型进行优化,得到优化后的悬浮系统模型,其表达式为公式(3):4.如权利要求3所述的方法,其特征在于,所述s110中,当悬浮系统的不确定性为垂直不确定性时,通过悬浮系统受力分析,对所述悬浮系统原始模型进行优化,得到带有垂直不确定性的优化后的悬浮力及垂直方向的不确定性参数,具体为:s111a:获取垂直不确定性的悬浮系统中悬浮磁铁参数和电路参数,根据悬浮系统受力分析,得到带有垂直不确定性的悬浮力f
n
(t),其表达式为公式(4):其中,f
n
(t)表示带有垂直不确定性的悬浮力;s112a:根据所述带有垂直不确定性的悬浮力和所述原始悬浮力,获得垂直差值δf
a
(t):s113a:根据所述垂直差值δf
a
(t)对所述带有垂直不确定性的悬浮力f
n
(t)进行等效变换,得到带有垂直不确定性的优化后的悬浮力f
s(a)
(t)及垂直方向的不确定性参数γ
a
,所述带有垂直不确定性的优化后的悬浮力f
s(a)
(t)的表达式为公式(6):
其中,垂直方向的不确定性参数5.如权利要求3所述的方法,其特征在于,所述s110中,当悬浮系统的不确定性为水平不确定性时,通过悬浮系统受力分析,对所述悬浮系统原始模型进行优化,得到带有水平不确定性的优化后的悬浮力及水平方向的不确定性参数,具体为:s111b:获取带有垂直和水平不确定性的悬浮系统中悬浮磁铁参数和电路参数,根据悬浮系统受力分析,对所述悬浮系统原始模型进行优化,得到带有垂直和水平不确定性的悬浮力f
nl
(t),其表达式为公式(7):其中,a表示磁极宽度的一半;δy(t)表示轨道与电磁铁之间横向错位的长度;s112b:根据所述带有垂直和水平不确定性的悬浮力f
nl
(t)设定水平方向的不确定性参数γ
b
,对带有垂直和水平不确定性的悬浮力f
nl
(t)进行泰勒展开,得到带有水平不确定性的优化后的悬浮力f
s(b)
(t):令则带有垂直和水平不确定性的悬浮力f
nl
(t)的等效式为公式(8):将f
nl
(t)进行泰勒展开,得到带有水平不确定性的优化后的悬浮力f
s(b)
(t),其表达式为公式(9):
6.如权利要求5所述的方法,其特征在于,所述s110中,当悬浮系统的不确定性为垂直和水平不确定性时,通过悬浮系统受力分析,对所述悬浮系统原始模型进行优化,得到带有垂直和水平不确定性的优化后的悬浮力及垂直和水平方向的不确定性参数,具体为:s111c:获取带有垂直和水平不确定性的悬浮系统中悬浮磁铁参数和电路参数,根据悬浮系统受力分析,得到带有垂直和水平不确定性的悬浮力f
nl
(t);s112c:根据所述带有垂直和水平不确定性的悬浮力f
nl
(t),获取其与带有水平不确定性的优化后的悬浮力f
s(b)
(t)之间的差值δf
c
(t),其表达式为公式(10):s113c:根据所述带有水平不确定性的优化后的悬浮力f
s(b)
(t)及所述差值δf
c
(t)对带有垂直和水平不确定性的悬浮力进行等效变换,得到带有垂直和水平不确定性的优化后的悬浮力f
s(c)
(t)及垂直和水平方向的不确定性参数γ
c
,其中,带有垂直和水平不确定性的优化后的悬浮力f
s(c)
(t)表达式为公式(11):
其中,垂直和水平方向的不确定性参数为:7.如权利要求3所述的方法,其特征在于,所述步骤s200包括:s210:根据所述优化后的悬浮系统模型,对其进行拉普拉斯变换可得公式(12):其中:i(s),δ(s),u(s)分别表示i(t),δ(t),u(t)经过拉普拉斯变换的表达式;si(s)表示i(s)的一阶导数;sδ(s)表示δ(s)的一阶导数;s表示拉普拉斯算子;根据上式,得到含有不确定参数的悬浮系统的传递函数,其表达式为公式(13):s220:根据预设的不确定性参数的取值范围,设计不确定性参数的表达式为公式(14):γ=γ0 γ
w
δ
γ
ꢀꢀꢀꢀ
(14)其中,δ
γ
∈[-1,1];γ
min
表示预设的不确定性参数的最小值;γ
max
表示预设的不确定性参数的最大值,δ
γ
表示不确定性参数变化系数。s230:将公式(14)的不确定性参数的表达式代入公式(13),得到含有不确定性参数变化系数的悬浮系统传递函数表达式(15):其中,w
n
=-k0k
i
γ
w
;w
m
=-k
δ
(r k0k
r
)γ
w
;;θ表示第一校正系数;k表示第二校正系数;s240:当不确定性参数变化系数δ
γ
为零时,公式(15)变换成标称的传递函数,其表达式为公式(16):8.如权利要求7所述的方法,其特征在于,所述步骤s300包括:s310:获取悬浮系统的标称控制器k0(s),其表达式为公式(17):
其中:k0(s)表示标称控制器;k
p
表示比例项系数;k
i
表示积分项系数;k
d
表示微分项系数;u(s)=1;s320:通过所述标称的传递函数p0(s)和所述标称控制器k0(s),得到标称控制器k0(s)控制下的悬浮系统的输出,即标称悬浮系统的实际悬浮间隙,其表达式为公式(18):其中:r0表示标称控制器控制下的悬浮系统的期望间隙;y0表示标称控制器控制下的悬浮系统的实际悬浮间隙。9.如权利要求8所述的方法,其特征在于,所述步骤s400包括:采用广义内模控制算法,根据所述标称控制器和所述含有不确定性参数变化系数的悬浮系统传递函数获取悬浮系统的鲁棒控制器,所述鲁棒控制器包括鲁棒控制器等效实现参数;通过所述标称控制器、所述含有不确定性参数变化系数的悬浮系统传递函数和所述鲁棒控制器等效实现参数,得到鲁棒控制器控制下的悬浮系统的输出,具体为:s410:采用广义内模控制算法,根据所述标称控制器和所述含有不确定性参数变化系数的悬浮系统传递函数获取悬浮系统的鲁棒控制器k(s),其表达式为公式(19):其中,n(s)u(s) m(s)v(s)=i;q(s)表示鲁棒控制器的新增参数;s420:根据所述鲁棒控制器k(s)和所述含有不确定性参数变化系数的悬浮系统传递函数对鲁棒控制器的新增参数q(s)进行等效实现,得到鲁棒控制器等效实现参数q'(s),其表达式为公式(20):其中:t表示第三校正系数;s430:通过所述标称控制器k0(s)、所述含有不确定性参数变化系数的悬浮系统传递函数p(s)和所述鲁棒控制器等效实现参数q'(s),得到鲁棒控制器控制下的悬浮系统的输出,即鲁棒控制器控制下的悬浮系统的实际悬浮间隙,其表达式为公式(21):其中:y表示鲁棒控制器控制下的悬浮系统的实际悬浮间隙;
r表示鲁棒控制器控制下的悬浮系统的期望间隙。10.如权利要求9所述的方法,其特征在于,所述步骤s420具体为:将所述鲁棒控制器k(s)和所述含有不确定性参数变化系数的悬浮系统传递函数表达式(15)进行线性分式变换,获得闭环传递函数为公式(22):t
er
(s)=f
l
(m
lft
(s),δ)=m
11
(s) m
12
(s)δ(i-δm
22
(s))-1
m
21
(s)
ꢀꢀꢀꢀ
(22)其中,t
er
(s)表示从r到e的闭环传递函数,e表示鲁棒控制器控制下的悬浮系统的实际悬浮间隙和鲁棒控制器控制下的悬浮系统的期望间隙之间的差值,即:e=y-r;其中,f
l
(m
lft
(s),δ)表示m
lft
(s)和δ构成的线性分式变换;δ=[δγ-δ
γ
];m
11
(s)=-m(s)(v(s)-q(s)n(s))[m(s)v(s)-n(s)u(s)-2q(s)m(s)n(s)]-1
;m
12
(s)=(v(s)-q(s)n(s))[m(s)v(s)-n(s)u(s)-2q(s)m(s)n(s)]-1
;;令:res(s)=m
12
(s)δ(i-δm
22
(s))-1m
21
(s),对其进行展开、化简后可得公式(23):当res(s)=0,可求得鲁棒控制器的新增参数表达式为:对所述鲁棒控制器的新增参数表达式进行等效实现,得到鲁棒控制器等效实现表达式
技术总结
本发明涉及磁浮列车悬浮系统控制技术领域,尤其涉及基于广义内模控制算法的磁浮列车悬浮系统的控制方法,包括以下步骤:获取悬浮系统中悬浮磁铁参数、电路参数和悬浮系统的质量参数,根据悬浮系统受力分析,建立悬浮系统原始模型,根据悬浮系统不确定性,对原始模型中进行优化,建立包含不确定性参数的悬浮系统模型,基于广义内模控制算法为悬浮系统设计了新的控制器,使系统在运行时,若不确定性参数变化系数为零,则系统由标称控制器进行控制;若不确定性参数变化系数不为零,则系统由鲁棒控制器进行控制。从而使得悬浮系统的跟踪精度更高、鲁棒性更强、抗干扰能力更好。抗干扰能力更好。抗干扰能力更好。
技术研发人员:王连春 李杰 杨清 周丹峰 余佩倡 陈强
受保护的技术使用者:中国人民解放军国防科技大学
技术研发日:2022.08.18
技术公布日:2022/11/11
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。