1.本实用新型涉及机器人关节模组领域,具体涉及一种机器人关节制动装置及机器人关节。
背景技术:
2.随着社会的高速发展和人类社会生活水平和质量的提高,机器人涉及到各行各业,而机器人关节模组尤其重要。目前协作机器人关节模组内部的制动器主要有两种类型:电磁制动器及插销式摩擦制动器。这两种类型的制动器都是靠摩擦制动,摩擦过程中会产生粉尘,可能对编码器和驱动器造成污染,从而造成编码器精度下降或者短路风险。对于电磁式制动器,目前已经有部分厂家采用了一定的密封结构实现对粉尘的密封。但是电磁式制动器一般轴向尺寸较大,自身重量大,不利于关节模组的轻量化及小型化。而插销式摩擦制动器还未见有协作机器人厂家对摩擦粉尘进行密封。插销式摩擦制动器的工作原理是:插销移动到预订位置使制动盘停止转动,制动盘与转轴或固定在转轴上的中间件摩擦,从而转轴停下来。目前,这种插销式摩擦制动方案都不带检测组件,如果在运动过程中插销意外到达使制动盘停止位置,则会造成摩擦副意外磨损甚至损坏。另一方面,如果需要制动时插销不能到达预订位置,则制动失灵,不能将模组锁定,将会造成安全事故。进一步,现有的关节模组制动器,摩擦面为圆环面,由于线速度的差异,圆环面外侧会更容易磨损。线速度差异导致的内外侧磨损不匀会导致制动力矩不稳定。现有的插销式摩擦制动器未密封,摩擦产生的粉尘会污染编码器及控制器,需对摩擦制动过程中产生的粉尘进行密封。需对制动及松闸两种工作状态进行检测,避免制动失灵造成安全事故或意外制动导致的制动装置损坏。
3.因此开发一种全新的机器人关节制动装置及机器人关节就显得很有必要。
技术实现要素:
4.为克服现有技术的不足,本实用新型的目的在于提供一种机器人关节制动装置及机器人关节,通过设置检测组件和密封端盖,实现实时检测制动状态并避免编码器与驱动器受到污染的目的。
5.本实用新型通过以下的技术方案来实现:一种机器人关节制动装置,包括:一转轴,安装于一机器人关节本体,且其相对所述机器人关节本体转动;一插销组件,位于所述转轴一侧且安装于所述机器人关节本体,所述插销组件包括一支架和与所述支架连接的一磁性推动件,一弹性件,组装于所述机器人关节本体,一插销,组装于所述弹性件上,使其通过所述磁性推动件的磁力或所述弹性件的弹力于所述插销的轴向方向上位移;一制动组件,套设并固定于所述转轴使所述制动组件随着所述转轴同步旋转,所述制动组件包括一摩擦柱,所述摩擦柱套设并固定于所述转轴,一制动盘,所述制动盘与所述摩擦柱为过盈连接,所述制动盘和所述插销于所述插销位移方向上的投影存在重叠区域,由此通过所述插销位移过程中干涉卡止所述制动盘刹停所述制动组件控制所述转轴停止。
6.进一步地,所述磁性推动件包括一电磁铁固定于所述支架,一推杆,活动连接于所述电磁铁,通过所述电磁铁的磁力推动所述推杆运动进而推动所述插销位移,且所述推杆和所述制动盘于所述插销位移方向上的投影不重叠。
7.进一步地,所制动组件还包括两个密封端盖,套设于转轴,分别抵接于摩擦柱两侧并覆盖所述制动盘两侧。
8.进一步地,所述密封端盖与所述制动盘之间设有交错面,使二者之间产生迷宫结构。
9.进一步地,所述弹性件为一弹簧,所述弹簧一端抵接于所述机器人关节本体内,另一端接抵于所述插销的中空底部,并且通过自身形变弹力推动所述插销位移。
10.进一步地,所述制动盘的外缘包括至少一卡齿,形成外凸部,且外凸部和所述插销于所述插销位移方向上的投影存在重叠区域,所述制动盘的内凹部和所述插销于所述插销位移方向上的投影不重叠。
11.进一步地,一检测组件,安装于所述机器人关节本体,所述检测组件和所述插销于所述插销的位移方向上的投影存在重叠区域,由此通过所述插销位移过程中碰触或离开所述检测组件,进而识别所述插销的位置,所述检测组件包括一底座,安装于所述机器人关节本体,以及安装于所述底座的一叶片开关,所述叶片开关包括一动叶片和一静叶片,通过所述插销推动所述动叶片位移,使动叶片和静叶片的分离和接触来检测所述插销的位置,进而识别机器人关节制动装置的工作状态。
12.进一步地,所述静叶片和动叶片为相对设置的两块弹片,所述动叶片的末端设有一接触部,所述接触部的厚度大于所述动叶片的厚度。
13.进一步地,所述制动盘为圆环状,其包括一开口,所述开口两端通过两个螺钉固定连接,通过调整所述螺钉的松紧程度来控制所述制动盘的内孔径,进而调整所述制动盘与所述摩擦柱之间的过盈量,从而调整制动力矩的大小。
14.本实用新型的另一种技术方案为:
15.一种机器人关节,包括:一机器人关节本体和安装于所述机器人关节本体上的如上述的机器人关节制动装置。
16.相比于现有技术,本实用新型能达到的有益效果为:
17.1、制动盘与摩擦柱采用周向摩擦的方式,不存在摩损不均匀的情况,制动力矩稳定可靠。
18.2、使用叶片开关检测插销位置状态从而判断制动装置是处于松闸工作状态还是制动工作状态,可以避免制动失灵导致安全事故;同时,若电磁铁意外失电,关节模组可以及时停止工作,防止摩擦副意外磨损甚至损坏。
19.3、密封端盖与制动盘交错面设计形成迷宫密封结构,对摩擦制动产生的粉尘进行密封。避免粉尘对编码器和驱动器造成污染,从而避免编码器精度下降或者驱动器短路风险。
附图说明
20.图1所示为本实用新型机器人关节的示意图;
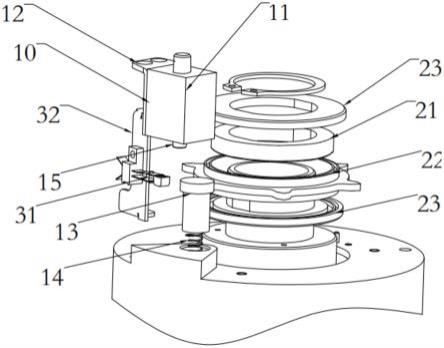
21.图2所示为本实用新型机器人关节制动装置的结构示意图;
22.图3为本实用新型机器人关节制动装置的立体分解图;
23.图4为本实用新型机器人关节制动装置主要部件的剖视图;
24.图5为本实用新型机器人关节制动装置制动状态下叶片开关、插销与制动盘位置关系示意图;
25.图6为本实用新型机器人关节制动装置松闸状态下叶片开关、插销与制动盘位置关系示意图;
26.图7为本实用新型第二实施例的制动盘的立体图。
27.图中:300、机器人关节;200、机器人关节本体;100、机器人关节制动装置; 1、插销组件;10、磁性推动件;11、电磁铁;12、支架;13、插销;14、弹性件;15、推杆;2、制动组件;21摩擦柱;22、制动盘;23、密封端盖;3、检测组件;31、叶片开关;32、底座;311、静叶片;312、动叶片;4、转轴;5、螺钉。
具体实施方式
28.下面,结合附图以及具体实施方式,对本实用新型做进一步描述,需要说明的是,在不相冲突的前提下,以下描述的各实施例之间或各技术特征之间可以任意组合形成新的实施例。
29.如图1所示,本实用新型公开了一种机器人关节300,其包括一机器人关节本体200和一机器人关节制动装置100。
30.如图2和图3所示,所述机器人关节制动装置100包括一转轴4,安装于一机器人关节本体200,且其相对所述机器人关节本体200转动;一插销组件1,位于所述转轴4一侧且安装于所述机器人关节本体200,所插销组件1包括一支架12和与所述支架12连接的一磁性推动件10,一弹性件14,组装于所述机器人关节本体200,一插销13,组装于所述弹性件14上,使其借用所述磁性推动件10的磁力和所述弹性件14的弹力于所述插销13的轴向的方向上位移;在本实施例中,弹簧一端抵接于所述机器人关节本体内,另一端抵接于所述插销13 的中空底部;一制动组件2,套设并固定于所述转轴4使所述制动组件2随着所述转轴4同步旋转,所述制动组件2包括一摩擦柱21,所述摩擦柱21套设并固定于所述转轴4,一制动盘22,所述制动盘22与所述摩擦柱21过盈连接,所述制动盘22和所述插销13于所述插销13位移方向上的投影存在重叠区域,由此通过所述插销13位移过程中干涉卡止所述制动盘22刹停所述制动组件2控制所述转轴4停止;一检测组件3,安装于所述机器人关节本体200,所述检测组件3和所述插销13于所述插销13的位移方向上的投影存在重叠区域,由此通过所述插销13位移过程中碰触或离开所述检测组件3,进而识别所述插销13 的位置。
31.如图3至图6所示,所述制动盘22包括中空结构,所述摩擦柱21位于制动盘22中空结构内部,且两者为过盈配合。摩擦面为圆柱面,摩擦面线速度相同,从而不会出现磨损不均匀的情况,摩擦产生的制动力矩稳定可靠。另外,在相同径向尺寸下,摩擦柱21的摩擦半径要大于圆环状摩擦片。因此将摩擦元件设计为圆柱结构有利于减小摩擦元件的径向尺寸,可以有效减小摩擦副的转动惯量。
32.所述摩擦柱21套设于转轴4上并与之固定,所述密封端盖23有两个并分别抵接于摩擦柱21的两端,并覆盖所述制动盘22的两侧。所述密封端盖23制动盘22间设有有交错面,形成迷宫密封结构,可将制动盘22与摩擦柱21摩擦制动过程中产生的粉尘密封到密封端盖
23内部,从而避免编码器与驱动器的污染。
33.所述制动盘22的外缘设有卡齿,形成外凸部,且外凸部和所述插销13于所述插销13位移方向上的投影存在重叠区域,所述卡齿的内凹部和所述插销13 于所述插销13位移方向上的投影不重叠。所述磁性推动件10包括一电磁铁11 固定于所述支架12,一推杆15,活动连接于所述电磁铁11,所述推杆15和所述制动盘22于所述插销13位移方向上的投影不重叠。当电磁铁11通电时,推杆15受到推力向外推出并推动插销13到达第一工作位置。所述第一工作位置位于制动盘22的所述卡齿下方,当插销13处于第一工作位置时,所述制动盘 22的所述卡齿运动不会受到阻碍,所述制动盘22随转轴4一起转动。这种所述制动盘22随所述转轴4一起转动的工作状态即为松闸状态。当电磁铁11断电时,所述推杆15不受力,处于自然状态,此时所述弹性件14将推动所述插销 13,所述插销13将从包括所述卡齿的所述制动盘22内凹部弹出到达第二工作位置。当所述插销13处于第二工作位置时,包括所述卡齿的所述制动盘22外凸部将受到所述插销13阻碍无法继续转动,所述制动盘22停止转动,此即为制动状态。停止转动的所述制动盘22与固定在所述转轴4上的所述摩擦柱21 摩擦从而使所述转轴4停下来,此即为制动过程。
34.所述检测组件3包括一底座32,安装于所述机器人关节本体200,以及安装于所述底座32的一检测组件31,所述检测组件31包括一动叶片312和一静叶片311,自然状态下,静叶片311上的触点与动叶片312上的触点紧密结合,当给动叶片312推力,则静叶片311与动叶片312上的触点分离。当插销13处于第一工作位置时,插销13与检测组件31无接触,静叶片311与动叶片312 处于结合状态。插销13向上弹起的过程中会接触到动叶片312并将动叶片312 向上推动,当插销13处于第二工作位置时,静叶片311与动叶片312处于分离状态。检测出检测组件31静叶片311与动叶片312的状态即可确认插销13所处位置,从而判断出所述一种带状态检测的插销13式摩擦制动装置的工作状态是松闸还是制动。进一步,所述静叶片311和动叶片312为相对设置的两块弹片,所述动叶片312的末端设有一接触部,所述接触部的厚度大于所述动叶片 312的厚度,便于所述插销13推动所述动叶片312弹性变形离开所述静叶片311。
35.本实用新型的另外一种实施例为所述制动盘22为圆环状,其包括一开口,所述开口两端通过两个螺钉5固定连接,通过调整所述螺钉5的松紧程度来控制所述制动盘22的内孔径,进而通过调整制动盘22与摩擦柱21间的过盈量大小达到调节制动力矩大小的效果。
36.本实用新型机器人关节制动装置100及机器人关节300的有益效果为:
37.1、制动盘22与摩擦柱21采用周向摩擦的方式,不存在摩损不均匀的情况,制动力矩稳定可靠。
38.2、使用检测组件31检测插销13位置状态从而判断制动装置是处于松闸工作状态还是制动工作状态,可以避免制动失灵导致安全事故;同时,若电磁铁 11意外失电,关节模组可以及时停止工作,防止摩擦副意外磨损甚至损坏。
39.3、密封端盖23与制动盘22交错面设计形成迷宫密封结构,对摩擦制动产生的粉尘进行密封。避免粉尘对编码器和驱动器造成污染,从而避免编码器精度下降或者驱动器短路风险。
40.上述实施方式仅为本实用新型的优选实施方式,不能以此来限定本实用新型保护的范围,本领域的技术人员在本实用新型的基础上所做的任何非实质性的变化及替换均属
于本实用新型所要求保护的范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。