1.本公开内容一般涉及在隔绝的环境之中于腔室之间传输基板的机器人和基板传送系统的领域。基板可使用在传输封闭件之中的磁悬浮平台来传输。亦公开在传送腔室中使用该磁悬浮平台的方法。
背景技术:
2.在数个处理腔室之中使用大量处理步骤于半导体基板上生产半导体装置。各个处理腔室用来完成一个或多个各种步骤(例如,蚀刻、抛光、沉积)以形成半导体装置。基板传送系统用来在处理腔室的各个处理腔室之间移动基板。处理腔室和基板传送系统可分别保持在真空下。用于基板传送系统的一种布置是线性布置,在该线性布置中处理腔室沿着线性(矩形)腔室的各侧成排布置。
3.使用线性布置的基板传送系统通常包括传送带,传送带具有矩形顶部表面并且处理腔室在传送带的一侧或相对侧上。传送带可连接至装载锁定件,以便当基板从基板传送系统供应和移除时,在基板传送系统之中维持真空环境。一个或多个机械臂可定位接近处理腔室,以在传送带和处理腔室之间传送基板。传统的基板载具通常受限于仅以一个方向移动基板。因此,用于在处理腔室之间移动基板和进和/或出装载锁定件的运动选择可能受限。此外,传统基板载具可具有大的足迹和内部空间,以容纳在第一方向中移动的一个轨道,和在相对的第二方向中移动的水平偏移的第二轨道。
技术实现要素:
4.根据各种实施方式,本文公开一种用于电子装置处理系统的传送腔室,包含第一磁悬浮轨道,设置于传送腔室之中的第一高度处,其中第一磁悬浮轨道具有面向上定向,构造成在第一磁悬浮轨道上方产生第一磁场;第二磁悬浮轨道,设置于传送腔室之中的第二高度处,其中第二磁悬浮轨道具有面向下定向,构造成在第一磁悬浮轨道下方产生第二磁场;多个基板载具,构造成沿着第一磁悬浮轨道和第二磁悬浮轨道移动,其中多个基板载具的各个基板载具在基板载具的底部上包含第一磁体,以与第一磁场相互作用,且在基板载具的顶部上包含第二磁体,以与第二磁场相互作用;和至少一个升降杆组件,构造成在第一磁悬浮轨道和第二磁悬浮轨道之间于垂直方向中移动多个基板载具。
5.根据各种实施方式,本文进一步公开一种电子装置处理系统,包含传送腔室,包含第一磁悬浮轨道,设置于传送腔室之中的第一高度处,其中第一磁悬浮轨道具有面向上定向,构造成在第一磁悬浮轨道上方产生第一磁场;第二磁悬浮轨道,设置于传送腔室之中的第二高度处,其中第二磁悬浮轨道具有面向下定向,构造成在第一磁悬浮轨道下方产生第二磁场;多个基板载具,构造成沿着第一磁悬浮轨道和第二磁悬浮轨道移动,其中多个基板载具的各个基板载具在基板载具的底部上包含第一磁体,以与第一磁场相互作用,且在基板载具的顶部上包含第二磁体,以与第二磁场相互作用;和至少一个升降杆组件,构造成在第一磁悬浮轨道和第二磁悬浮轨道之间于垂直方向中移动多个基板载具;多个处理腔室,
沿着传送腔室的长度连接至传送腔室;和第一装载锁定件,连接至传送腔室的一端。
6.在又进一步各种实施方式中,本文公开一种在传送腔室中移动一个或多个基板的方法,包含通过与第一磁悬浮轨道接合的第一基板载具从装载锁定件取回第一基板,第一磁悬浮轨道定位靠近传送腔室的底部,其中第一磁悬浮轨道具有面向上定向,构造成在第一磁悬浮轨道上方产生第一磁场;通过第一磁悬浮轨道产生第一磁场,以沿着第一磁悬浮轨道在第一方向中移动具有第一基板的第一基板载具;用第一升降杆组件举升具有第一基板的第一基板载具至第二磁悬浮轨道,第二磁悬浮轨道定位靠近传送腔室的顶部表面,其中第二磁悬浮轨道具有面向下定向,构造成在第一磁悬浮轨道下方产生第二磁场;侦测第一基板载具靠近第二磁悬浮轨道;和产生第二磁场以在第二磁悬浮轨道下方悬吊第一基板载具,且沿着第二磁悬浮轨道在第二相对方向中移动具有第一基板的第一基板载具。
附图说明
7.本公开内容通过范例的方式,且并非通过限制的方式,图示于附图的视图中,其中类似的附图标记代表类似的元件。
8.图1a根据各种实施方式,描绘基板传送系统的顶视图。
9.图1b根据各种实施方式,描绘基板传送系统的侧视图。
10.图1c根据各种实施方式,描绘基板载具。
11.图2根据各种实施方式,图示通过传送腔室移动晶片的方法。
12.图3根据各种实施方式,图示通过传送腔室移动晶片的方法。
13.图4根据各种实施方式,图示通过传送腔室移动晶片的方法。
具体实施方式
14.此说明书全篇参照例如“一个实施方式”、“某些实施方式”、“一个或多个实施方式”或“一实施方式”代表与实施方式有关描述的特定特征、结构、材料或特性包括在本发明的至少一个实施方式中。因此,此说明书全篇例如“在一个或多个实施方式中”、“在某些实施方式中”、“在一个实施方式中”或“在一实施方式中”的术语的出现并非必须代表本发明的相同实施方式。再者,特定特征、结构、材料或特性可以任何适合的方式结合于一个或多个实施方式中。
15.如本文所使用,“一”、“一者”和“该”的单一形式包括复数参照,除非上下文清楚另外指示。因此,例如参考“一升降杆”包括单一升降杆以及多于一个升降杆。
16.如本文所使用,与测量的数量有关的术语“约”代表在得到测量和行使与测量目标相称的关注水平和测量装备的精确度下,由本领域技术人员预期的测量的数量中的正常变化。在某些实施方式中,“约”一词包括
±
10%的所述数目,使得“约10”将包括从9至11。
17.与测量的数量有关的术语“至少约”,代表在测量的数量中的正常变化,如在得到测量和行使与测量目标相称的关注水平和测量装备的精确度和任何更高的数量下,由本领域技术人员所预期。在某些实施方式中,术语“至少约”包括所述数目减去10%和更高的任何数量,使得“至少约10”将包括9和任何大于9的数量。该术语亦可表示为“约10或更多”。类似地,术语“小于约”一词通常包括所述数目加上10%和更低的任何数量,使得“小于约10”将包括11和任何小于11的数量。此术语亦可表示为“约10或更少”。
18.除非另外指示,所有份数和百分比是重量。若无另外指示,重量百分比(wt.%)基于不含任何挥发物的整体成分,亦即,基于干的固体内容物。
19.根据多个实施方式,本文公开为在半导体装置制造系统中使用具有双向磁悬浮平台的传送腔室。在多个实施方式中,双向磁悬浮平台具有线性构造,具有窄的(例如,不比晶圆的直径宽太多)内部宽度,而可在任一方向中移动晶片不会破坏真空,且可提供对连接至双向磁悬浮平台的处理腔室的随意进出。在多个实施方式中,系统包括两个磁悬浮平台,一个在传送腔室的顶部处,且一个在传送腔室的底部处,是在面向布置中。
20.双向真空磁悬浮平台不仅具有窄的、小的足迹(即,约是晶片的直径的宽度),但亦具有弹性晶片流动,消除在晶片传输期间破坏真空的需求,具有小的真空空间且相对易于服务。根据多个实施方式,本文所述的双向磁悬浮系统是单一空间平台,可选地不具有装载锁定件。系统在向前或返回磁悬浮轨道任一者上能够随意进出腔室。
21.在多个实施方式中,传送系统(亦称为传送腔室)具有两个磁悬浮轨道。顶部轨道设置于传送腔室的顶部,且颠倒定向而提供动力(例如,线性电机的定子)的表面面向下至传送腔室的内部空间中。底部轨道设置于传送腔室的底部,且正面向上定向而提供动力(例如,线性电机的定子)的表面面向上至传送腔室的内部空间中。顶部轨道和底部轨道可分别是或包括线性电机的定子。基板载具具有两组磁体(或两个线性电机的动子),一个在另一个顶部,以此方式布置使磁体不会短路彼此的磁场。一个动子(例如,一组磁体)可设置于各个基板载具的顶部上,且一个动子(例如,一组磁体)可设置于各个基板载具的底部上。此布置使得基板载具能够通过下部线性电机移动(例如,且骑乘(ride)下部轨道)以及通过上部线性电机移动(例如,且骑乘上部轨道)。轨道之间的平移可通过使用风箱从大气隔绝的一连串升降杆组件作用。各个升降杆组件具有可从底部轨道至顶部轨道举升基板载具的一组升降杆(而可包括附接至基板载具的晶片,例如在基板载具的终端受动器上的晶片)和/或从顶部轨道降低基板载具至底部轨道。当具有晶片附接至基板载具的基板载具到达对顶部磁悬浮轨道的某种靠近(例如,通过轨道感测系统感测)时,顶部轨道可靠近基板载具启动磁场,将基板载具紧固至顶部轨道。底部轨道可构造成在第一方向中移动基板载具,且顶部轨道可构造成在相反第二方向中移动基板载具。因此,基板载具和支撑的基板可在两个方向中自由移动至目的地,而不会造成基板载具之间的碰撞,且具有最小传送腔室的内部空间和最小传送腔室的足迹。
22.双向磁悬浮系统可包括多个升降杆组件,使得基板载具可在数个地点处换乘来往顶部轨道。此举使得例如晶片能够在一个方向中从装载锁定件通过底部轨道至腔室#2,在腔室#2中处理,在第一方向中通过底部轨道传送至腔室#4,在腔室#4中处理,在第二方向中通过顶部轨道传送至腔室#3,在腔室#3中处理,且在第二方向中通过顶部轨道移动回到装载锁定件。
23.根据多个实施方式,本文所述是用于电子装置处理系统的传送腔室,包含在传送腔室之中设置于第一高度处的第一磁悬浮轨道,其中第一磁悬浮轨道具有面向上定向,构造成在第一磁悬浮轨道上方产生第一磁场;在传送腔室之中设置于第二高度处的第二磁悬浮轨道,其中第二磁悬浮轨道具有面向下定向,构造成在第二磁悬浮轨道下方产生第二磁场;多个基板载具,构造成沿着第一磁悬浮轨道和第二磁悬浮轨道移动,其中多个基板载具的各个基板载具包含在基板载具的底部上的第一磁体,以与第一磁场相互作用,和在基板
载具的顶部上的第二磁体,以与第二磁场相互作用;和至少一个升降杆组件,构造成在第一磁悬浮轨道和第二磁悬浮轨道之间以垂直方向移动多个基板载具。根据多个实施方式,在基板载具的底部上的第一磁体可以是磁体系统,例如包含以哈尔巴赫阵列布置的多个磁体,使多个磁体不会影响其他磁体系统的操作。第一磁体(系统)可在正面向上的定向中。在基板载具的顶部上的第二磁体可以是第二磁体系统,例如亦包含以哈尔巴赫阵列布置的多个磁体,使多个磁体不会影响其他磁体系统的操作。第二磁体(系统)可在颠倒构造的定向中。
24.将第一磁悬浮轨道和第二磁悬浮轨道布置成面向构造减少传送腔室的足迹以及抽取至真空的传送腔室的内部空间。此外,根据多个实施方式,所有的传送腔室的电子零件可定位在传送腔室的大气侧。根据多个实施方式,传送腔室可无须包含升降机。取而代之地,传送腔室可包含多个升降杆组件,而可在第一磁悬浮轨道和第二磁悬浮轨道之间于沿着传送腔室的各点处移动基板载具(和支撑的基板,例如晶片)。在多个进一步实施方式中,基板载具包含两组磁体,而允许基板载具沿着第一轨道和第二轨道行进而不会翻倒。
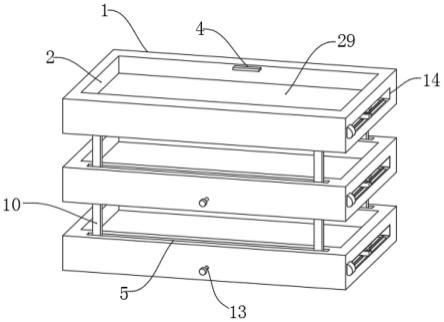
25.参照图1a,用于电子装置处理系统100的传送腔室102可具有至少一个口103,构造成准许对至少一个处理腔室104的进出。在多个实施方式中,传送腔室102可具有多个口103、103a-103k,其中各个口构造成准许对多个处理腔室104、104a-104k的一个处理腔室的进出。各个口可包括狭缝阀,经尺寸设计以接收保持基板(例如,晶片)的终端受动器。在一个实施方式中,所有的口103、103a-k和/或狭缝阀是共面且分享共同的高度。或者,不同的口和/或狭缝阀可定位于不同的高度和/或平面处。此外,在一个实施方式中,所有的口103、103a-k和/或狭缝阀具有共同的开口间距(开口的垂直尺寸)。共同的开口间距可以是可接收终端受动器和定位于特定高度处的基板的单一高度间距,或可接收终端受动器和定位于多重不同高度处的基板的多重高度间距(例如,附接至底部轨道的基板载具的终端受动器和基板以及附接至顶部轨道的基板载具的终端受动器和基板)。或者,不同口103、103a-k可具有不同的开口间距。
26.根据多个实施方式,传送腔室可具有长度和宽度,其中长度的第一尺寸大于宽度的第二尺寸数个数量级。多个口103、103a-103k可沿着传送腔室102的长度设置。在多个实施方式中,口103、103a-k可定向大约正交于传送腔室102的长度。在多个实施方式中,长度是约5ft至约20ft,或约6ft,或约8ft,或约10ft,或约12ft,或约14ft,或约16ft,或约18ft,或约20ft等等。在多个实施方式中,传送腔室102可进一步包括额外口106,构造成准许对装载锁定件107的进出(或多重额外口,各个构造成准许对一个或多个装载锁定件的进出)。额外口106可沿着传送腔室102的宽度在传送腔室102的第一端处设置。装载锁定件107可连接至包含一个或多个前开式标准舱(foups)111的工厂界面109。工厂界面含有机械臂(未显示),而从foups 111提取晶片且将晶片放置于用于基板载具110、110a-c的装载锁定件107,以将晶片从装载锁定件107取回。
27.在一些实施方式中,第一口可大约正交于口103、103a-k。在多个实施方式中,传送腔室100的宽度大约等于装载锁定件107的宽度或基板108、108a-108c的宽度。在多个实施方式中,传送腔室100的宽度比装载锁定件107和/或基板108、108a-108c宽约2mm至约20mm。
28.传送腔室系统100包括至少一个基板载具110、110a-110c,构造成在至少一个处理腔室104、104a-104k和传送腔室102之间传送基板108、108a-108c。根据多个实施方式,传送
腔室102可含有数个基板载具110、110a-110c,例如2、3、4、5、6、7、8、9或10个,或约2个至约10个基板载具。
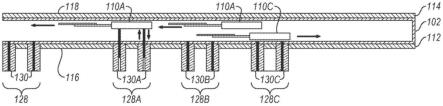
29.各个基板载具110、110a-110c构造成使用磁悬浮传送带系统(例如,一个或多个线性电机)移动。举例而言,如图1b中所显示,各个基板载具110、110a-110c可沿着至少一个磁悬浮轨道112、114移动。根据多个实施方式,传送腔室102可包括两个磁悬浮轨道112、114,第一磁悬浮轨道112(例如,线性电机的第一定子)在传送腔室102的底部内部表面116上,且第二磁悬浮轨道114(例如,另一线性电机的第二定子)在传送腔室102的相对、顶部内部表面118上。第一磁悬浮轨道112可构造成在向前方向(离开装载锁定件)中移动基板载具110、110a-c,而第二磁悬浮轨道114可构造成在相对、反向方向中移动基板载具110、110a-c。在多个实施方式中(未显示),第一磁悬浮轨道112可在底部内部表面116上,而第二磁悬浮轨道114可在顶部内部表面118上。磁悬浮轨道112、114可在如图1b中所显示的面向布置中(例如,具有第一磁悬浮轨道112在面向上定向中且第二磁悬浮轨道114在面向下定向中)。在多个实施方式中,第一轨道112和第二轨道114可通过约40mm至约300mm的距离分隔开来,或约100mm至约250mm,或约150mm至约200mm。
30.根据多个实施方式,第一磁悬浮轨道112可构造成沿着传送腔室102的长度在第一方向中移动多个基板载具110、110a-110c的一个或多个基板载具。第二磁悬浮轨道114可构造成沿着传送腔室102的长度在第二方向中移动多个基板载具110、110a-110c的一个或多个基板载具,其中第二方向相对于第一方向。举例而言,第一磁悬浮轨道112可从装载锁定件106移动基板载具110、110a-110c至传送腔室102中且至处理腔室104、104a-104k中。相对应地,顶部磁悬浮轨道114可从处理腔室104、104a-104k移动基板载具110、110a-110c通过传送腔室102且至装载锁定件106。在多个实施方式中,传送腔室系统可包括至少一个位置传感器,用于监控基板载具110、110a-110c的位置。在一个实施方式中,第一磁悬浮轨道112和第二磁悬浮轨道114可包括功能性的位置传感器。
31.图1c根据多个实施方式,显示适合在传送腔室系统100中使用的基板载具110的实施方式。基板载具110可包括终端受动器120,用于接收、升降和保持例如晶片的基板108,和/或在终端受动器120上可放置基板。在半导体处理系统中使用的任何适合的终端受动器120可如本领域技术人员将理解而使用。根据多个实施方式,一个或多个基板载具110可以是如本领域中技术人员已知的机械臂。基板载具110可包括上部磁性部分124和下部磁性部分126。下部磁性部分126例如可以是第一线性电机的第一动子。上部磁性部分124例如可以是第二线性电机的第二动子。或者,上部磁性部分和下部磁性部分可以是构造成与基板载具110下方的第一定子和基板载具110上方的第二定子接合的单一动子的上半部和下半部。上部磁性部分124可包括一个或多个磁体(例如,永久磁体),且下部磁性部分126可包括一个或多个额外磁体。上部磁性部分和下部磁性部分可构造成使上部磁性部分和下部磁性部分的磁场不会彼此干扰。磁悬浮传送带系统包括一个或多个电磁体(未显示),用于控制基板载具和线性电机(未显示)的运动,用于移动基板载具110、110a-110c。
32.参照回图1a-图1b,根据多个实施方式,多个口103、103a-103k可以是或包括多个狭缝阀。多个狭缝阀的至少第一子集的第一传送平面对与第一磁悬浮轨道112接合的基板载具110c可进出。多个狭缝阀的第二子集的第二传送平面对与第二磁悬浮轨道114接合的基板载具110a、110b可进出。为了进一步强化产量且能够在处理腔室104、104a-104k或装载
锁定件107中大约同时调换基板,多个狭缝阀的至少一些狭缝阀具有第一晶片传送平面和在第一晶片传送平面上方的第二经传送平面。第一晶片传送平面对与第一磁悬浮轨道112接合的基板载具110c可进出。第二晶片传送平面对与第二磁悬浮轨道接合的基板载具110a、110b可进出。举例而言,与第一磁悬浮轨道112接合的第一基板载具110c可进入处理腔室104、104a-104k,与第二磁悬浮轨道114接合且将基板108、108a-108c保持于第二基板载具110a、110b上的第二基板载具110a、110b可定位于第一基板载具110c上方。一旦(或同时)第一基板在第一传送平面从处理腔室移除之后,第二基板可在第二传送平面中装载至相同的处理腔室中,完成第一基板(例如,刚结束处理)和第二基板(例如,需要处理)的调换。在多个进一步实施方式中,多个狭缝阀可具有共同传送平面,对与第一磁悬浮轨道112接合的基板载具110、110a-110c可进出,而且对与第二磁悬浮轨道114接合的基板载具110、110a-110c可进出。狭缝阀开口可根据传送平面的构造而尺寸设计。狭缝阀开口对单一传送平面可以是约1英寸至约20英寸,且当具有两个传送平面时是约2英寸至约20英寸。举例而言,若具有两个晶片传送平面,则狭缝阀开口可比若具有一个晶片传送平面时更大。
33.根据多个实施方式,系统可包括第一装载锁定件107和第二装载锁定件(未显示)。第一装载锁定件107可对与第一磁悬浮轨道接合的基板载具110、110c可进出。第二装载锁定件可堆叠在第一装载锁定件107上方,于传送腔室102的端处。第二装载锁定件可对与第二磁悬浮轨道接合的基板载具110a、110b可进出。在多个实施方式中,在接近第一装载锁定件107的端处的传送腔室102的第一高度可大于其余传送腔室102的第二高度。在多个进一步实施方式中,第一装载锁定件107和第二装载锁定件可以相对于传送腔室的长度的角度(例如,30或45度的角度)而布置在侧面并排的构造中。
34.根据多个实施方式,系统包括至少一个升降杆组件128、128a-128c,构造成接收基板108、108a-108c且在传送平面之间和/或在磁悬浮轨道112、114之间举升和/或降低基板。升降杆组件128、128a-128c可包括一个或多个升降杆,例如一对或三个(trio)升降杆130、130a-130c。升降杆130、130a-130c可构造成穿过传送腔室102的底部表面116,且可具有面向大气侧和面向真空侧。面向大气侧可在传送腔室102的底部表面的外侧。升降杆130、130a-130c可包覆在风箱中,以维持传送腔室中的真空环境。升降杆130、130a-130c可构造成在面向真空侧延伸至传送腔室102中。在多个实施方式中,至少一个升降杆组件128、128a-128c可构造成在垂直方向中移动定位于第一装载锁定件107的前方的基板载具110,以造成基板载具110到达其余传送腔室102(以上所讨论)的第二高度上方的传送平面。在操作期间,当升降杆130、130a-130c举升基板载具110、110a-110c至与顶部轨道118的某种靠近时,可靠近基板载具启动磁场。当升降杆130、130a-130c在顶部轨道118上与基板载具110、110a-110c接合时,可停用靠近基板载具110、110a-110c的磁场,以通过升降杆130、130a-130c移动基板至下部轨道112。
35.本文进一步说明根据各种实施方式的使用传送腔室系统的方法。参照图2,方法200可包括在框202处,移动第一基板通过传送腔室。移动202可包括在框204处,通过第一基板载具接收第一基板,其中第一基板载具与定位于传送腔室的底部表面的第一磁悬浮轨道相关联。在多个实施方式中,接收204可包括将基板载具的终端受动器移动至与传送腔室相关联的半导体处理腔室中,且在终端受动器上接收第一基板。
36.移动202进一步可包括可选地,于框206处,沿着第一磁悬浮轨道移动具有第一基
板的第一基板载具。额外或替代地,移动202进一步可包括可选地,于框208处,以第一升降杆组件举升具有第一基板的第一基板载具至定位于传送腔室的顶部表面上的第二磁悬浮轨道,其中第二磁悬浮轨道在对第一磁悬浮轨道为面向的布置中。如上所述,根据本文各种实施方式的传送腔室可与至少一个半导体处理腔室连接,例如在线性布置中。
37.根据多个实施方式,方法200进一步包括可选地,于框210处,移动第二基板通过传送腔室。移动210进一步可包括可选地,于框212处,通过第二基板载具接收第二基板,其中第二基板载具与第一磁悬浮轨道相关联。移动210进一步可包括沿着第一磁悬浮轨道移动具有第二基板的第二基板载具。额外或替代地,移动210进一步可包括在框214处,以第二升降杆组件举升具有第二基板的第二基板载具至第二磁悬浮轨道。
38.根据多个实施方式,接收212可包括通过第一基板载具从半导体处理腔室移除基板。根据多个实施方式,方法200可进一步包括以第一升降杆组件举升208具有第一基板的第一基板载具,且沿着第一磁悬浮轨道移动具有第二基板的第二基板载具,其中第二基板载具将第二基板定位于半导体处理腔室中。在多个实施方式中,第一基板载具可沿着第一轨道(例如,底部轨道)在第一方向中移动,且第二基板载具可沿着第二轨道(例如,顶部轨道)在第二方向中移动。第一基板载具和第二基板载具能够彼此通过而不会碰撞。
39.根据各种实施方式,再次参照图1a和图1b,于操作期间,定位于装载锁定件107中的基板(例如,晶片)可从装载锁定件通过第一基板载具110在第一传送平面中移动。于上面具有基板的第一基板载具110可接着沿着第一轨道112在第一方向中移动至第一处理腔室104f。若第一基板载具110已经在传送平面且第一处理腔室104f准备好接收基板,则第一基板载具110将基板定位于第一处理腔室104f中。若于上面具有基板的第一基板载具并非在传送平面,则第一基板载具可定位于第一升降杆组件128上方靠近第一处理腔室104f。第一升降杆组件128可举升于上面具有基板的基板载具110至传送平面中,其中当第一处理腔室104f准备好接收基板时,第一基板载具将基板放置于第一处理腔室104f中。第一基板载具110现在是空的以从装载锁定件107或从另一个处理腔室104、104a-104e、104g-104k任一个腔室收集另一个基板。
40.在多个实施方式中,第一基板载具110可通过第一升降杆组件128举升至第二轨道114,且例如在第二方向中返回至装载锁定件107,以收集另一个基板。或者,基板载具可通过第一升降杆组件128降低至第一轨道112,除非第一基板载具110已经与第一轨道112接合,其中第一基板载具110可沿着第一轨道112移动至另一个处理腔室104a-104e、104g-104k。在多个实施方式中,基板载具110可在第一处理腔室104f处等待,直到在基板上完成处理步骤。在多个实施方式中,基板可接着使用第一基板载具110或者使用第二基板载具110a-110c传送至第二处理腔室104b。在处理腔室和装载锁定件之间、轨道之间且进出传送平面移动基板可如所需的重复,以提供基板处理连续且有效率的操作。一旦基板已在相对应处理腔室中通过所有必须的处理步骤处理之后,于上面具有基板的基板载具可举升至第二轨道114,且沿着第二方向返回靠近装载锁定件107。
41.在多个实施方式中,装载锁定件传送平面可在第二轨道114下方,使得于上面具有基板的基板载具可通过升降杆组件128降低至传送平面,而在某些实施方式中,可与第一轨道112齐平。根据某些实施方式,传送腔室102可连接至单一装载锁定件107或多个装载锁定件(未显示)。举例而言,传送腔室可连接至在垂直布置中的两个装载锁定件。在此构造中,
与顶部轨道接合的基板载具可装载至上部装载锁定件中。在某些实施方式中,装载锁定件可在侧面并排的布置中,且基板载具可举升或降低以与传送平面对齐。
42.本公开内容进一步涉及方法300,如图3中所显示,包含于框302处,根据本文所述的多个实施方式移动一个或多个基板通过传送腔室。移动302可包括在框304处,通过第一基板载具接收第一基板,其中第一基板载具与根据本文的多个实施方式的第一磁悬浮轨道相关联。
43.在框306处,方法300可包括通过第一升降杆组件接收具有第一基板的第一基板载具,且移动具有第一基板的第一基板载具至第二基板传送平面。方法300进一步可包括可选地于框308处,在第一基板传送平面中于第二基板载具上移动第二基板。磁场可在底部轨道中启动,以将第二基板载具紧固至顶部轨道。在框310处,方法300进一步可包括可选地在第一基板传送平面中于第二基板载具上移动第二基板。
44.根据多个实施方式,本文的方法可包括侦测基板载具的各个基板载具的位置,且将基板载具沿着且在第一磁悬浮轨道和第二磁悬浮轨道的各个磁悬浮轨道之间传输。随着基板载具沿着磁悬浮轨道移动,升降杆组件可在轨道之间举升和降低载具。此构造能够在处理腔室之间和处理腔室与至少一个装载锁定件之间弹性移动基板。此弹性耦接而具有传送腔室相对小的足迹在电子装置处理系统中增加晶片产量。
45.本公开内容进一步涉及方法400,如图4中所显示,用于在传送腔室中移动一个或多个基板,包含在框402中,通过与第一磁悬浮轨道接合的第一基板载具,从装载锁定件取回第一基板,第一磁悬浮轨道定位靠近传送腔室的底部表面,其中第一磁悬浮轨道具有面向上定向,构造成在第一磁悬浮轨道上方产生第一磁场。在框404处,方法进一步包括通过第一磁悬浮轨道产生第一磁场,以沿着第一磁悬浮轨道在第一方向中移动具有第一基板的第一基板载具。在框406处,方法进一步包括以第一升降杆组件举升具有第一基板的第一基板载具至定位靠近传送腔室的顶部表面的第二磁悬浮轨道,其中第二磁悬浮轨道具有面向下定向,构造成在第一磁悬浮轨道下方产生第二磁场。根据多个实施方式,方法进一步包括在框408处,侦测第一基板载具靠近第二磁悬浮轨道。在多个实施方式中,方法进一步包括产生第二磁场,以在第二磁悬浮轨道下方悬吊第一基板载具,且沿着第二磁悬浮轨道在第二方向中移动具有第一基板的第一基板载具。
46.以上说明提及数个特定细节,例如特定系统、部件、方法等等的范例,以便提供本发明数个实施方式的良好理解。然而,对本领域技术人员而言本发明的至少某些实施方式可无须这些特定细节而是显而易见的。在其他多个实例中,已知部件或方法并未详细说明或呈现于单纯框图格式中,以便避免非必要地模糊本发明。因此,提及的特定细节仅为范例。具体实例可从这些范例细节变化,且仍考虑为在本发明的范围之中。
47.尽管以特定顺序显示且说明本文的方法操作,各个方法的操作的顺序可改变,使得某些操作可以相反顺序实行,或使得某些操作可至少部分与其他操作同时实行。在另一个实施方式中,独特操作的指令或子操作可以是断续和/或交替的方式。
48.应理解以上说明书意图是图示且非限制。许多其他实施方式对本领域技术人员在阅读且理解以上说明之后将是显而易见的。本发明的范围因此应参考随附权利要求与这些权利要求的等效的全部范围一起而决定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。