1.本发明涉及晶圆清洗技术领域,尤其涉及一种半导体晶圆清洗机及清洗方法。
背景技术:
2.在现有的晶圆槽式清洗工艺中,都是由机械手将装有晶圆的花篮夹取后放置到清洗槽内,机械手复位再灌入清洗液实现清洗。而后待晶圆清洗完成,再开启阀门,等待清洗液的液位下降到标准液位之后,再控制机械手横向伸入,待横向伸入到位后,控制机械手下降、夹取,最后再将清洗完成的晶圆花篮提升上来,完成一个晶圆花篮的清洗动作。
3.之所以要让清洗液导出后再用机械手夹取,是因为晶圆清洗液的要求很严格,一旦机械手伸入清洗液后,势必增加了清洗液与机械手接触所产生化学反应的概率,从而降低了清洗液的重复利用次数,所以需要尽量避免除晶圆花篮以及清洗槽之外的部件与清洗液接触的问题发生。而在清洗液进出清洗槽时,是需要一定时间的,这就增加了整个清洗工艺的时间,积少成多,这清洗的时间累加后就会造成整个晶圆清洗的时间增加,直接影响清洗效率,而且这种清洗效率是随着晶圆清洗的次数增加而呈降低趋势的。
技术实现要素:
4.基于现有的晶圆清洗机清洗工艺控制不够紧凑而造成了清洗效率低的技术问题,本发明提出了一种半导体晶圆清洗机及清洗方法。
5.本发明提出的一种半导体晶圆清洗机,包括拿取花篮的机械手,还包括内底壁装有弯头排液管的外槽。
6.所述外槽的内部中心处竖直方向上安装有用于清洗晶圆的晶圆清洗槽,所述机械手将装有晶圆的花篮沿竖直方向上放置到所述晶圆清洗槽内实现清洗的动作,所述晶圆清洗槽的下表面设置有控制所述晶圆清洗槽是否进行泄液动作的电控阀机构。
7.优选地,所述外槽底部的中心线处向内呈圆台凹陷形状,所述电控阀机构竖直安装在所述外槽的圆台台阶上。
8.优选地,所述电控阀机构由微型液压缸、固定在所述微型液压缸活塞杆顶部的阀板以及开设在所述晶圆清洗槽内底壁处的泄液孔组成。
9.所述阀板的上表面圆周方向上设置有与所述泄液孔边沿圆周方向上贴合的密封o型圈,所述微型液压缸带动所述阀板上下升降后实现对所述泄液孔底部的开闭动作。
10.优选地,所述晶圆清洗槽的内侧底壁设有延伸至其两侧顶部的喷水管。
11.所述晶圆清洗槽的内底壁竖直方向上设有延伸至所述外槽底部的举升机构,所述举升机构包括沿所述晶圆清洗槽内侧壁滑动设置的托架,所述托架的两端表面为网格形状,所述花篮通过所述机械手运送至所述托架的上表面后松开,使得所述花篮活动卡合在所述托架的上表面处,以防止所述花篮在所述托架的上表面发生滑动位移。
12.所述举升机构还包括固定安装在所述外槽中心处的举升气缸,所述举升气缸的活塞杆贯穿并延伸至所述晶圆清洗槽的内部后与所述托架的下表面中心处固定连接。
13.所述晶圆清洗槽的两端内侧顶壁处还设有用于清洗液回流循环的回流管。
14.优选地,所述喷水管的顶部沿所述晶圆清洗槽的长度方向上阵列设置有对准所述花篮的喷头,所述喷水管的进液端贯穿并延伸至所述外槽的外部与储液罐连通实现进液动作。
15.优选地,所述晶圆清洗槽的四角处均设有用于竖直导向的支撑管,所述晶圆清洗槽的拐角处竖直方向上设有沿所述支撑管轴线方向上固定安装的阻尼器,所述阻尼器顶部的伸缩杆贯穿所述晶圆清洗槽后与所述托架的下表面四角处接触实现阻尼动作,所述阻尼器的伸缩杆外表面套接有用于防护的弹性防护套。
16.所述举升气缸的活塞杆外表面套接有用于密封的弹性伸缩套。
17.优选地,所述举升气缸通过所述托架向上顶起所述花篮至清洗液液位的上方,同时控制所述机械手前来吊取所述花篮。
18.优选地,所述机械手吊取所述花篮的同时,控制所述微型液压缸带动所述阀板下降脱离所述泄液孔实现泄液的动作,最后实现所述晶圆清洗槽内部的清洗液从所述弯头排液管内排出的动作。
19.一种半导体晶圆清洗机的清洗方法,包括以下步骤:s1、初始状态设定。
20.s2、启动清洗机工作,实现对所述花篮内晶圆的清洗动作。
21.s3、达到晶圆设定清洗时间后,进行停机、举升以及排液的动作。
22.s4、重复上述清洗步骤。
23.优选地,所述s1中还包括s11、关闭所述电控阀机构。
24.s12、所述举升气缸预先将所述托架举升至预设高度。
25.s13、通过所述喷水管将新的清洗液导入至所述晶圆清洗槽内。
26.所述s2中还包括s21、控制所述机械手将待清洗的花篮输送至所述托架上,再由举升气缸下降带动所述花篮放置到所述晶圆清洗槽内实现清洗的动作,同时所述阻尼器向上撑着所述托架的四角处对所述托架进行阻尼缓冲。
27.s22、清洗液从所述喷水管继续添加,待到达所述回流管出液端口的高度时,清洗液从所述回流管回流实现清洗液循环流动的动作。
28.所述s3还包括s31、控制所述举升机构将所述花篮进行举升操作:控制所述举升气缸升起,同时所述阻尼器向上撑着所述托架的四角处,所述举升气缸通过所述托架将所述花篮举升到设定高度,使得所述花篮的顶部高于清洗液的液位,直至所述机械手的最低处不触碰到清洗液为止,最后由所述机械手取走所述花篮。
29.s32、控制所述微型液压缸向下启动,带动所述阀板脱离所述泄液孔,使得使用后的清洗液从所述泄液孔内泄流,之后从所述弯头排液管内排出,直至清洗液全部泄完为止,最后待清洗液泄完,控制所述微型液压缸向上启动,带动所述阀板重新关闭所述泄液孔。
30.本发明中的有益效果为:1、通过设置举升机构,能够使得清洗完的花篮被顶起,进而脱离液位,方便机械手拿取,避免现有技术中机械手需要等到清洗液释放干净后才能拿取到花篮的问题,节省了等待的时间,提高了清洗效率。
31.2、通过设置电控阀机构,能够实现快速控制清洗液的导出过程,与举升机构共同
形成双向背向升降的动作,一方面打开电控阀机构时,液位快速下降,另一方面举升机构将花篮向上提升,能够极大方便机械手将花篮拿放,即,机械手随来随实现拿取动作,无需等待,彻底不受现有技术中等待液位下降或流干净才能拿取花篮动作的限制。
32.3、通过设置晶圆清洗槽的顶升方法,能够清楚的展示整个顶升步骤,减少现有技术中必须等到清洗液释放完才能进行下一步动作的清洗流程,进一步提高效率。
附图说明
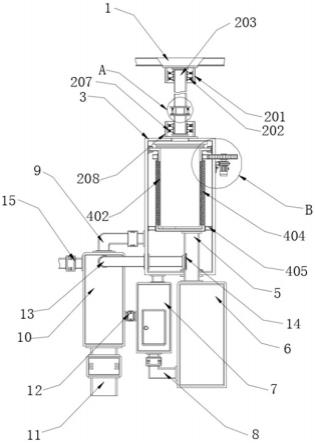
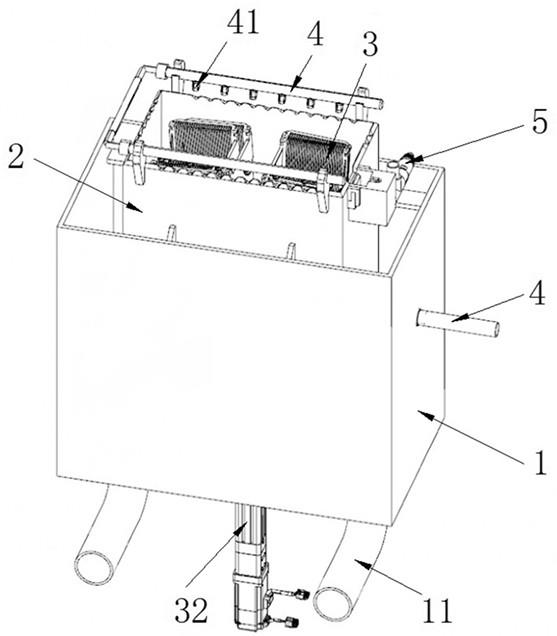
33.图1为本发明提出的一种半导体晶圆清洗机及清洗方法的示意图;图2为本发明提出的一种半导体晶圆清洗机及清洗方法的立体半剖图;图3为本发明提出的一种半导体晶圆清洗机及清洗方法的仰视立体图;图4为本发明提出的一种半导体晶圆清洗机及清洗方法的阻尼器结构安装正视图。
34.图中:1、外槽;11、弯头排液管;2、晶圆清洗槽;21、微型液压缸;22、阀板;23、泄液孔;24、密封o型圈;3、花篮;31、托架;32、举升气缸;4、喷水管;41、喷头;5、回流管;6、支撑管;61、弹性伸缩套;62、弹性防护套;63、阻尼器。
具体实施方式
35.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
36.实施例一参照图1-图4,一种半导体晶圆清洗机,包括拿取花篮3的机械手(图中未画出),本技术中的机械手可采用授权公告号为cn 114405892b的一种适用于半导体晶圆槽式清洗机械手的清洗槽中的机械手。
37.为了充分利用晶圆清洗过程中的时间间隙,还包括内底壁装有弯头排液管11的外槽1,外槽1能够清洗后的清洗液进行集中快速的导出,可充分利用正在清洗的时间空隙,进行其他操作,尽最大可能的节省清洗液更换过程中所需要的时间,以此提高清洗效率。
38.为了不影响清洗液导出速度的基础上,还能减少清洗液接触过多的零部件,在外槽1的内部中心处竖直方向上安装有用于清洗晶圆的晶圆清洗槽2,将晶圆清洗槽2设置套在外槽1的内部,不仅能够方便集成安装其他结构,同时还能利用两者之间的间隙构成一个保温腔体,防止清洗液的温度散失过快。
39.为了能够实现对晶圆清洗槽2内底壁快速密封以及导流开关的控制,机械手将装有晶圆的花篮3沿竖直方向上放置到晶圆清洗槽2内实现清洗的动作,晶圆清洗槽2的下表面设置有控制晶圆清洗槽2是否进行泄液动作的电控阀机构。
40.进一步地,外槽1底部的中心线处向内呈圆台凹陷形状,电控阀机构竖直安装在外槽1的圆台台阶上,向内凹陷的圆台,一方面能够方便安装,另一方面减少清洗液积留在外槽1中心处的可能性,方便导流。
41.进一步地,电控阀机构由微型液压缸21、固定在微型液压缸21活塞杆顶部的阀板22以及开设在晶圆清洗槽2内底壁处的泄液孔23组成。其中微型液压缸21的整体外观上要进行密封处理,以防止清洗液进入到微型液压缸21内部去,而损坏液压缸以及污染到清洗
液,且密封所用的材料不能与清洗液发生化学反应。电控阀机构采用的零部件数量越少越有利于清洗液的纯净度,防止零部件过多而污染到清洗液,以此避免清洗效率的降低。
42.为了增加阀板22的密封性,在阀板22的上表面圆周方向上设置有与泄液孔23边沿圆周方向上贴合的密封o型圈24,不仅可以使用o型圈,同时还能使用任何能带有密封效果的密封圈,微型液压缸21带动阀板22上下升降后实现对泄液孔23底部的开闭动作,以降低清洗过程中可能发生泄漏的可能性,保证了清洗效率。
43.通过设置电控阀机构,能够实现快速控制清洗液的导出过程,与举升机构共同形成双向背向升降的动作,一方面打开电控阀机构时,液位快速下降,另一方面举升机构将花篮3向上提升,能够极大方便机械手将花篮3拿放,即,机械手随来随实现拿取动作,无需等待,彻底不受现有技术中等待液位下降或流干净才能拿取花篮3动作的限制。
44.改变以往清洗槽固定不动的现有技术,将清洗槽设置为内外两种槽体,外槽体采用上述实施例中的外槽1,内槽体采用可上下活动升降的晶圆清洗槽2,晶圆清洗槽2的内侧底壁设有延伸至其两侧顶部的喷水管4,喷水管4的顶部沿晶圆清洗槽2的长度方向上阵列设置有对准花篮3的喷头41,喷水管4的进液端贯穿并延伸至外槽1的外部与储液罐连通实现进液动作。以便于清洗液的整体流动性,保证清洗效果。
45.为了减少花篮3拿取时所等待清洗液流出的时间,在晶圆清洗槽2的内底壁竖直方向上设有延伸至外槽1底部的举升机构,举升机构包括沿晶圆清洗槽2内侧壁滑动设置的托架31,托架31的两端表面为网格形状,花篮3通过机械手运送至托架31的上表面后松开,使得花篮3活动卡合在托架31的上表面处,以防止花篮3在托架31的上表面发生滑动位移。
46.为了使得晶圆清洗槽2具有超高的顶升效果,举升机构还包括固定安装在外槽1中心处的举升气缸32,举升气缸32采用行程超过晶圆清洗槽2高度的型号,也可采用液压缸,根据具体晶圆重量来决定。举升气缸32的活塞杆贯穿并延伸至晶圆清洗槽2的内部后与托架31的下表面中心处固定连接。
47.晶圆清洗槽2的两端内侧顶壁处还设有用于清洗液回流循环的回流管5,与喷管4共同形成一个完整的用来循环清洗液的管回路。
48.为了避免泄漏以及保护各零部件,晶圆清洗槽2的拐角处竖直方向上设有沿支撑管6轴线方向上固定安装的阻尼器63,阻尼器63顶部的伸缩杆贯穿晶圆清洗槽2后与托架31的下表面四角处接触实现阻尼动作,阻尼器63的伸缩杆外表面套接有用于防护的弹性防护套62。晶圆清洗槽2的四角处的阻尼器63与四个支撑管6的顶部一一对应,之后阻尼器63上伸缩杆的顶部顶到托架31的四角处,形成弹性阻尼动作的同时再结合弹性防护套62构成一个弹性密封构件,以防止清洗液进入到阻尼器63的内部。
49.为了防止污染到举升气缸32顶部的活塞杆部位,举升气缸32的活塞杆外表面套接有用于密封的弹性伸缩套61,以防止清洗液与之发生化学反应的问题发生。
50.为了避免清洗液与机械手接触时所带来的污染问题,举升气缸32通过托架31向上顶起花篮3至清洗液液位的上方,同时控制机械手前来吊取花篮3,机械手的动作以及顶升的动作可同时进行,进一步减少每个动作所需要的时间。
51.进一步地,机械手吊取花篮3的同时,控制微型液压缸21带动阀板22下降脱离泄液孔23实现泄液的动作,最后实现晶圆清洗槽2内部的清洗液从弯头排液管11内排出的动作,多个泄液孔23能够加快泄液的动作,减少泄液时间,同时机械手提取花篮的动作能够同步
进行,充分利用泄液的时间来实现花篮3的拿取动作,提高了清洗效率。
52.通过设置举升机构,能够使得清洗完的花篮3被顶起,进而脱离液位,方便机械手拿取,避免现有技术中机械手需要等到清洗液释放干净后才能拿取到花篮3的问题,节省了等待的时间,提高了清洗效率。
53.实施例二参照图1-图4,一种半导体晶圆清洗机的清洗方法,包括以下步骤:s1、初始状态设定:还包括s11、关闭电控阀机构;s12、举升气缸32预先将托架31举升至预设高度;s13、通过喷水管4将新的清洗液导入至晶圆清洗槽2内。
54.s2、启动清洗机工作,实现对花篮3内晶圆的清洗动作;s2中还包括s21、控制机械手将待清洗的花篮3输送至托架31上,再由举升气缸32下降带动花篮3放置到晶圆清洗槽2内实现清洗的动作,同时阻尼器63向上撑着托架31的四角处对托架31进行阻尼缓冲;s22、清洗液从喷水管4继续添加,待到达回流管5出液端口的高度时,清洗液从回流管5回流实现清洗液循环流动的动作。
55.s3、达到晶圆设定清洗时间后,进行停机、举升以及排液的动作;s3还包括s31、控制举升机构将花篮3进行举升操作:控制举升气缸32升起,同时阻尼器63向上撑着托架31的四角处,举升气缸32通过托架31将花篮3举升到设定高度,使得花篮3的顶部高于清洗液的液位,直至机械手的最低处不触碰到清洗液为止,最后由机械手取走花篮3。
56.s32、控制微型液压缸21向下启动,带动阀板22脱离泄液孔23,使得使用后的清洗液从泄液孔23内泄流,之后从弯头排液管11内排出,直至清洗液全部泄完为止,最后待清洗液泄完,控制微型液压缸21向上启动,带动阀板22重新关闭泄液孔23。
57.s4、重复上述清洗步骤。
58.通过设置晶圆清洗槽2的举升方法,能够清楚的展示整个顶升步骤,减少现有技术中必须等到清洗液释放完才能进行下一步动作的清洗流程,进一步提高效率。
59.以上,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。