1.本实用新型涉及钣喷技术领域,具体是一种视觉钣喷机器人。
背景技术:
2.在汽车的后市场,喷漆是一项重要的工艺环节,在喷漆的过程中,漆面的均匀度是衡量喷漆质量高低的一个重要指标,其中受喷漆管的压力,流量,辐射面积以及喷漆距离等多种因素的影响。
3.现有的自动喷漆设备有笛卡尔直角坐标轴桁架机械手 夹具,笛卡尔直角坐标轴桁架机械手 6轴机器人 夹具,地轨 6轴机器人 夹具等,但是这些都存在运动控制系统复杂,机器人夹具可达性不够,整体结构可靠性不高,视觉系统和喷漆作业系统集中在机器人末端,进而产生了加重机器人负载,减小机器人姿态调整范围,夹具快换等问题。
技术实现要素:
4.本实用新型的目的在于提供一种提高6轴机器人的运动范围以及运动控制简单和可靠的视觉钣喷机器人的集成结构,以解决上述背景技术中提出的问题。
5.为实现上述目的,本实用新型提供如下技术方案:
6.一种视觉钣喷机器人,包括相对分布的两个桁架x轴,所述桁架x轴的底部均设有相对分布的立柱,所述桁架x轴之间设有桁架y轴,其中桁架y轴的两端分别与两个所述桁架x轴滑动连接,所述桁架y轴滑动连接有6轴机器人,其中6轴机器人的4、5、6轴高度集成。
7.进一步的:所述6轴机器人的1轴位置处设有喷壶。
8.进一步的:所述6轴机器人的6轴末端设有相机以及喷枪。
9.进一步的:所述桁架x轴之间设有桁架辅助梁。
10.进一步的:所述立柱通过托板以及侧向固定板与桁架x轴相连接。
11.进一步的:所述桁架x轴与桁架y轴上均设有拖链板。
12.与现有技术相比,本实用新型的有益效果是:本装置在6轴机器人的1轴位置处设置喷壶,从而提高机器人腕部末端姿态的灵活性,减少喷壶对机器人运动干涉及机器人末端负载的限制,减少机器人末端快换机构及流程动作,在6轴机器人的6轴末端设有相机以及喷枪,电气连接可靠,既可以视觉识别又可以喷漆的多功能机器人,使得6轴机器人的6轴处减少了喷壶等配件,简约末端夹具,通过该设置使得传统6 3桁架机器人结构中减少z轴重力方向的自由度,降低控制难度和电机数量和功率,提升结构负载能力及运动和刹车静止的可靠性,并且通过桁架x轴与桁架y轴的设置,比以往的6轴机器人多了两轴,使得6轴机器人能够水平运动,在6 3运动控制系统下,8轴机器人联动,比传统独立6轴机器人或地轨 6轴机器人运动范围广,运动控制简单和可靠。
附图说明
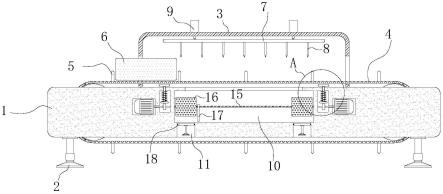
13.图1为本实用新型实施例中提供的一种视觉钣喷机器人整体结构示意图。
14.图2为本实用新型实施例中提供的一种视觉钣喷机器人6轴机器人结构示意图。
15.图3为本实用新型实施例中提供的一种视觉钣喷机器人立柱与桁架x轴连接示意图。
16.图中:1-桁架x轴、2-桁架y轴、3-6轴机器人、4-桁架辅助梁、5-立柱、6-拖链板、7-托板、8-侧向固定板、9-喷壶、10-相机、11-喷枪。
具体实施方式
17.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
18.以下结合具体实施例对本实用新型的具体实现进行详细描述。
19.在一个实施例中,请参阅图1-图2,一种视觉钣喷机器人,包括相对分布的两个桁架x轴1,所述桁架x轴1的底部均设有相对分布的立柱5,所述桁架x轴1之间设有桁架y轴2,其中桁架y轴2的两端分别与两个所述桁架x轴1滑动连接,所述桁架y轴2滑动连接有6轴机器人3,其中6轴机器人3的4、5、6轴高度集成。
20.在本实施例中,在对汽车喷漆时,可以将汽车置于桁架x轴1与桁架y轴2的下方,此时通过6轴机器人3对汽车进行喷漆,其中6轴机器人3的1轴位置处设置喷壶9,喷壶9可以通过快换夹具与1轴相连接,从而提高机器人腕部末端姿态的灵活性,减少喷壶9对机器人运动干涉及机器人末端负载的限制,减少机器人末端快换机构及流程动作,6轴机器人3的6轴末端设有相机10以及喷枪11,相机10以及喷枪11均固定安装在6轴末端处,电气连接可靠,既可以视觉识别又可以喷漆的多功能机器人,使得6轴机器人3的6轴处减少了喷壶9等配件,简约末端夹具,通过该设置使得传统6 3桁架机器人结构中减少z轴重力方向的自由度,降低控制难度和电机数量和功率,提升结构负载能力及运动和刹车静止的可靠性,并且通过桁架x轴1与桁架y轴2的设置,比以往的6轴机器人多了两轴,使得6轴机器人能够水平运动,在6 3运动控制系统下,8轴机器人联动,比传统独立6轴机器人或地轨 6轴机器人运动范围广(如:整个漆房空间),运动控制简单和可靠,比一般6轴机器人的456轴高度集成(类似3自由度的bbr机器人手腕结构),能在更小空间(如:漆房墙体与车的小空间,漆房吊顶与车顶狭小空间)灵活作业,在实际应用中可以通过驱动机构使得桁架y轴2沿着x轴滑动,6轴机器人3沿着桁架y轴y轴滑动,驱动机构可以为常见的丝杆转动,也可以为齿条、齿轮传动等等。
21.在另一个实施例中,请参阅图1,所述桁架x轴1之间设有桁架辅助梁4。
22.在本实施例中,通过桁架辅助梁4的设置能够有效的提高桁架x轴1之间的稳定性能,进而提高了6轴机器人3在工作时的稳定性能。
23.在另一个实施例中,请参阅图3,所述立柱5通过托板7以及侧向固定板8与桁架x轴1相连接。
24.在本实施例中,通过托板7对桁架x轴1进行支撑,通过侧向固定板8对桁架x轴1进行固定,能够有效的提高桁架x轴1的稳定性能。
25.在另一个实施例中,请参阅图1,所述桁架x轴1与桁架y轴2上均设有拖链板6。
26.在本实施例中,通过拖链板6的设置能够将多个短的桁架连接成一个长的桁架,从
而便于工作人员对该装置的组装。
27.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
技术特征:
1.一种视觉钣喷机器人,包括相对分布的两个桁架x轴;其特征在于,所述桁架x轴的底部均设有相对分布的立柱,所述桁架x轴之间设有桁架y轴,其中桁架y轴的两端分别与两个所述桁架x轴滑动连接,所述桁架y轴滑动连接有6轴机器人,其中6轴机器人的4、5、6轴高度集成。2.根据权利要求1所述的一种视觉钣喷机器人,其特征在于,所述6轴机器人的1轴位置处设有喷壶。3.根据权利要求1所述的一种视觉钣喷机器人,其特征在于,所述6轴机器人的6轴末端设有相机以及喷枪。4.根据权利要求1所述的一种视觉钣喷机器人,其特征在于,所述桁架x轴之间设有桁架辅助梁。5.根据权利要求1所述的一种视觉钣喷机器人,其特征在于,所述立柱通过托板以及侧向固定板与桁架x轴相连接。6.根据权利要求1-5任一所述的一种视觉钣喷机器人,其特征在于,所述桁架x轴与桁架y轴上均设有拖链板。
技术总结
本实用新型适用于钣喷技术领域,尤其涉及一种视觉钣喷机器人,包括相对分布的两个桁架X轴,所述桁架X轴的底部均设有相对分布的立柱,所述桁架X轴之间设有桁架Y轴,其中桁架Y轴的两端分别与两个所述桁架X轴滑动连接,所述桁架Y轴滑动连接有6轴机器人;本装置通过桁架X轴与桁架Y轴的设置,比以往的6轴机器人多了两轴,使得6轴机器人能够水平运动,运动范围更广,在6 3运动控制系统下,8轴机器人联动,比传统独立6轴机器人或地轨 6轴机器人或XYZ桁架 6轴机器人,运动控制更联动协作,与一般6轴机器人不同,其456轴高度集成,能在更小空间灵活作业。作业。作业。
技术研发人员:周艺龙 陈华锦 吴礼剑 郑庆诗 杨少阳 黄金波 袁进 王鑫 王伟
受保护的技术使用者:中铭谷智能机器人(广东)有限公司
技术研发日:2022.06.30
技术公布日:2022/10/28
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。