技术特征:
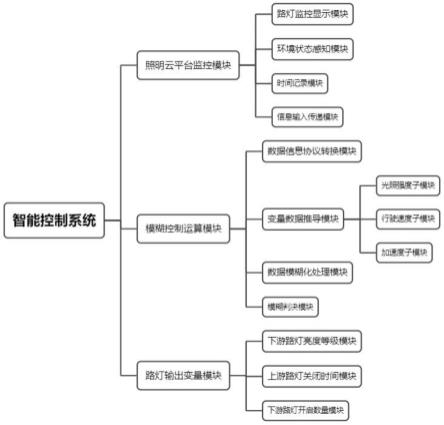
1.一种基于信息系统集成的智能控制系统,包括照明云平台监控模块、模糊控制运算模块和路灯输出变量模块,其特征在于:所述照明云平台监控模块用于对路灯运行状态、现场环境以及设备异常情况的监控,所述模糊控制运算模块用于根据接收到运算转换后的多个输入变量信息进行模糊控制运算,所述路灯输出变量模块用于根据输入变量计算对应的输出变量,所述照明云平台监控模块与模糊控制运算模块电连接,所述模糊控制运算模块和路灯输出变量模块电连接。2.根据权利要求1所述的一种基于信息系统集成的智能控制系统,其特征在于:所述照明云平台监控模块包括路灯监控显示模块、环境状态感知模块、时间记录模块和信息输入传递模块,所述路灯监控显示模块用于显示路灯的开启或关闭状态,所述环境状态感知模块用于传感器采集现场环境对应信息并进行处理转换,所述时间记录模块用于记录路灯的开启或关闭状态下对应的时间点,所述信息输入传递模块用于将数据信息进行上下关联设备的转发传递,所述路灯监控显示模块、环境状态感知模块、时间记录模块与信息输入传递模块电连接。3.根据权利要求2所述的一种基于信息系统集成的智能控制系统,其特征在于:所述模糊控制运算模块包括数据信息协议转换模块、变量数据推导模块、数据模糊化处理模块和模糊判决模块,所述数据信息协议转换模块用于将按需求采集的现场数据进行协调转发,所述变量数据推导模块用于采集推导计算路灯亮度等级、延时时间和开启数量所需的现场数据,所述数据模糊化处理模块用于将输入的数据变量进行分类和定量划分到不同模糊集内,所述模糊判决模块用于将经过模糊推力的输入数据进行解模糊处理并输出,所述变量数据推导模块包括光照强度子模块、行驶速度子模块和加速度子模块,所述光照强度子模块用于光照强度传感器实时采集记录光照强度值,所述行驶速度子模块用于超声波传感器检测计算行人或行驶汽车的速度值,所述加速度子模块用于表示速度的变化率,通过结合时间对计算出的速度值求偏导得出,所述行驶速度子模块与加速度子模块电连接,所述数据信息协议转换模块与变量数据推导模块电连接,所述数据模糊化处理模块与模糊判决模块电连接。4.根据权利要求3所述的一种基于信息系统集成的智能控制系统,其特征在于:所述路灯输出变量模块包括下游路灯亮度等级模块、上游路灯关闭时间模块和下游路灯开启数量模块,所述下游路灯亮度等级模块用于根据模糊化处理后的速度和光照强度推导计算出的下游路灯需开启的亮度等级,所述上游路灯关闭时间模块用于根据模糊化处理后的速度和加速度确定行人或车辆经过后上游路灯需延迟关闭的时间,所述下游路灯开启数量模块用于根据模糊控制的速度和加速度决策车辆或行人即将路过的下游的路灯开启数量,所述下游路灯亮度等级模块、上游路灯关闭时间模块与下游路灯开启数量模块电连接。5.一种基于权利要求1-4中任一项所述的一种基于信息系统集成的智能控制系统的智能控制方法,所述方法包括以下步骤:步骤s1:后半夜智能路灯系统开启,各个模块工作状态进行初始化,根据光照传感器采集到的现场照度值进行值判断;步骤s2:根据判断结果启用路灯照明,针对时间值进行多次判断,依据时间判断结果和现场照度值判断结果对道路状态选择不同的照明策略;步骤s3:依据照明策略开启低功耗模式后,通过热释红外线传感器传来的信号对应值
调用打开模糊控制,接收节点的速度值、加速度值以及照度值;步骤s4:进行输入数据的模糊化处理;步骤s5:利用模糊判决对路灯分配亮度等级,计算延时关闭的时间以及下游路灯开启的数量。6.根据权利要求5所述的一种基于信息系统集成的智能控制系统,其特征在于:所述步骤s2进一步包括以下步骤:步骤s21:光照传感器实时采集记录现场环境照度值,当采集到的亮度数值小于设定的亮度阈值时,以设定的额定功率控制开启路灯照明;步骤s22:对路灯开启时间进行第一次判断,确认是否超过了夜晚12点,当超过了12点后路灯开启低功耗模式,并以设定额定功率的30%对现场提供照明;步骤s23:对路灯开启时间进行第二次判断,判断时间是否到了早上7点,以及判断现场的照明度是否在设定阈值以上,得出双重判断结果;步骤s24:若两个判断结果同时满足,则路灯控制关闭,当两个判断条件没有同时满足时,继续以低功耗模式对现场提供照明。7.根据权利要求6所述的一种基于信息系统集成的智能控制系统,其特征在于:所述步骤s3进一步包括以下步骤:步骤s31:路灯开启低功耗模式后,以数字信号0和1表示两种环境状态,记录通过热释红外线传感器传来的信号值r,根据r是否置位控制模糊控制的开启关闭;步骤s32:路灯检测区域内,通过超声波传感器处理运算,得到车辆或行人行驶的速度v以及处理计算出加速度a,利用光照强度传感器采集路灯现场环境的光照强度d并进行传输;步骤s33:车辆行驶时的速度变化率即行驶汽车的加速度a,是采集的两次行驶汽车的速度,微控制单元再结合时间求偏导所得,即速度变化率为步骤s34:当道路上存在着行人或车辆即r=1时,传感器将采集到的速度v,光照强度d以及加速度a传递给模糊控制器,调用打开模糊控制进行数据的模糊化处理。8.根据权利要求7所述的一种基于信息系统集成的智能控制系统,其特征在于:所述步骤s4进一步包括以下步骤:步骤s41:将每个输入元素根据隶属度函数转变成对应的模糊语言,利用多输入多输出的模糊控制对所有采集数据进行模糊处理;步骤s42:对速度v进行模糊化,将车辆行驶的速度v在其论域[0,n]内划分为5个模糊子集,分别表示为[v1,v2,v3,v4,v5],用三角形的隶属度函数表示五个模糊集的等级;步骤s43:对加速度a进行模糊化,即同样利用三角形的隶度函数将加速度a的模糊论域[m,n]分为五个模糊子集,表示为[a1,a2,a3,a4,a5],分别对应速度论域中的五个模糊子集;步骤s44:对光照强度d根据等级的分配进行模糊化处理,即光照强度在论域[0,n]内划分为四个模糊子集,光照模糊集合为[d1,d2,d3,d4];步骤s45:搭建模糊规则,在输入与输出之间建立一对一和多对一的关系,明确路灯亮度与各个输入之间的关系,对模糊输出进行解模糊处理得到输出精确值。9.根据权利要求8所述的一种基于信息系统集成的智能控制系统,其特征在于:所述步
骤s5进一步包括以下步骤:步骤s51:利用光照强度d和汽车的行驶速度v共同决定车辆行驶方向的下一个路灯需要的亮度等级l,由传感器采集到的速度v和速度的变化率a共同决定上游路灯相应的延迟关闭时间t,并推出下游路灯开启数量n;步骤s52:路灯亮度等级l的调光在模糊控制时分为了五个等级,其模糊子集定义为[l1,l2,l3,l4,l5];步骤s53:模糊控制输出变量下游路灯点亮的延迟时间t的论域在[0,m]的时间内,依据车速v的不同以及经过相邻两个路灯的时间不同,将路灯延迟时间t划分为5个模糊子集,即[t1,t2,t3,t4,t5];步骤s54:下游路灯开启的个数n的模糊论域为[0,x],对路灯的照明个数n分为5个模糊子集,即[n1,n2,n3,n4,n5]。10.根据权利要求9所述的一种基于信息系统集成的智能控制系统,其特征在于:所述步骤s51进一步包括以下步骤:步骤s511:当检测到区域内存在行人或者车辆时,路灯的亮度等级l根据所检测到的速度v与当时的现场光照等级d,推算出照明等级;步骤s512:加速度a为负数时,加速度a越小路灯延时关闭时间t越长,加速度a为正数时,即汽车在行驶时加速时,加速度a越大延时时间t越小,对于速度v,速度v与路灯的关闭延时时间t呈负相关,即汽车行驶的越慢,路灯灭的越慢;步骤s513:对于下游路灯开启个数n,当速度v与加速度a越大时,下游路灯开启的路灯数量越多,即速度v以及加速度a与下游路灯开启的数量n成正比关系。
技术总结
本发明公开了一种基于信息系统集成的智能控制系统,包括照明云平台监控模块、模糊控制运算模块和路灯输出变量模块,所述照明云平台监控模块用于对路灯运行状态、现场环境以及设备异常情况的监控,所述模糊控制运算模块用于根据接收到运算转换后的多个输入变量信息进行模糊控制运算,所述路灯输出变量模块用于根据输入变量计算对应的输出变量,所述照明云平台监控模块与模糊控制运算模块电连接,所述模糊控制运算模块和路灯输出变量模块电连接,对路灯的控制采用多维模糊控制,明确路灯模糊控制的输入输出,将每个输入元素进行模糊化处理,进行模糊推理,本发明,具有路灯提供合适安全的照明环境且最大程度节能的特点。全的照明环境且最大程度节能的特点。全的照明环境且最大程度节能的特点。
技术研发人员:董春荣
受保护的技术使用者:董春荣
技术研发日:2022.03.23
技术公布日:2022/10/28
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。