1.本发明涉及一种垃圾桶,具体是一种垃圾桶的自动收口打包机构。
背景技术:
2.传统的垃圾桶一般包括桶体和桶盖,桶盖放置在桶体的上端口,桶盖上设有投放口,投放口处有可开合的翻盖,当桶内的垃圾装满时,需要卸下桶盖将垃圾袋的袋口收紧打结,在收口容易弄脏手,袋口打结也不方便;为了解决这一问题,有人提出了一种自动打包换袋智能垃圾桶,如公告cn 209871344 u公开了一种垃圾袋打包机构,包括一个安装底座,安装底座的中间形成垃圾投放口,安装底座上设置有一对平行的第一导向结构,两个第一导向结构分别设置在垃圾投放口的两个相对的第一侧边上;通过第一导向结构可滑动地安装有一对第一压杆,一对第一压杆的两端分别通过传动杆可转动地连接1对或2对第二压杆,传动杆的一端与第一压杆的一端可转动地连接,另一端与第二压杆可转动地连接,第一压杆和第二压杆可共同将垃圾袋收口至垃圾投放口的中间位置,还提供一种安装上述垃圾袋打包机构的智能垃圾桶。本实用新型确保了垃圾袋收口更加集中,垃圾袋收袋封口时受力更加均匀,提高了封口质量和封口的可靠性,减少了垃圾袋资源浪费。
3.上述这种结构第一压杆与第二压杆通过传动杆连接,并且需林转轴将两组传动机构连接连动,结构相对复杂,造成垃圾投放口尺寸缩小。
4.另外现有垃圾袋自动打包垃圾桶所使用的垃圾袋是需要定制,垃圾袋属于消耗品,较高的售价对于普通消费者不太友好,因此无法很好地普及,同时每打打包后还是需要人工将打包好的垃圾袋取出,在取出打包好的垃圾时,顺便套上新的垃圾袋也不是很麻烦的事情,因此对于普通消费者来说,自动放袋的功能显得比较鸡肋,而且现有的结构中,打包机构的结构不够合理。
技术实现要素:
5.本发明的目的在于提供一种垃圾桶的自动收口打包机构,适用于普通垃圾桶,在座体的垃圾投放口处设置有收口机构,收口机构能自动对垃圾袋进行收紧密封,待垃圾袋袋口收紧并封闭完成后,取下座体拿出装满垃圾的垃圾袋然后换上垃圾袋即可,具体卫生方便、通用性强的特点。
6.为实现上述目的采用以下技术方案:一种垃圾桶的自动收口打包机构,包括座体,座体上设有垃圾投放口和翻盖,翻盖控制垃圾投放口的开闭,其特征在于:在所述座体对应垃圾投放口的位置处设置有收口机构,所述的收口机构包括四根驱动杆、两根摆臂和驱动装置,在垃圾投放口四周设置有四根呈矩形排列的导向杆,四根驱动杆分成两组,分别为两根平行设置的横向驱动杆和两根平行设置的纵向驱动杆,驱动杆的两端与对应的导向杆配合,驱动装置驱动两根摆臂同步摆动,两根摆臂同步摆动时的方向相反,两根摆臂的输出端分别与两根横向驱动杆连接,摆臂摆动时驱动横向驱动杆沿着对应的导向杆移动,所述的横向驱动杆通过连杆驱动纵向驱动
杆同步移动,在驱动杆内侧的中部设置有热封装置,热封装置通过电路与控制器电连接,控制器同时控制驱动装置动作。
7.在两根摆臂的端部均设置有从动齿轮,摆臂通过从动齿轮的转轴枢接在座体上,在驱动装置的输出轴上设置有主动齿轮,主动齿轮与其中一个从动齿轮相啮合,主动齿轮通过传动齿轮与另一个从动齿轮相啮合。
8.在摆臂另一端的自由端上设置有凸柱,在横向驱动杆上设置有沿横向驱动杆长度方向的驱动槽,凸柱容置于驱动槽内并在驱动槽内相对滑动。
9.每根纵向驱动杆都通过两根连杆分别两根横向驱动杆连接,两根连杆一端铰接在纵向驱动杆的中部,两根连杆的另一端分别铰接在两根横向驱动杆同侧的端部;在两根横向驱动杆相向移动时,横向驱动杆通过连杆驱动纵向驱动杆向横向驱动杆的中部移动,两根横向驱动杆背离方向移动时,横向驱动杆通过连杆驱动纵向驱动杆向横向驱动杆端部位置移动。
10.所述的热封装置设置有横向驱动杆内侧的中部;在横向驱动杆位于热封装置的两侧设置有避让槽,所述的纵向驱动杆在座体内部对应驱动杆端部的起始位置和终点位置处设置有位置感应器或行程开关,位置感应器或行程开关与控制器电路连接。
11.所述的动力机构为驱动电机或手动驱动臂,驱动电机或手动驱动臂的输出轴带动其中一组驱动轮旋转,该组驱动轮通过同步带实现其它各组驱动轮同步旋转。
12.本发明通过驱动机构直接带动两根摆臂,两根摆臂的摆动方向相反,从而实现横向驱动杆沿着导向杆相向或相反方向移动,横向驱动杆在移动时通过连杆带动纵向驱动杆联动,在两根横向驱动杆相向移动时,横向驱动杆通过连杆将驱动纵向驱动杆向横向驱动杆的中部移动,最终实现垃圾袋收口;当两根横向驱动杆背离方向移动时,横向驱动杆通过连杆驱动纵向驱动杆向横向驱动杆部部位置移动,实现驱动杆复位,本发明传动机构只有两根摆臂和四根连杆,不占用空间且结构非常简单,从而不会挤占垃圾投放口的空间,因此本发明具有结构合理、卫生方便、通用性强的特点。
附图说明
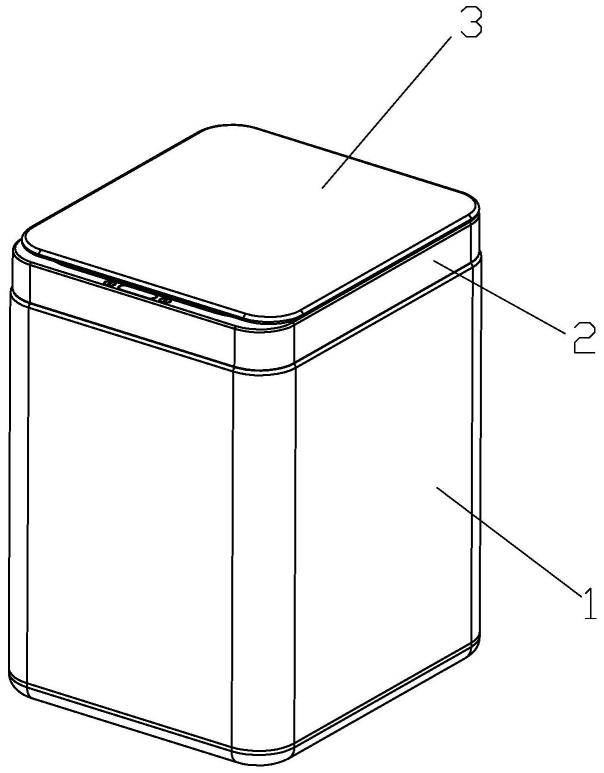
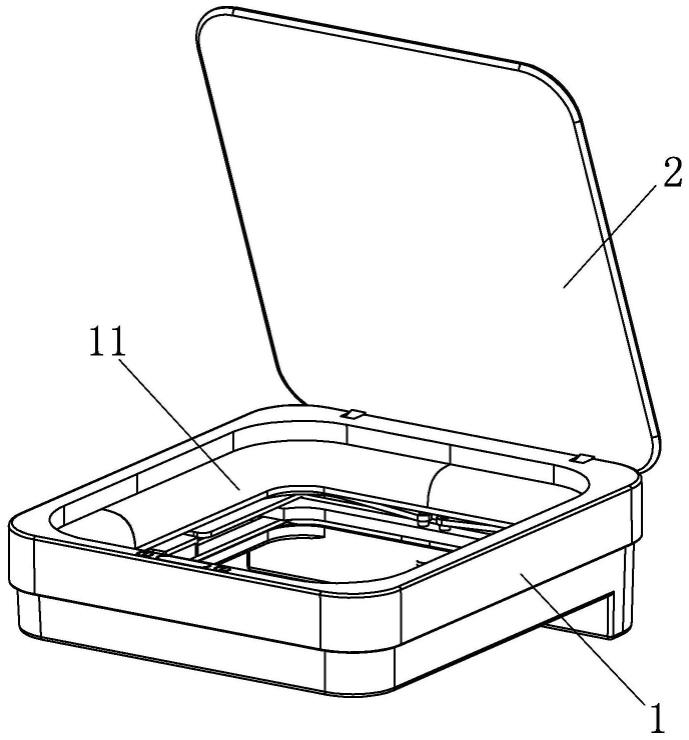
13.图1为本发明的结构示意图;图2为本发明底体的结构示意图;图3为本发明的内部结构示意图;图4为本发明收袋时的内部结构示意图;图5为本发明座体底板的结构示意图。
14.图6为本发明收口机构初始状态的结构示意图(一);图7为本发明收口机构初始状态的结构示意图(二);图8为本发明收口机构收袋状态的结构示意图(一);图9为本发明收口机构收袋状态的结构结构示意图(二)。
具体实施方式
15.如图1-9所示,一种垃圾桶的自动收口打包机构,包括座体1,座体1上设有垃圾投
放口11和翻盖2,翻盖2控制垃圾投放口11的开闭,在所述座体1对应垃圾投放口11的位置处设置有收口机构,所述的收口机构包括四根驱动杆、两根摆臂4和驱动装置5,在垃圾投放口11四周设置有四根呈矩形排列的导向杆12和/或导向槽13,四根驱动杆分成两组,分别为两根平行设置的横向驱动杆31和两根平行设置的纵向驱动杆32,所述的驱动杆端部开设有轴孔和/或导向块36,驱动杆通过轴孔套设在导向杆上,导向块36容置于导向槽13内;驱动装置5驱动两根摆臂4同步摆动,两根摆臂4同步摆动时的方向相反,两根摆臂4的输出端分别与两根横向驱动杆31连接,摆臂4摆动时驱动横向驱动杆31沿着对应的导向杆12和/或导向槽13移动,每根纵向驱动杆32都通过两根连杆33分别两根横向驱动杆31连接,两根连杆33一端铰接在纵向驱动杆32的中部,两根连杆33的另一端分别铰接在两根横向驱动杆31同侧的端部;在两根横向驱动杆31相向移动时,横向驱动杆31通过连杆33将驱动纵向驱动杆32向横向驱动杆31的中部移动,两根横向驱动杆31向背离方向移动时,横向驱动杆31通过连杆33驱动纵向驱动杆32向横向驱动杆31端部位置移动;在座体1内部对应驱动杆起始位置和终点位置处设置有位置感应器或行程开关7,位置感应器或行程开关7与控制器电路连接。
16.在驱动杆内侧的中部设置有热封装置6,热封装置6通过电路与控制器电连接,控制器同时控制驱动装置5动作;所述的热封装置6设置有横向驱动杆31内侧的中部;在横向驱动杆31位于热封装置的两侧设置有避让槽35,所述的纵向驱动杆两端穿过对应的避让槽35。
17.在两根摆臂4的端部均设置有从动齿轮41,摆臂4通过从动齿轮41的转轴枢接在座体1上,所述的动力机构5为驱动电机或手动驱动臂,驱动电机或手动驱动臂的输出轴上设有主动齿轮51,主动齿轮51与其中一个从动齿轮41相啮合,主动齿轮51通过传动齿轮52与另一个从动齿轮41相啮合;主动齿轮通过传动齿轮与另一个从动齿41相啮合从而实现两个摆臂摆动方向相反;在摆臂4另一端的自由端上设置有凸柱42,在横向驱动杆31上设置有沿横向驱动杆长度方向的驱动槽34,凸柱42容置于驱动槽34内并在驱动槽内相对滑动;摆臂4带动横向驱动杆31移动时随着角度的变化,横向驱动杆31与摆臂4转轴之间距离会发生变化,设置驱动槽33使得凸柱在驱动槽33内滑动,确保部件正常工作。
18.本发明工作过程这样的:驱动装置5驱动两根摆臂4摆动向中间摆动,摆臂4带动两根横向驱动杆31向中间靠拢,横向驱动杆31向中间靠拢时通过连杆33带动纵向驱动杆32一起向中间靠拢联动,四根驱动杆相线配合将垃圾袋袋口集中在垃圾投放口11中间位置,此时会触发位置感应器或行程开关7,控制器停止驱动装置5并开启热封装置6,热封装置6将垃圾袋袋口融合密封;然后热封装置6断电,并且驱动装置5反转,横向驱动杆31和纵向驱动杆32复位,本发明传动机构只有两根摆臂和四根连杆,不占用空间且结构非常简单,从而不会挤占垃圾投放口的空间,因此相对于相同尺寸的自动打包垃圾桶本发明具有更大的垃圾投放口尺寸;本发明具有结构合理、卫生方便、通用性强的特点。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。