旋转角度检测装置
1.相关申请的交叉引用
2.本技术是基于2020年3月11日提出的日本专利申请第2020-042066号的申请,将其记载内容通过参照引用于此。
技术领域
3.本公开涉及旋转角度检测装置。
背景技术:
4.以往,如专利文献1所记载,已知有一种通过霍尔元件将根据旋转体的旋转角度而变化的磁通密度转换为电压来检测旋转角度的装置。
5.现有技术文献
6.专利文献
7.专利文献1:日本特开2008-139108号公报
技术实现要素:
8.根据发明人的研究,在专利文献1所记载的这种装置中,例如,在旋转角度180度附近,根据旋转角度而变化的电压从最大值切换为零。在该电压切换的范围内,与切换前的旋转角度对应的电压和与切换时的旋转角度对应的电压重叠,旋转角度和电压不是一对一的关系,因此不能检测适当的旋转角度。因此,在将自电压切换时起的规定范围的旋转角度的计算排除在外的前提下建立旋转角度和电压的一对一的关系,由此根据电压计算适当的旋转角度。由此,专利文献1所记载的这种装置因为具有不能检测旋转角度的范围,所以不能不间断地检测旋转角度。本公开的目的在于提供一种能够不间断地检测旋转角度的旋转角度检测装置。
9.根据本公开的一个观点,旋转角度检测装置具备:检测部,其输出以第一周期根据旋转体的旋转角度进行变化的第一输出值,并输出以第二周期根据旋转角度进行与第一输出值的变化正负不同的变化的第二输出值,在第一周期的一个周期中的多个旋转角度下,第一输出值的大小和第二输出值的大小伴随着旋转角度的变化而变化,第一周期以旋转角度的规定的范围为一个周期,第二周期以与第一周期不同的旋转角度的范围为一个周期;选择器部,其从第一输出值及第二输出值中选择第一阈值以上且第二阈值以下的值,第一阈值是与多个旋转角度对应的第一输出值中的最小值,第二阈值是与多个旋转角度对应的第一输出值中的最大值;以及运算部,其基于由选择器部选择的值,计算与旋转角度相关的值。
10.由此,在第一阈值以上第二阈值以下的范围内,从检测部输出的值是在任意的旋转角度下连续且与旋转角度为一对一的关系的值。因此,由该选择器部选择的值是在任意的旋转角度θ下连续且与旋转角度θ为一对一的关系的值。因而,基于在任意的旋转角度θ下连续且与旋转角度θ为一对一的关系的值计算旋转角度,因此旋转角度检测装置能够不间
断地检测旋转角度。
11.此外,对各构成要素等标注的带括号的参照标记表示该构成要素等与后述的实施方式所记载的具体构成要素等的对应关系的一例。
附图说明
12.图1是第一实施方式的旋转角度检测装置的立体图。
13.图2是从图1的箭头ii观察到的旋转角度检测装置的结构图。
14.图3是用于说明旋转角度检测装置的磁路的图。
15.图4是旋转角度检测装置的第一传感器的结构图。
16.图5是旋转角度检测装置的第二传感器的结构图。
17.图6是旋转角度检测装置的选择器部的结构图。
18.图7是旋转角度、磁通、第一输出电压以及第二输出电压的关系图。
19.图8是用于说明旋转体进行旋转时的磁路的图。
20.图9是旋转角度、第一输出电压、第二输出电压以及向旋转角度运算部输出的电压的关系图。
21.图10是表示第二实施方式的旋转角度检测装置的选择器部的处理的流程图。
22.图11是第三实施方式的旋转角度检测装置的旋转角度、第一输出电压、第二输出电压以及向旋转角度运算部输出的电压的关系图。
23.图12是第四实施方式的旋转角度检测装置的旋转角度、第一输出电压、第二输出电压以及向旋转角度运算部输出的电压的关系图。
24.图13是第五实施方式的旋转角度检测装置的结构图。
25.图14是第五实施方式的旋转角度检测装置的传感器的结构图。
26.图15是第六实施方式的旋转角度检测装置的结构图。
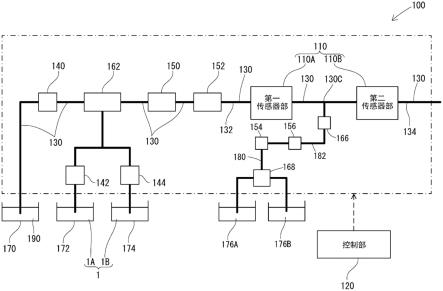
27.图16是第七实施方式的旋转角度检测装置的结构图。
28.图17是第八实施方式的旋转角度检测装置的结构图。
29.图18是其他实施方式的旋转角度检测装置的旋转角度、第一输出电压、第二输出电压以及向旋转角度运算部输出的电压的关系图。
30.图19是其他实施方式的旋转角度检测装置的选择器部的结构图。
具体实施方式
31.下面,参照附图对实施方式进行说明。此外,在以下的各个实施方式中,对于彼此相同或等同的部分,标注相同的标记并省略其说明。
32.《第一实施方式》
33.如图1及图2所示,旋转角度检测装置1具备旋转体10、磁场产生部20、旋转角度检测部30、选择器部40、切换部75及旋转角度运算部80。
34.旋转体10形成为圆柱状,以轴线o为中心进行旋转。在此,下面,为方便起见,将与轴线o正交的方向记载为径向。
35.磁场产生部20形成为筒状。另外,磁场产生部20与旋转体10的一端面101连接。而且,磁场产生部20的中心轴与旋转体10的轴线o一致。由此,磁场产生部20与旋转体10一同
以轴线o为中心进行旋转。另外,磁场产生部20在旋转体10的周边产生磁场。具体而言,磁场产生部20具有第一磁轭201、第二磁轭202、第一磁铁211及第二磁铁212。
36.第一磁轭201由软磁性体形成为半圆筒状。具体而言,第一磁轭201包含第一圆弧部221、第一延长部231、第二圆弧部222及第二延长部232。
37.第一圆弧部221形成为圆弧状。
38.第一延长部231与第一圆弧部221的一端连接。另外,第一延长部231从第一圆弧部221的一端朝向径向外侧延伸。
39.第二圆弧部222形成为圆弧状。另外,第二圆弧部222的一端与第一圆弧部221的另一端连接。
40.第二延长部232与第二圆弧部222的另一端连接。另外,第二延长部232从第二圆弧部222的另一端朝向径向外侧延伸。
41.与第一磁轭201相同,第二磁轭202由软磁性体形成为半圆筒状。具体而言,第二磁轭202包含第三圆弧部223、第三延长部233、第四圆弧部224及第四延长部234。
42.第三圆弧部223形成为圆弧状。
43.第三延长部233与第三圆弧部223的一端连接。另外,第三延长部233从第三圆弧部223的一端朝向径向外侧延伸。
44.第四圆弧部224形成为圆弧状。另外,第四圆弧部224的一端与第三圆弧部223的另一端连接。
45.第四延长部234与第四圆弧部224的另一端连接。另外,第四延长部234从第四圆弧部224的另一端朝向径向外侧延伸。
46.第一磁铁211由钕磁铁等形成为板状。另外,第一磁铁211以被第一延长部231和第三延长部233夹持的方式与第一延长部231及第三延长部233连接。而且,在此,第一磁铁211中的第一磁轭201侧被磁化为n极。另外,第一磁铁211中的第二磁轭202侧被磁化为s极。此外,也可以是,第一磁铁211中的第一磁轭201侧被磁化为s极,且第一磁铁211中的第二磁轭202侧被磁化为n极。
47.通过该第一磁铁211,如图3所示,生成第一磁路m1。该第一磁路m1包含从第一磁铁211的n极流经第一延长部231、第一圆弧部221的磁通。另外,第一磁路m1包含从第一圆弧部221和第二圆弧部222的边界部流经磁场产生部20的轴线o附近、第三圆弧部223和第四圆弧部224的边界部、第三圆弧部223、第三延长部233、第一磁铁211的s极的磁通。
48.第二磁铁212与第一磁铁211同样地形成。另外,第二磁铁212以被第二延长部232和第四延长部234夹持的方式与第二延长部232及第四延长部234连接。而且,第二磁铁212被配置在与第一磁铁211关于轴线o对称的位置。另外,与第一磁铁211相同,第二磁铁212被磁化。具体而言,第二磁铁212中的第一磁轭201侧被磁化为n极。而且,第二磁铁212中的第二磁轭202侧被磁化为s极。
49.通过该第二磁铁212,生成第二磁路m2。该第二磁路m2包含从第二磁铁212的n极流经第二延长部232、第二圆弧部222的磁通。另外,第二磁路m2包含从第一圆弧部221和第二圆弧部222的边界部流经磁场产生部20的轴线o附近、第三圆弧部223和第四圆弧部224的边界部、第四圆弧部224、第四延长部234、第二磁铁212的s极的磁通。由此,在磁场产生部20的轴线o附近,流通由流经第一磁路m1的磁通和流经第二磁路m2的磁通相互增强的磁通。
50.旋转角度检测部30配置于磁场产生部20的轴线o附近。由此,流经第一磁路m1及第二磁路m2的磁通在旋转角度检测部30中流通。另外,旋转角度检测部30基于该流经第一磁路m1及第二磁路m2的磁通,输出与旋转体10的旋转角度θ相应的信号。具体而言,旋转角度检测部30具有第一传感器31及第二传感器32。
51.如图4所示,第一传感器31包含第一霍尔元件301、第二霍尔元件302及第一输出运算电路311。另外,如图2所示,第一传感器31包含第一电源端子321、第一接地端子331及第一输出端子341。在此,以与旋转体10的轴线o正交的一方向为x方向。另外,以与轴线o方向及x方向正交的方向为y方向。
52.第一霍尔元件301为卧式霍尔元件,将与沿垂直于未图示的检测面的方向流通的磁通相应的信号、在此为与沿x方向流向第一传感器31的磁通相应的信号输出到后述的第一输出运算电路311。
53.第二霍尔元件302为立式霍尔元件,将与沿平行于未图示的检测面的方向流通的磁通相应的信号、在此为与沿y方向流向第一传感器31的磁通相应的信号输出到后述的第一输出运算电路311。
54.第一输出运算电路311基于来自第一霍尔元件301的信号及来自第二霍尔元件302的信号,输出与旋转体10的旋转角度θ对应的电压。在此,下面,为方便起见,将来自第一输出运算电路311的输出记载为第一输出电压vs1。该第一输出电压vs1与第一输出值对应,例如被调整为0~5v。
55.第一电源端子321与未图示的电源连接。第一接地端子331与未图示的大地连接。如图2所示,第一输出端子341连接于第一输出运算电路311和后述的选择器部40及切换部75。由此,来自第一输出运算电路311的输出即第一输出电压vs1被施加于后述的选择器部40及切换部75。
56.在此,第二传感器32以与第一传感器31在x方向上对置的方式配置。另外,如图5所示,第二传感器32包含第三霍尔元件303、第四霍尔元件304及第二输出运算电路312。另外,如图2所示,第二传感器32包含第二电源端子322、第二接地端子332、第二输出端子342。
57.第三霍尔元件303与第一霍尔元件301同样为卧式霍尔元件,将与沿x方向流向第二传感器32的磁通相应的信号输出到后述的第二输出运算电路312。
58.第四霍尔元件304与第二霍尔元件302同样为立式霍尔元件,将与沿y方向流向第二传感器32的磁通相应的信号输出到后述的第二输出运算电路312。
59.第二输出运算电路312基于来自第三霍尔元件303的信号及来自第四霍尔元件304的信号,输出与旋转体10的旋转角度θ对应的电压。在此,下面,为方便起见,将来自第二输出运算电路312的电压记载为第二输出电压vs2。该第二输出电压vs2与第二输出值对应,与第一输出电压vs1同样,该第二输出电压vs2例如被调整为0~5v。
60.第二电源端子322与未图示的电源连接。第二接地端子332与未图示的大地连接。如图2所示,第二输出端子342连接于第二输出运算电路312和后述的选择器部40及切换部75。由此,来自第二输出运算电路312的输出即第二输出电压vs2被施加于后述的选择器部40及切换部75。
61.选择器部40选择第一输出电压vs1及第二输出电压vs2中的某一方作为向后述的旋转角度运算部80施加的电压。另外,选择器部40将表示该选择的电压的信号输出到旋转
角度运算部80。而且,选择器部40通过控制后述的切换部75,向旋转角度运算部80施加该选择的电压。具体而言,选择器部40以模拟电路为主体构成,如图6所示,具有第一比较器41、第二比较器42、第三比较器43、第四比较器44、第五比较器45及第六比较器46。另外,选择器部40具有第一nand电路51、第二nand电路52、第三nand电路53、and电路60及sr锁存电路70。
62.向第一比较器41的非反相输入端子输入第一输出电压vs1。另外,向第一比较器41的反相输入端子输入第一阈值vs_th1。由此,第一比较器41基于第一输出电压vs1和第一阈值vs_th1的比较结果,变更输出信号的电平。此外,在此,第一阈值vs_th1例如被设定为第一输出电压vs1及第二输出电压vs2的最大电压即5v的10%~25%、即0.5~1.25v。
63.向第二比较器42的非反相输入端子输入第二阈值vs_th2。另外,向第二比较器42的反相输入端子输入第一输出电压vs1。由此,第二比较器42基于第二阈值vs_th2和第一输出电压vs1的比较结果,变更输出信号的电平。此外,在此,第二阈值vs_th2被设定为比第一阈值vs_th1大的电压。例如,第二阈值vs_th2被设定为第一输出电压vs1及第二输出电压vs2的最大电压即5v的75%~90%、即3.75~4.5v。
64.向第三比较器43的非反相输入端子输入第一输出电压vs1。另外,向第三比较器43的反相输入端子输入第三阈值vs_th3。由此,第三比较器43基于第一输出电压vs1和第三阈值vs_th3的比较结果,变更输出信号的电平。此外,在此,第三阈值vs_th3被设定为比第一阈值vs_th1大且比后述的第四阈值vs_th4小的电压。
65.向第四比较器44的非反相输入端子输入第四阈值vs_th4。另外,向第四比较器44的反相输入端子输入第一输出电压vs1。由此,第四比较器44基于第四阈值vs_th4和第一输出电压vs1的比较结果,变更输出信号的电平。此外,在此,第四阈值vs_th4被设定为比第三阈值vs_th3大且比第二阈值vs_th2小的电压。
66.向第五比较器45的非反相输入端子输入第二输出电压vs2。另外,向第五比较器45的反相输入端子输入第三阈值vs_th3。由此,第五比较器45基于第二输出电压vs2和第三阈值vs_th3的比较结果,变更输出信号的电平。
67.向第六比较器46的非反相输入端子输入第四阈值vs_th4。另外,向第六比较器46的反相输入端子输入第二输出电压vs2。由此,第六比较器46基于第四阈值vs_th4和第二输出电压vs2的比较结果,变更输出信号的电平。
68.第一nand电路51通过运算来自第一比较器41的信号和来自第二比较器42的信号的逻辑与非,变更输出信号的电平。
69.第二nand电路52通过运算来自第三比较器43的信号和来自第四比较器44的信号的逻辑与非,变更输出信号的电平。
70.第三nand电路53通过运算来自第五比较器45的信号和来自第六比较器46的信号的逻辑与非,变更输出信号的电平。
71.and电路60通过运算来自第二nand电路52的信号和来自第三nand电路53的信号的逻辑与,变更输出信号的电平。
72.向sr锁存电路70的s端子输入来自第一nand电路51的信号。另外,向sr锁存电路70的r端子输入来自and电路60的信号。由此,sr锁存电路70基于来自第一nand电路51的信号及来自and电路60的信号,变更来自q拔端子的输出信号的电平。
73.如图2所示,切换部75与旋转角度检测部30、选择器部40及旋转角度运算部80电连
接。另外,切换部75基于来自选择器部40中的sr锁存电路70的q拔端子的信号,将向旋转角度运算部80输出的电压切换为第一输出电压vs1及第二输出电压vs2中的某一方。具体而言,切换部75具有缓冲器76及开关77。
74.在缓冲器76中,存储来自sr锁存电路70的q拔端子的信号。
75.开关77例如为spdt。另外,开关77基于存储于缓冲器76的信号,将向旋转角度运算部80输出的电压切换为第一输出电压vs1及第二输出电压vs2中的某一方。此外,spdt为single-pole double-throw(单刀双掷)的缩写。
76.旋转角度运算部80例如以微机为主体构成,具备cpu、rom、ram、快闪存储器、i/o以及将这些结构连接的总线等。旋转角度运算部80通过执行存储于rom的程序,基于来自sr锁存电路70的q拔端子的信号以及经由开关77施加的电压,计算旋转体10的旋转角度θ。rom、ram、快闪存储器分别为非过渡性实体存储介质。
77.如以上那样,构成了旋转角度检测装置1。该旋转角度检测装置1能够不间断地检测旋转角度θ。
78.接着,对由该旋转角度检测装置1进行的旋转角度θ的计算进行说明。为了进行该说明,对第一输出电压vs1及第二输出电压vs2进行说明。在此,为方便起见,将初始状态的旋转角度θ设为零。在从图1的箭头ii观察时,将绕轴线o的方向中的顺时针设为旋转角度θ的正向。在此,将旋转角度θ的单位设为度。在图中,旋转角度θ的单位的度被表示为deg。将流经第一磁路m1及第二磁路m2的磁通中的流向第一传感器31的磁通设为第一磁通φ1。将第一磁通φ1中的由第一传感器31检测出的磁通设为第一x方向磁通φx1。将第一磁通φ1中的由第一传感器31检测出的磁通设为第一y方向磁通φy1。将流经第一磁路m1及第二磁路m2的磁通中的流向第二传感器32的磁通设为第二磁通φ2。将第二磁通φ2中的由第二传感器32检测出的磁通设为第二x方向磁通φx2。将第二磁通φ2中的由第二传感器32检测出的磁通设为第二y方向磁通φy2。
79.在初始状态下,如图2所示,第一磁铁211及第二磁铁212位于穿过轴线o且沿y方向延伸的同一直线上。此时,在第一磁路m1及第二磁路m2中,第一磁通φ1仅沿x方向流向第一传感器31,而不沿y方向流向第一传感器31。因此,如图7所示,第一x方向磁通φx1为第一磁通φ1。另外,第一y方向磁通φy1为零。而且,在第一磁路m1及第二磁路m2中,第二磁通φ2仅沿x方向流向第二传感器32,而不沿y方向流向第二传感器32。因此,第二x方向磁通φx2为第二磁通φ2。另外,第二y方向磁通φy2为零。
80.另外,如图8所示,在旋转体10沿正向旋转旋转角度θ时,磁场产生部20与旋转体10一同进行旋转,因此第一磁铁211及第二磁铁212进行旋转。此时,第一磁路m1及第二磁路m2的方向发生变化。因此,在第一磁路m1及第二磁路m2中,第一磁通φ1沿与x方向及y方向交叉的方向流向第一传感器31。由此,第一x方向磁通φx1如以下关系式(1-1)所示那样由第一磁通φ1和旋转角度θ表示。另外,第一y方向磁通φy1如以下关系式(1-2)所示那样由第一磁通φ1和旋转角度θ表示。另外,在第一磁路m1及第二磁路m2中,第二磁通φ2沿与x方向及y方向交叉的方向流向第二传感器32。由此,第二x方向磁通φx2如以下关系式(2-1)所示那样由第二磁通φ2和旋转角度θ表示。而且,第二y方向磁通φy2如以下关系式(2-2)所示那样由第二磁通φ2和旋转角度θ表示。因而,如图7所示,第一x方向磁通φx1、第一y方向磁通φy1、第二x方向磁通φx2及第二y方向磁通φy2成为三角波形。此外,在图7中,用虚线记
载了第一x方向磁通φx1及第二x方向磁通φx2。用实线记载了第一y方向磁通φy1及第二y方向磁通φy2。
81.φx1=φ1
×
cosθ
…
(1-1)
82.φy1=φ1
×
sinθ
…
(1-2)
83.φx2=φ2
×
cosθ
…
(2-1)
84.φy2=φ2
×
sinθ
…
(2-2)
85.基于该第一x方向磁通φx1及第一y方向磁通φy1,第一输出运算电路311如以下关系式(3-1)所示那样计算第一输出电压vs1。在此,在关系式(3-1)中,k1为与旋转角度θ相关的系数。在此,k1被设定为正值。另外,v1为常数。在此,v1被设定为:在旋转角度θ为零时,第一输出电压vs1为零。
86.vs1=k1
×
arctan(φy1/φx1) v1
87.=k1
×
θ v1
…
(3-1)
88.因而,如图7所示,在旋转角度θ为零时,第一输出电压vs1为零,v1为零。另外,因为k1为正数,所以在旋转角度θ为零以上且低于360度时,第一输出电压vs1随着旋转角度θ的变大而变大。而且,第一输出电压vs1在旋转角度θ即将成为360度之前变为最大值。另外,第一输出电压vs1在旋转角度θ成为360度时返回到零。而且,第一输出电压vs1是以第一周期进行输出的,该第一周期以随着旋转角度θ的变大而变大的范围、例如以从旋转角度θ为零以上到低于360的范围为一个周期。此外,在图7中,用实线记载了第一输出电压vs1。
89.这样,第一输出运算电路311计算第一输出电压vs1。另外,第一输出运算电路311将该计算出的第一输出电压vs1输出到选择器部40及切换部75。
90.同样,基于上述的第二x方向磁通φx2及第二y方向磁通φy2,第二输出运算电路312如以下关系式(3-2)所示那样计算第二输出电压vs2。在此,在关系式(3-2)中,k2为与旋转角度θ相关的系数。另外,k2被设定为与k1正负不同。因此,k2被设定为负值。而且,k2的绝对值被设定为与k1的绝对值相同的值。另外,v2为常数。例如,v2被设定为:在旋转角度θ为180度时,第二输出电压vs2为零。
91.vs2=k2
×
arctan(φy2/φx2) v2
92.=k2
×
θ v2
…
(3-2)
93.因而,如图7所示,在旋转角度θ为零时,第二输出电压vs2为v2。另外,因为k2为负数,所以在旋转角度θ为零以上且低于180度时,第二输出电压vs2随着旋转角度θ的变大而变小。而且,在旋转角度θ变为180度时,第二输出电压vs2变为零。另外,第二输出电压vs2在旋转角度θ刚刚超过180度之后成为最大值。而且,在旋转角度θ大于180度且低于360度时,第二输出电压vs2随着旋转角度θ的变大而变小。另外,在旋转角度θ变为360度时,第二输出电压vs2返回到v2。而且,第二输出电压vs2在360度以上且540度以下时随着旋转角度θ的变大而变小。另外,第二输出电压vs2是以第二周期进行输出的,该第二周期以随着旋转角度θ的变大而变小的范围、例如以旋转角度θ大于180度且为540度以下的范围为一个周期。此外,第二周期的旋转角度θ的范围与第一周期的旋转角度θ的范围不同。另外,在图7中,用虚线记载了第二输出电压vs2。
94.这样,第二输出运算电路312计算第二输出电压vs2。另外,第二输出运算电路312将该计算出的第二输出电压vs2输出到选择器部40及切换部75。
95.接着,为了对旋转角度θ的计算进行说明,参照图9的旋转角度θ、第一输出电压vs1及第二输出电压vs2的关系图对选择器部40、切换部75及旋转角度运算部80的处理进行说明。此外,在图9中,用实线记载了第一输出电压vs1。另外,用虚线了记载第二输出电压vs2。
96.在初始状态下,旋转角度θ为零。此时,第一输出电压vs1为零。在将该第一输出电压vs1输入到选择器部40时,由于第一输出电压vs1低于第一阈值vs_th1,因此第一比较器41将低电平l的信号输出到第一nand电路51。另外,由于第一输出电压vs1为第二阈值vs_th2以下,因此第二比较器42将高电平h的信号输出到第一nand电路51。由此,第一nand电路51将高电平h的信号输出到sr锁存电路70的s端子。
97.另外,由于第一输出电压vs1低于第三阈值vs_th3,因此第三比较器43将低电平l的信号输出到第二nand电路52。而且,由于第一输出电压vs1为第四阈值vs_th4以下,因此第四比较器44将高电平h的信号输出到第二nand电路52。由此,第二nand电路52将高电平h的信号输出到and电路60。
98.另外,在初始状态下,第二输出电压vs2为v2。而且,在此,v2被设定为比第三阈值vs_th3大且比第四阈值vs_th4小的电压。在将该第二输出电压vs2输入到选择器部40时,由于第二输出电压vs2为第三阈值vs_th3以上,因此第五比较器45将高电平h的信号输出到第三nand电路53。另外,由于第二输出电压vs2为第四阈值vs_th4以下,因此第六比较器46将高电平h的信号输出到第三nand电路53。由此,第三nand电路53将低电平l的信号输出到and电路60。
99.因而,向and电路60输入的信号为来自第二nand电路52的高电平h的信号和来自第三nand电路53的低电平l的信号。因此,and电路60将低电平l的信号输出到sr锁存电路70的r端子。
100.因此,向sr锁存器的s端子输入的信号为高电平h。另外,向sr锁存电路70的r端子输入的信号为低电平l。因此,sr锁存电路70将低电平l的信号从q拔端子输出到切换部75及旋转角度运算部80。
101.切换部75若接收来自sr锁存电路70的低电平l的信号,则将向旋转角度运算部80输出的电压设为第二输出电压vs2。此外,在图9中,从切换部75向旋转角度运算部80输出的电压被记载为输出电压。另外,在从切换部75向旋转角度运算部80输出的电压为第一输出电压vs1的情况下,该输出电压与第一输出电压vs1同样以实线记载。而且,在从切换部75向旋转角度运算部80输出的电压为第二输出电压vs2的情况下,该输出电压与第二输出电压vs2同样以虚线记载。
102.旋转角度运算部80接收来自sr锁存电路70的低电平l的信号。由此,旋转角度运算部80判定为第二输出电压vs2被施加于旋转角度运算部80。另外,此时,如上所述,由切换部75向旋转角度运算部80施加的电压为第二输出电压vs2。因而,旋转角度运算部80基于第二输出电压vs2计算旋转角度θ。具体而言,旋转角度运算部80通过将k2、v2以及向旋转角度运算部80施加的第二输出电压vs2代入上述关系式(3-2),计算旋转角度θ。
103.通过使旋转体10从初始状态进行旋转,旋转角度θ变得大于零且为θ1以下。通过旋转角度θ变大,第一输出电压vs1变大。此时,第一输出电压vs1变得大于零且低于第一阈值vs_th1。在将该第一输出电压vs1输入到选择器部40时,由于第一输出电压vs1低于第一阈值vs_th1,因此第一比较器41将低电平l的信号输出到第一nand电路51。另外,由于第一输
出电压vs1为第二阈值vs_th2以下,因此第二比较器42将高电平h的信号输出到第一nand电路51。由此,第一nand电路51将高电平h的信号输出到sr锁存电路70的s端子。
104.另外,由于第一输出电压vs1低于第三阈值vs_th3,因此第三比较器43将低电平l的信号输出到第二nand电路52。而且,由于第一输出电压vs1为第四阈值vs_th4以下,因此第四比较器44将高电平h的信号输出到第二nand电路52。由此,第二nand电路52将高电平h的信号输出到and电路60。
105.另外,通过旋转角度θ变大,第二输出电压vs2变小。此时,第二输出电压vs2为第三阈值vs_th3以上且低于第四阈值vs_th4。在将该第二输出电压vs2输入到选择器部40时,由于第二输出电压vs2为第三阈值vs_th3以上,因此第五比较器45将高电平h的信号输出到第三nand电路53。另外,由于第二输出电压vs2为第四阈值vs_th4以下,因此第六比较器46将高电平h的信号输出到第三nand电路53。由此,第三nand电路53将低电平l的信号输出到and电路60。
106.因而,向and电路60输入的信号为来自第二nand电路52的高电平h的信号和来自第三nand电路53的低电平l的信号。因此,and电路60将低电平l的信号输出到sr锁存电路70的r端子。
107.因此,向sr锁存器的s端子输入的信号为高电平h。另外,向sr锁存电路70的r端子输入的信号为低电平l。因此,sr锁存电路70将低电平l的信号从q拔端子输出到切换部75及旋转角度运算部80。
108.切换部75由于接收来自sr锁存电路70的低电平l的信号,因此将向旋转角度运算部80输出的电压保持为第二输出电压vs2。
109.旋转角度运算部80接收来自sr锁存电路70的低电平l的信号。由此,旋转角度运算部80判定为第二输出电压vs2被施加于旋转角度运算部80。另外,此时,如上所述,由切换部75向旋转角度运算部80施加的电压为第二输出电压vs2。因而,旋转角度运算部80基于第二输出电压vs2计算旋转角度θ。具体而言,旋转角度运算部80通过将k2、v2以及向旋转角度运算部80施加的第二输出电压vs2代入上述关系式(3-2),计算旋转角度θ。
110.通过使旋转体10从初始状态进行旋转,旋转角度θ变得大于θ1且低于θ2。通过旋转角度θ变大,第一输出电压vs1变大。此时,第一输出电压vs1变得大于零且低于第一阈值vs_th1。在将该第一输出电压vs1输入到选择器部40时,由于第一输出电压vs1低于第一阈值vs_th1,因此第一比较器41将低电平l的信号输出到第一nand电路51。另外,由于第一输出电压vs1为第二阈值vs_th2以下,因此第二比较器42将高电平h的信号输出到第一nand电路51。由此,第一nand电路51将高电平h的信号输出到sr锁存电路70的s端子。
111.另外,由于第一输出电压vs1低于第三阈值vs_th3,因此第三比较器43将低电平l的信号输出到第二nand电路52。而且,由于第一输出电压vs1为第四阈值vs_th4以下,因此第四比较器44将高电平h的信号输出到第二nand电路52。由此,第二nand电路52将高电平h的信号输出到and电路60。
112.另外,通过旋转角度θ变大,第二输出电压vs2变小。此时,第二输出电压vs2大于第一阈值vs_th1且低于第三阈值vs_th3。在将该第二输出电压vs2输入到选择器部40时,由于第二输出电压vs2低于第三阈值vs_th3,因此第五比较器45将低电平l的信号输出到第三nand电路53。另外,由于第二输出电压vs2为第四阈值vs_th4以下,因此第六比较器46将高
电平h的信号输出到第三nand电路53。由此,第三nand电路53将高电平h的信号输出到and电路60。
113.因而,向and电路60输入的信号为来自第二nand电路52的高电平h的信号和来自第三nand电路53的高电平h的信号。因此,and电路60将高电平h的信号输出到sr锁存电路70的r端子。
114.因此,向sr锁存器的s端子输入的信号为高电平h。另外,向sr锁存电路70的r端子输入的信号为高电平h。因此,sr锁存电路70将低电平l的信号从q拔端子输出到切换部75及旋转角度运算部80。
115.切换部75由于接收来自sr锁存电路70的低电平l的信号,因此将向旋转角度运算部80输出的电压保持为第二输出电压vs2。
116.旋转角度运算部80接收来自sr锁存电路70的低电平l的信号。由此,旋转角度运算部80判定为第二输出电压vs2被施加于旋转角度运算部80。另外,此时,如上所述,由切换部75向旋转角度运算部80施加的电压为第二输出电压vs2。因而,旋转角度运算部80基于第二输出电压vs2计算旋转角度θ。具体而言,旋转角度运算部80通过将k2、v2以及向旋转角度运算部80施加的第二输出电压vs2代入上述关系式(3-2),计算旋转角度θ。
117.通过使旋转体10从初始状态进行旋转,旋转角度θ变成θ2以上且低于θ3。通过旋转角度θ变大,第一输出电压vs1变大。此时,第一输出电压vs1为第一阈值vs_th1以上且低于第三阈值vs_th3。在将该第一输出电压vs1输入到选择器部40时,由于第一输出电压vs1为第一阈值vs_th1以上,因此第一比较器41将高电平h的信号输出到第一nand电路51。另外,由于第一输出电压vs1为第二阈值vs_th2以下,因此第二比较器42将高电平h的信号输出到第一nand电路51。由此,第一nand电路51将低电平l的信号输出到sr锁存电路70的s端子。
118.另外,由于第一输出电压vs1低于第三阈值vs_th3,因此第三比较器43将低电平l的信号输出到第二nand电路52。而且,由于第一输出电压vs1为第四阈值vs_th4以下,因此第四比较器44将高电平h的信号输出到第二nand电路52。由此,第二nand电路52将高电平h的信号输出到and电路60。
119.另外,通过旋转角度θ变大,第二输出电压vs2变小。此时,第二输出电压vs2为第一阈值vs_th1以下。在将该第二输出电压vs2输入到选择器部40时,由于第二输出电压vs2低于第三阈值vs_th3,因此第五比较器45将低电平l的信号输出到第三nand电路53。另外,由于第二输出电压vs2为第四阈值vs_th4以下,因此第六比较器46将高电平h的信号输出到第三nand电路53。由此,第三nand电路53将高电平h的信号输出到and电路60。
120.因而,向and电路60输入的信号为来自第二nand电路52的高电平h的信号和来自第三nand电路53的高电平h的信号。因此,and电路60将高电平h的信号输出到sr锁存电路70的r端子。
121.因此,向sr锁存器的s端子输入的信号为低电平l。另外,向sr锁存电路70的r端子输入的信号为高电平h。因此,sr锁存电路70将高电平h的信号从q拔端子输出到切换部75及旋转角度运算部80。
122.切换部75由于接收来自sr锁存电路70的高电平h的信号,因此将向旋转角度运算部80输出的电压切换为第一输出电压vs1。
123.旋转角度运算部80接收来自sr锁存电路70的高电平h的信号。由此,旋转角度运算
部80判定为第一输出电压vs1被施加于旋转角度运算部80。另外,此时,如上所述,由切换部75向旋转角度运算部80施加的电压为第一输出电压vs1。因而,旋转角度运算部80基于第一输出电压vs1计算旋转角度θ。具体而言,旋转角度运算部80通过将k1、v1以及向旋转角度运算部80施加的第一输出电压vs1代入上述关系式(3-1),计算旋转角度θ。
124.通过使旋转体10从初始状态进行旋转,旋转角度θ变成θ3以上且180度以下。通过旋转角度θ变大,第一输出电压vs1变大。此时,第一输出电压vs1为第三阈值vs_th3以上且低于第四阈值vs_th4。在将该第一输出电压vs1输入到选择器部40时,由于第一输出电压vs1为第一阈值vs_th1以上,因此第一比较器41将高电平h的信号输出到第一nand电路51。另外,由于第一输出电压vs1为第二阈值vs_th2以下,因此第二比较器42将高电平h的信号输出到第一nand电路51。由此,第一nand电路51将低电平l的信号输出到sr锁存电路70的s端子。
125.另外,由于第一输出电压vs1为第三阈值vs_th3以上,因此第三比较器43将高电平h的信号输出到第二nand电路52。而且,由于第一输出电压vs1为第四阈值vs_th4以下,因此第四比较器44将高电平h的信号输出到第二nand电路52。由此,第二nand电路52将低电平l的信号输出到and电路60。
126.另外,通过旋转角度θ变大,第二输出电压vs2变小。此时,第二输出电压vs2低于第一阈值vs_th1。在将该第二输出电压vs2输入到选择器部40时,由于第二输出电压vs2低于第三阈值vs_th3,因此第五比较器45将低电平l的信号输出到第三nand电路53。另外,由于第二输出电压vs2为第四阈值vs_th4以下,因此第六比较器46将高电平h的信号输出到第三nand电路53。由此,第三nand电路53将高电平h的信号输出到and电路60。
127.因而,向and电路60输入的信号为来自第二nand电路52的低电平l的信号和来自第三nand电路53的高电平h的信号。因此,and电路60将低电平l的信号输出到sr锁存电路70的r端子。
128.因此,向sr锁存器的s端子输入的信号为低电平l。另外,向sr锁存电路70的r端子输入的信号为低电平l。因此,sr锁存电路70保持上次的状态。在此,因为上次的sr锁存电路70的信号为高电平h,所以sr锁存电路70将高电平h的信号从q拔端子输出到切换部75及旋转角度运算部80。
129.切换部75由于接收来自sr锁存电路70的高电平h的信号,因此将向旋转角度运算部80输出的电压保持为第一输出电压vs1。
130.旋转角度运算部80接收来自sr锁存电路70的高电平h的信号。由此,旋转角度运算部80判定为第一输出电压vs1被施加于旋转角度运算部80。另外,此时,如上所述,由切换部75向旋转角度运算部80施加的电压为第一输出电压vs1。因而,旋转角度运算部80基于第一输出电压vs1计算旋转角度θ。具体而言,旋转角度运算部80通过将k1、v1以及向旋转角度运算部80施加的第一输出电压vs1代入上述关系式(3-1),计算旋转角度θ。
131.在此,在旋转角度θ超过180度的情况下,第二输出电压vs2在从零切换为最大值时,作为瞬时值,有时为第一阈值vs_th1以上且低于第三阈值vs_th3。在将该第二输出电压vs2输入到选择器部40时,由于第二输出电压vs2低于第三阈值vs_th3,因此第五比较器45将低电平l的信号输出到第三nand电路53。另外,由于第二输出电压vs2为第四阈值vs_th4以下,因此第六比较器46将高电平h的信号输出到第三nand电路53。由此,第三nand电路53
将高电平h的信号输出到and电路60。
132.另外,在旋转角度θ刚刚超过180度之后,第一输出电压vs1大于第三阈值vs_th3且低于第四阈值vs_th4。因此,与上述同样,来自第二nand电路52的信号为低电平l。
133.因而,向and电路60输入的信号为来自第二nand电路52的低电平l的信号和来自第三nand电路53的高电平h的信号。因此,and电路60将低电平l的信号输出到sr锁存电路70的r端子。
134.因此,向sr锁存器的s端子输入的信号为低电平l。另外,向sr锁存电路70的r端子输入的信号为低电平l。因此,sr锁存电路70保持上次的状态。在此,因为上次的sr锁存电路70的信号为高电平h,所以sr锁存电路70将高电平h的信号从q拔端子输出到切换部75及旋转角度运算部80。
135.切换部75由于接收来自sr锁存电路70的高电平h的信号,因此将向旋转角度运算部80输出的电压保持为第一输出电压vs1。
136.旋转角度运算部80接收来自sr锁存电路70的高电平h的信号。由此,旋转角度运算部80判定为第一输出电压vs1被施加于旋转角度运算部80。另外,此时,如上所述,由切换部75向旋转角度运算部80施加的电压为第一输出电压vs1。因而,旋转角度运算部80基于第一输出电压vs1计算旋转角度θ。具体而言,旋转角度运算部80通过将k1、v1以及向旋转角度运算部80施加的第一输出电压vs1代入上述关系式(3-1),计算旋转角度θ。
137.另外,在旋转角度θ超过180度的情况下,第二输出电压vs2在从零切换为最大值时,作为瞬时值,有时为第三阈值vs_th3以上且第四阈值vs_th4以下。在将该第二输出电压vs2输入到选择器部40时,由于第二输出电压vs2为第三阈值vs_th3以上,因此第五比较器45将高电平h的信号输出到第三nand电路53。另外,由于第二输出电压vs2为第四阈值vs_th4以下,因此第六比较器46将高电平h的信号输出到第三nand电路53。由此,第三nand电路53将低电平l的信号输出到and电路60。
138.另外,在旋转角度θ刚刚超过180度之后,第一输出电压vs1大于第三阈值vs_th3且低于第四阈值vs_th4。因此,与上述同样,来自第二nand电路52的信号为低电平l。
139.因而,向and电路60输入的信号为来自第二nand电路52的低电平l的信号和来自第三nand电路53的低电平l的信号。因此,and电路60将低电平l的信号输出到sr锁存电路70的r端子。
140.因此,向sr锁存器的s端子输入的信号为低电平l。另外,向sr锁存电路70的r端子输入的信号为低电平l。因此,sr锁存电路70保持上次的状态。在此,因为上次的sr锁存电路70的信号为高电平h,所以sr锁存电路70将高电平h的信号从q拔端子输出到切换部75及旋转角度运算部80。
141.切换部75由于接收来自sr锁存电路70的高电平h的信号,因此将向旋转角度运算部80输出的电压保持为第一输出电压vs1。
142.旋转角度运算部80接收来自sr锁存电路70的高电平h的信号。由此,旋转角度运算部80判定为第一输出电压vs1被施加于旋转角度运算部80。另外,此时,如上所述,由切换部75向旋转角度运算部80施加的电压为第一输出电压vs1。因而,旋转角度运算部80基于第一输出电压vs1计算旋转角度θ。具体而言,旋转角度运算部80通过将k1、v1以及向旋转角度运算部80施加的第一输出电压vs1代入上述关系式(3-1),计算旋转角度θ。
143.而且,在旋转角度θ超过180度的情况下,第二输出电压vs2在从零切换为最大值时,作为瞬时值,有时大于第四阈值vs_th4且为第二阈值vs_th2以下。在将该第二输出电压vs2输入到选择器部40时,由于第二输出电压vs2为第三阈值vs_th3以上,因此第五比较器45将高电平h的信号输出到第三nand电路53。另外,由于第二输出电压vs2大于第四阈值vs_th4,因此第六比较器46将低电平l的信号输出到第三nand电路53。由此,第三nand电路53将高电平h的信号输出到and电路60。
144.另外,在旋转角度θ刚刚超过180度之后,第一输出电压vs1大于第三阈值vs_th3且低于第四阈值vs_th4。因此,与上述同样,来自第二nand电路52的信号为低电平l。
145.因而,与上述同样,向and电路60输入的信号为来自第二nand电路52的低电平l的信号和来自第三nand电路53的高电平h的信号。因此,and电路60将低电平l的信号输出到sr锁存电路70的r端子。
146.因此,与上述同样,向sr锁存器的s端子输入的信号为低电平l。另外,向sr锁存电路70的r端子输入的信号为低电平l。因此,sr锁存电路70保持上次的状态。在此,因为上次的sr锁存电路70的信号为高电平h,所以sr锁存电路70将高电平h的信号从q拔端子输出到切换部75及旋转角度运算部80。
147.切换部75由于接收来自sr锁存电路70的高电平h的信号,因此将向旋转角度运算部80输出的电压保持为第一输出电压vs1。
148.旋转角度运算部80接收来自sr锁存电路70的高电平h的信号。由此,旋转角度运算部80判定为第一输出电压vs1被施加于旋转角度运算部80。另外,此时,如上所述,由切换部75向旋转角度运算部80施加的电压为第一输出电压vs1。因而,旋转角度运算部80基于第一输出电压vs1计算旋转角度θ。具体而言,旋转角度运算部80通过将k1、v1以及向旋转角度运算部80施加的第一输出电压vs1代入上述关系式(3-1),计算旋转角度θ。
149.通过使旋转体10从初始状态进行旋转,旋转角度θ变得大于180度且为θ4以下。通过旋转角度θ变大,第一输出电压vs1变大。此时,第一输出电压vs1大于第三阈值vs_th3且为第四阈值vs_th4以下。在将该第一输出电压vs1输入到选择器部40时,由于第一输出电压vs1为第一阈值vs_th1以上,因此第一比较器41将高电平h的信号输出到第一nand电路51。另外,由于第一输出电压vs1为第二阈值vs_th2以下,因此第二比较器42将高电平h的信号输出到第一nand电路51。由此,第一nand电路51将低电平l的信号输出到sr锁存电路70的s端子。
150.另外,由于第一输出电压vs1为第三阈值vs_th3以上,因此第三比较器43将高电平h的信号输出到第二nand电路52。而且,由于第一输出电压vs1为第四阈值vs_th4以下,因此第四比较器44将高电平h的信号输出到第二nand电路52。由此,第二nand电路52将低电平l的信号输出到and电路60。
151.另外,第二输出电压vs2在旋转角度θ刚刚超过180度之后成为最大值。而且,通过旋转角度θ变大,第二输出电压vs2变小。此时,第二输出电压vs2变得大于第二阈值vs_th2。在将该第二输出电压vs2输入到选择器部40时,由于第二输出电压vs2为第三阈值vs_th3以上,因此第五比较器45将高电平h的信号输出到第三nand电路53。另外,由于第二输出电压vs2大于第四阈值vs_th4,因此第六比较器46将低电平l的信号输出到第三nand电路53。由此,第三nand电路53将高电平h的信号输出到and电路60。
152.因而,向and电路60输入的信号为来自第二nand电路52的低电平l的信号和来自第三nand电路53的高电平h的信号。因此,and电路60将低电平l的信号输出到sr锁存电路70的r端子。
153.因此,向sr锁存器的s端子输入的信号为低电平l。另外,向sr锁存电路70的r端子输入的信号为低电平l。因此,sr锁存电路70保持上次的状态。在此,因为上次的sr锁存电路70的信号为高电平h,所以sr锁存电路70将高电平h的信号从q拔端子输出到切换部75及旋转角度运算部80。
154.切换部75由于接收来自sr锁存电路70的高电平h的信号,因此将向旋转角度运算部80输出的电压保持为第一输出电压vs1。
155.旋转角度运算部80接收来自sr锁存电路70的高电平h的信号。由此,旋转角度运算部80判定为第一输出电压vs1被施加于旋转角度运算部80。另外,此时,如上所述,由切换部75向旋转角度运算部80施加的电压为第一输出电压vs1。因而,旋转角度运算部80基于第一输出电压vs1计算旋转角度θ。具体而言,旋转角度运算部80通过将k1、v1以及向旋转角度运算部80施加的第一输出电压vs1代入上述关系式(3-1),计算旋转角度θ。
156.接着,通过使旋转体10从初始状态进行旋转,旋转角度θ变得大于θ4且为θ5以下。通过旋转角度θ变大,第一输出电压vs1变大。此时,第一输出电压vs1大于第四阈值vs_th4且为第二阈值vs_th2以下。在将该第一输出电压vs1输入到选择器部40时,由于第一输出电压vs1为第一阈值vs_th1以上,因此第一比较器41将高电平h的信号输出到第一nand电路51。另外,由于第一输出电压vs1为第二阈值vs_th2以下,因此第二比较器42将高电平h的信号输出到第一nand电路51。由此,第一nand电路51将低电平l的信号输出到sr锁存电路70的s端子。
157.另外,由于第一输出电压vs1为第三阈值vs_th3以上,因此第三比较器43将高电平h的信号输出到第二nand电路52。而且,由于第一输出电压vs1大于第四阈值vs_th4,因此第四比较器44将低电平l的信号输出到第二nand电路52。由此,第二nand电路52将高电平h的信号输出到and电路60。
158.另外,通过旋转角度θ变大,第二输出电压vs2变小。此时,第二输出电压vs2为第二阈值vs_th2以上。在将该第二输出电压vs2输入到选择器部40时,由于第二输出电压vs2为第三阈值vs_th3以上,因此第五比较器45将高电平h的信号输出到第三nand电路53。另外,由于第二输出电压vs2大于第四阈值vs_th4,因此第六比较器46将低电平l的信号输出到第三nand电路53。由此,第三nand电路53将高电平h的信号输出到and电路60。
159.因而,向and电路60输入的信号为来自第二nand电路52的高电平h的信号和来自第三nand电路53的高电平h的信号。因此,and电路60将高电平h的信号输出到sr锁存电路70的r端子。
160.因此,向sr锁存器的s端子输入的信号为低电平l。另外,向sr锁存电路70的r端子输入的信号为高电平h。因此,sr锁存电路70将高电平h的信号从q拔端子输出到切换部75及旋转角度运算部80。
161.切换部75由于接收来自sr锁存电路70的高电平h的信号,因此将向旋转角度运算部80输出的电压保持为第一输出电压vs1。
162.旋转角度运算部80接收来自sr锁存电路70的高电平h的信号。由此,旋转角度运算
部80判定为第一输出电压vs1被施加于旋转角度运算部80。另外,此时,如上所述,由切换部75向旋转角度运算部80施加的电压为第一输出电压vs1。因而,旋转角度运算部80基于第一输出电压vs1计算旋转角度θ。具体而言,旋转角度运算部80通过将k1、v1以及向旋转角度运算部80施加的第一输出电压vs1代入上述关系式(3-1),计算旋转角度θ。
163.通过使旋转体10从初始状态进行旋转,旋转角度θ变得大于θ5且低于θ6。通过旋转角度θ变大,第一输出电压vs1变大。此时,第一输出电压vs1大于第二阈值vs_th2。在将该第一输出电压vs1输入到选择器部40时,由于第一输出电压vs1为第一阈值vs_th1以上,因此第一比较器41将高电平h的信号输出到第一nand电路51。另外,由于第一输出电压vs1大于第二阈值vs_th2,因此第二比较器42将低电平l的信号输出到第一nand电路51。由此,第一nand电路51将高电平h的信号输出到sr锁存电路70的s端子。
164.另外,由于第一输出电压vs1为第三阈值vs_th3以上,因此第三比较器43将高电平h的信号输出到第二nand电路52。而且,由于第一输出电压vs1大于第四阈值vs_th4,因此第四比较器44将低电平l的信号输出到第二nand电路52。由此,第二nand电路52将高电平h的信号输出到and电路60。
165.另外,通过旋转角度θ变大,第二输出电压vs2变小。此时,第二输出电压vs2大于第四阈值vs_th4且低于第二阈值vs_th2。在将该第二输出电压vs2输入到选择器部40时,由于第二输出电压vs2为第三阈值vs_th3以上,因此第五比较器45将高电平h的信号输出到第三nand电路53。另外,由于第二输出电压vs2大于第四阈值vs_th4,因此第六比较器46将低电平l的信号输出到第三nand电路53。由此,第三nand电路53将高电平h的信号输出到and电路60。
166.因而,向and电路60输入的信号为来自第二nand电路52的高电平h的信号和来自第三nand电路53的高电平h的信号。因此,and电路60将高电平h的信号输出到sr锁存电路70的r端子。
167.因此,向sr锁存器的s端子输入的信号为高电平h。另外,向sr锁存电路70的r端子输入的信号为高电平h。因此,sr锁存电路70将低电平l的信号从q拔端子输出到切换部75及旋转角度运算部80。
168.切换部75由于接收来自sr锁存电路70的低电平l的信号,因此将向旋转角度运算部80输出的电压切换为第二输出电压vs2。
169.旋转角度运算部80接收来自sr锁存电路70的低电平l的信号。由此,旋转角度运算部80判定为第二输出电压vs2被施加于旋转角度运算部80。另外,此时,如上所述,由切换部75向旋转角度运算部80施加的电压为第二输出电压vs2。因而,旋转角度运算部80基于第二输出电压vs2计算旋转角度θ。具体而言,旋转角度运算部80通过将k2、v2以及向旋转角度运算部80施加的第二输出电压vs2代入上述关系式(3-2),计算旋转角度θ。
170.通过使旋转体10从初始状态进行旋转,旋转角度θ变成θ6以上且低于360度。通过旋转角度θ变大,第一输出电压vs1变大。此时,第一输出电压vs1大于第二阈值vs_th2。在将该第一输出电压vs1输入到选择器部40时,由于第一输出电压vs1为第一阈值vs_th1以上,因此第一比较器41将高电平h的信号输出到第一nand电路51。另外,由于第一输出电压vs1大于第二阈值vs_th2,因此第二比较器42将低电平l的信号输出到第一nand电路51。由此,第一nand电路51将高电平h的信号输出到sr锁存电路70的s端子。
171.另外,由于第一输出电压vs1为第三阈值vs_th3以上,因此第三比较器43将高电平h的信号输出到第二nand电路52。而且,由于第一输出电压vs1大于第四阈值vs_th4,因此第四比较器44将低电平l的信号输出到第二nand电路52。由此,第二nand电路52将高电平h的信号输出到and电路60。
172.另外,通过旋转角度θ变大,第二输出电压vs2变小。此时,第二输出电压vs2大于第三阈值vs_th3且为第四阈值vs_th4以下。在将该第二输出电压vs2输入到选择器部40时,由于第二输出电压vs2为第三阈值vs_th3以上,因此第五比较器45将高电平h的信号输出到第三nand电路53。另外,由于第二输出电压vs2为第四阈值vs_th4以下,因此第六比较器46将高电平h的信号输出到第三nand电路53。由此,第三nand电路53将低电平l的信号输出到and电路60。
173.因而,向and电路60输入的信号为来自第二nand电路52的高电平h的信号和来自第三nand电路53的低电平l的信号。因此,and电路60将低电平l的信号输出到sr锁存电路70的r端子。
174.因此,向sr锁存器的s端子输入的信号为高电平h。另外,向sr锁存电路70的r端子输入的信号为低电平l。因此,sr锁存电路70将低电平l的信号从q拔端子输出到切换部75及旋转角度运算部80。
175.切换部75由于接收来自sr锁存电路70的低电平l的信号,因此将向旋转角度运算部80输出的电压保持为第二输出电压vs2。
176.旋转角度运算部80接收来自sr锁存电路70的低电平l的信号。由此,旋转角度运算部80判定为第二输出电压vs2被施加于旋转角度运算部80。另外,此时,如上所述,由切换部75向旋转角度运算部80施加的电压为第二输出电压vs2。因而,旋转角度运算部80基于第二输出电压vs2计算旋转角度θ。具体而言,旋转角度运算部80通过将k2、v2以及向旋转角度运算部80施加的第二输出电压vs2代入上述关系式(3-2),计算旋转角度θ。
177.之后,旋转体10通过进行旋转而返回到初始状态,即旋转角度θ变成零。之后,与上述同样,选择器部40选择第一输出电压vs1及第二输出电压vs2中的某一方作为向旋转角度运算部80输出的电压。另外,切换部75基于来自该选择器部40的信号,将向旋转角度运算部80输出的电压切换为第一输出电压vs1及第二输出电压vs2中的某一方。而且,旋转角度运算部80基于来自该选择器部40的信号及向旋转角度运算部80施加的电压,计算旋转角度θ。
178.在此,在旋转角度θ为360度的情况下,第一输出电压vs1在从最大值切换为零时,作为瞬时值,有时大于第四阈值vs_th4且为第二阈值vs_th2以下。在将该第一输出电压vs1输入到选择器部40时,由于第一输出电压vs1为第一阈值vs_th1以上,因此第一比较器41将高电平h的信号输出到第一nand电路51。另外,由于第一输出电压vs1为第二阈值vs_th2以下,因此第二比较器42将高电平h的信号输出到第一nand电路51。由此,第一nand电路51将低电平l的信号输出到sr锁存电路70的s端子。
179.另外,由于第一输出电压vs1为第三阈值vs_th3以上,因此第三比较器43将高电平h的信号输出到第二nand电路52。而且,由于第一输出电压vs1大于第四阈值vs_th4,因此第四比较器44将低电平l的信号输出到第二nand电路52。由此,第二nand电路52将高电平h的信号输出到and电路60。
180.另外,在旋转角度θ为360度附近时,第二输出电压vs2大于第三阈值vs_th3且低于
第四阈值vs_th4。因此,与上述同样,来自第三nand电路53的信号为低电平l。
181.因而,向and电路60输入的信号为来自第二nand电路52的高电平h的信号和来自第三nand电路53的低电平l的信号。因此,and电路60将低电平l的信号输出到sr锁存电路70的r端子。
182.因此,向sr锁存器的s端子输入的信号为低电平l。另外,向sr锁存电路70的r端子输入的信号为低电平l。因此,sr锁存电路70保持上次的状态。在此,因为上次的sr锁存电路70的信号为低电平l,所以sr锁存电路70将低电平l的信号从q拔端子输出到切换部75及旋转角度运算部80。
183.切换部75由于接收来自sr锁存电路70的低电平l的信号,因此将向旋转角度运算部80输出的电压保持为第二输出电压vs2。
184.旋转角度运算部80接收来自sr锁存电路70的低电平l的信号。由此,旋转角度运算部80判定为第二输出电压vs2被施加于旋转角度运算部80。因而,旋转角度运算部80基于第二输出电压vs2计算旋转角度θ。具体而言,旋转角度运算部80通过将k2、v2以及向旋转角度运算部80施加的第二输出电压vs2代入上述关系式(3-2),计算旋转角度θ。
185.另外,在旋转角度θ为360度的情况下,第一输出电压vs1在从最大值切换为零时,作为瞬时值,有时为第三阈值vs_th3以上且第四阈值vs_th4以下。在将该第一输出电压vs1输入到选择器部40时,由于第一输出电压vs1为第一阈值vs_th1以上,因此第一比较器41将高电平h的信号输出到第一nand电路51。另外,由于第一输出电压vs1为第二阈值vs_th2以下,因此第二比较器42将高电平h的信号输出到第一nand电路51。由此,第一nand电路51将低电平l的信号输出到sr锁存电路70的s端子。
186.另外,由于第一输出电压vs1为第三阈值vs_th3以上,因此第三比较器43将高电平h的信号输出到第二nand电路52。而且,由于第一输出电压vs1为第四阈值vs_th4以下,因此第四比较器44将高电平h的信号输出到第二nand电路52。由此,第二nand电路52将低电平l的信号输出到and电路60。
187.另外,在旋转角度θ为360度附近时,第二输出电压vs2大于第三阈值vs_th3且低于第四阈值vs_th4。因此,与上述同样,来自第三nand电路53的信号为低电平l。
188.因而,向and电路60输入的信号为来自第二nand电路52的低电平l的信号和来自第三nand电路53的低电平l的信号。因此,and电路60将低电平l的信号输出到sr锁存电路70的r端子。
189.因此,向sr锁存器的s端子输入的信号为低电平l。另外,向sr锁存电路70的r端子输入的信号为低电平l。因此,sr锁存电路70保持上次的状态。在此,因为上次的sr锁存电路70的信号为低电平l,所以sr锁存电路70将低电平l的信号从q拔端子输出到切换部75及旋转角度运算部80。
190.切换部75由于接收来自sr锁存电路70的低电平l的信号,因此将向旋转角度运算部80输出的电压保持为第二输出电压vs2。
191.旋转角度运算部80接收来自sr锁存电路70的低电平l的信号。由此,旋转角度运算部80判定为第二输出电压vs2被施加于旋转角度运算部80。因而,旋转角度运算部80基于第二输出电压vs2计算旋转角度θ。具体而言,旋转角度运算部80通过将k2、v2以及向旋转角度运算部80施加的第二输出电压vs2代入上述关系式(3-2),计算旋转角度θ。
192.而且,在旋转角度θ为360度的情况下,第一输出电压vs1在从最大值切换为零时,作为瞬时值,有时为第一阈值vs_th1以上且低于第三阈值vs_th3。在将该第一输出电压vs1输入到选择器部40时,由于第一输出电压vs1为第一阈值vs_th1以上,因此第一比较器41将高电平h的信号输出到第一nand电路51。另外,由于第一输出电压vs1为第二阈值vs_th2以下,因此第二比较器42将高电平h的信号输出到第一nand电路51。由此,第一nand电路51将低电平l的信号输出到sr锁存电路70的s端子。
193.另外,由于第一输出电压vs1低于第三阈值vs_th3,因此第三比较器43将低电平l的信号输出到第二nand电路52。而且,由于第一输出电压vs1为第四阈值vs_th4以下,因此第四比较器44将高电平h的信号输出到第二nand电路52。由此,第二nand电路52将高电平h的信号输出到and电路60。
194.另外,在旋转角度θ为360度附近时,第二输出电压vs2大于第三阈值vs_th3且低于第四阈值vs_th4。因此,与上述同样,来自第三nand电路53的信号为低电平l。
195.因而,向and电路60输入的信号为来自第二nand电路52的高电平h的信号和来自第三nand电路53的低电平l的信号。因此,and电路60将低电平l的信号输出到sr锁存电路70的r端子。
196.因此,向sr锁存器的s端子输入的信号为低电平l。另外,向sr锁存电路70的r端子输入的信号为低电平l。因此,sr锁存电路70保持上次的状态。在此,因为上次的sr锁存电路70的信号为低电平l,所以sr锁存电路70将低电平l的信号从q拔端子输出到切换部75及旋转角度运算部80。
197.切换部75由于接收来自sr锁存电路70的低电平l的信号,因此将向旋转角度运算部80输出的电压保持为第二输出电压vs2。
198.旋转角度运算部80接收来自sr锁存电路70的低电平l的信号。由此,旋转角度运算部80判定为第二输出电压vs2被施加于旋转角度运算部80。因而,旋转角度运算部80基于第二输出电压vs2计算旋转角度θ。具体而言,旋转角度运算部80通过将k2、v2以及向旋转角度运算部80施加的第二输出电压vs2代入上述关系式(3-2),计算旋转角度θ。
199.如上所述,在旋转角度检测装置1中,检测旋转角度θ。该旋转角度检测装置1能够不间断地检测旋转角度θ。下面,对不间断地检测旋转角度θ进行说明。
200.在旋转角度检测装置1中,旋转角度检测部30以第一周期输出伴随着旋转体10的旋转角度θ的变大而变大的第一输出电压vs1,该第一周期以旋转角度θ的规定的范围、在此为旋转角度θ为零以上且低于360的范围为一个周期。另外,旋转角度检测部30以第二周期输出伴随着旋转体10的旋转角度θ的变大而变小的第二输出电压vs2,该第二周期以与第一周期不同的旋转角度θ的范围、在此为旋转角度θ大于180度且为540度以下的范围为一个周期。因而,第二输出电压vs2根据旋转角度θ而进行与第一输出电压vs1的变化正负不同的变化。
201.另外,如图9所示,在第一周期的一个周期中的多个旋转角度θ下,第一输出电压vs1的大小和第二输出电压vs2的大小伴随着旋转角度θ的变化而变化。此时,第一阈值vs_th1为与该多个旋转角度θ对应的第一输出电压vs1中的最小值。另外,第一阈值vs_th1为与该多个旋转角度θ对应的第二输出电压vs2中的最小值。而且,第二阈值vs_th2为与该多个旋转角度θ对应的第一输出电压vs1中的最大值。另外,第二阈值vs_th2为与该多个旋转角
度θ对应的第二输出电压vs2中的最大值。而且,如图9所示,在一个周期中将相对于旋转角度θ的第一输出电压vs1绘制而得的线和横跨连续的两个周期将相对于旋转角度θ的第二输出电压vs2绘制而得的线是交叉的,生成两个交点。另外,第一阈值vs_th1为与该交点中的一个对应的电压中的最小值。而且,第二阈值vs_th2为与该交点中的一个对应的电压中的最大值。
202.由此,在第一阈值vs_th1以上且第二阈值vs_th2以下的范围内,从旋转角度检测部30输出的电压是在任意的旋转角度θ下连续且与旋转角度θ为一对一的关系的值。
203.另外,选择器部40选择第一输出电压vs1及第二输出电压vs2中的第一阈值vs_th1以上且第二阈值vs_th2以下的电压。由此,由选择器部40选择的电压是在任意的旋转角度θ下连续且与旋转角度θ为一对一的关系的值。
204.而且,旋转角度运算部80基于由该选择器部40选择的电压,计算旋转角度θ。因而,基于在任意的旋转角度θ下连续且与旋转角度θ为一对一的关系的值计算旋转角度θ,因此旋转角度检测装置1能够不间断地检测旋转角度θ。
205.另外,在旋转角度检测装置1中,还发挥以下说明的效果。
206.在此,在第一输出电压vs1从最大值切换为零时以及第二输出电压vs2从零切换为最大值时中的任一方时,第一输出电压vs1和第二输出电压vs2进行正负相同的变化。在该情况下,第一输出电压vs1的大小和第二输出电压vs2的大小发生变化时的第一输出电压vs1及第二输出电压vs2为第三阈值vs_th3以上且第四阈值vs_th4以下。
207.另外,在旋转角度θ超过180度的情况下,将第二输出电压vs2从零切换为最大值时的相对于旋转角度θ的第二输出电压vs2绘制而得的线与将相对于旋转角度θ的第一输出电压vs1绘制而得的线是交叉的。与该交点对应的电压被设定为第三阈值vs_th3以上且第四阈值vs_th4以下。
208.在此,例如,如图9所示,在旋转角度θ超过180度的情况下,第二输出电压vs2在从零切换为最大值时,作为瞬时值,有时为第一阈值vs_th1以上且第二阈值vs_th2以下。即使在此时,也将选择器部40的选择保持在如上述那样设定的第三阈值vs_th3以上且第四阈值vs_th4以下的范围内,由此使选择器部40适当地选择第一输出电压vs1。由此,抑制选择器部40的误判定。
209.另外,在旋转角度θ为360度的情况下,将第一输出电压vs1从最大值切换为零时的相对于旋转角度θ的第一输出电压vs1绘制而得的线与将相对于旋转角度θ的第二输出电压vs2绘制而得的线是交叉的。与该交点对应的电压被设定为第三阈值vs_th3以上且第四阈值vs_th4以下。
210.在此,例如,在旋转角度θ为360度的情况下,第一输出电压vs1在从最大值切换为零时,作为瞬时值,有时大于第四阈值vs_th4且为第二阈值vs_th2以下。即使在此时,也将选择器部40的选择保持在如上述那样设定的第三阈值vs_th3以上且第四阈值vs_th4以下的范围内,由此使选择器部40适当地选择第二输出电压vs2。由此,抑制选择器部40的误判定。
211.《第二实施方式》
212.在第二实施方式中,选择器部40的形态与第一实施方式有所不同。除此以外,与第一实施方式是相同的。
213.在此,选择器部40以数字电路为主体构成,具备cpu、rom、ram、快闪存储器、i/o以及将这些结构连接的总线等。另外,选择器部40通过执行存储于rom的程序,选择第一输出电压vs1及第二输出电压vs2中的某一方作为向旋转角度运算部80施加的电压。而且,选择器部40将表示该选择了的电压的信号输出到旋转角度运算部80。另外,选择器部40使切换部75向旋转角度运算部80施加该选择了的电压。rom、ram、快闪存储器分别为非过渡性实体存储介质。
214.例如,在从未图示的电源向选择器部40供给电压时,选择器部40执行存储于rom的程序。参照图10的流程图对该选择器部40的处理进行说明。
215.在步骤s100中,选择器部40从第一输出运算电路311获取第一输出电压vs1。另外,选择器部40从第二输出运算电路312获取第二输出电压vs2。
216.接着,在步骤s110中,选择器部40判定通过步骤s100获取的第一输出电压vs1是否为第一阈值vs_th1以上且第二阈值vs_th2以下。在第一输出电压vs1为第一阈值vs_th1以上且第二阈值vs_th2以下时,处理进入步骤s120。另外,在第一输出电压vs1低于第一阈值vs_th1时,处理进入步骤s150。而且,在第一输出电压vs1大于第二阈值vs_th2时,处理进入步骤s150。
217.在继步骤s110之后的步骤s120中,选择器部40判定第二输出电压vs2是否为第一阈值vs_th1以上且第二阈值vs_th2以下。在第二输出电压vs2为第一阈值vs_th1以上且第二阈值vs_th2以下时,处理进入步骤s140。另外,在第二输出电压vs2低于第一阈值vs_th1时,处理进入步骤s130。而且,在第二输出电压vs2大于第二阈值vs_th2时,处理进入步骤s130。
218.在继步骤s120之后的步骤s130中,选择器部40选择第一输出电压vs1作为向旋转角度运算部80施加的电压。具体而言,选择器部40将高电平h的信号输出到切换部75及旋转角度运算部80。
219.切换部75由于接收高电平h的信号,因此将向旋转角度运算部80输出的电压切换为第一输出电压vs1。
220.旋转角度运算部80接收来自选择器部40的高电平h的信号。由此,旋转角度运算部80判定为第一输出电压vs1被施加于旋转角度运算部80。另外,此时,如上所述,由切换部75向旋转角度运算部80施加的电压为第一输出电压vs1。因而,旋转角度运算部80基于第一输出电压vs1计算旋转角度θ。具体而言,旋转角度运算部80通过将k1、v1以及向旋转角度运算部80施加的第一输出电压vs1代入上述关系式(3-1),计算旋转角度θ。之后,处理返回到步骤s100。
221.在继步骤s120之后的步骤s140中,选择器部40维持上次选择了的电压。具体而言,选择器部40通过维持上次的信号电平,将上次的信号电平输出到切换部75及旋转角度运算部80。
222.例如,在来自选择器部40的上次的信号电平为高电平h的情况下,切换部75接收高电平h的信号,因此将向旋转角度运算部80输出的电压保持为第一输出电压vs1。
223.旋转角度运算部80接收来自选择器部40的高电平h的信号。由此,旋转角度运算部80判定为第一输出电压vs1被施加于旋转角度运算部80。另外,此时,如上所述,由切换部75向旋转角度运算部80施加的电压为第一输出电压vs1。因而,旋转角度运算部80基于第一输
出电压vs1计算旋转角度θ。具体而言,旋转角度运算部80通过将k1、v1以及向旋转角度运算部80施加的第一输出电压vs1代入上述关系式(3-1),计算旋转角度θ。之后,处理返回到步骤s100。
224.另外,在来自选择器部40的上次的信号电平为低电平l的情况下,切换部75接收来自选择器部40的低电平l的信号,因此将向旋转角度运算部80输出的电压保持为第二输出电压vs2。
225.旋转角度运算部80接收来自选择器部40的低电平l的信号。由此,旋转角度运算部80判定为第二输出电压vs2被施加于旋转角度运算部80。另外,此时,如上所述,由切换部75向旋转角度运算部80施加的电压为第二输出电压vs2。因而,旋转角度运算部80基于第二输出电压vs2计算旋转角度θ。具体而言,旋转角度运算部80通过将k2、v2以及向旋转角度运算部80施加的第二输出电压vs2代入上述关系式(3-2),计算旋转角度θ。之后,处理返回到步骤s100。
226.此外,在此,与上述同样,在旋转角度θ超过180度的情况下,在第二输出电压vs2从零切换为最大值时,就第二输出电压vs2而言,作为瞬时值,有时为第一阈值vs_th1以上且第二阈值vs_th2以下。在此,选择器部40维持上次的选择作为向旋转角度运算部80施加的电压。具体而言,在旋转角度θ为180度时,第一输出电压vs1为第一阈值vs_th1以上且第二阈值vs_th2以下,并且,第二输出电压vs2为零而低于第一阈值vs_th1。因此,在旋转角度θ为180度时,选择器部40选择第一输出电压vs1。因而,在旋转角度θ超过180度的情况下,在第二输出电压vs2作为瞬时值为第一阈值vs_th1以上且第二阈值vs_th2以下时,选择器部40维持上次的选择即第一输出电压vs1这一选择。由此,即使第二输出电压vs2在从零切换为最大值时变为第一阈值vs_th1以上且第二阈值vs_th2以下,也能够抑制选择器部40的误判定。
227.另外,在旋转角度θ为360度的情况下,在第一输出电压vs1从最大值切换为零时,就第一输出电压vs1而言,作为瞬时值,有时为第一阈值vs_th1以上且第二阈值vs_th2以下。与上述同样,在此,选择器部40维持上次的选择作为向旋转角度运算部80施加的电压。具体而言,在旋转角度θ即将变为360度之前,第二输出电压vs2为第一阈值vs_th1以上且第二阈值vs_th2以下,并且,第一输出电压vs1为最大值而大于第二阈值vs_th2。因此,在旋转角度θ即将变为360度之前,选择器部40选择第二输出电压vs2。因而,在旋转角度θ变为360度的情况下,在第一输出电压vs1作为瞬时值为第一阈值vs_th1以上且第二阈值vs_th2以下时,选择器部40维持上次的选择即第二输出电压vs2这一选择。由此,即使第一输出电压vs1在从最大值切换为零时变为第一阈值vs_th1以上且第二阈值vs_th2以下,也能够抑制选择器部40的误判定。
228.在继步骤s110之后的步骤s150中,第二输出电压vs2为第一阈值vs_th1以上且第二阈值vs_th2以下。因此,选择器部40选择第二输出电压vs2作为向旋转角度运算部80施加的电压。具体而言,选择器部40将低电平l的信号输出到切换部75及旋转角度运算部80。
229.切换部75由于接收来自选择器部40的低电平l的信号,因此将向旋转角度运算部80输出的电压切换为第二输出电压vs2。
230.旋转角度运算部80接收来自选择器部40的低电平l的信号。由此,旋转角度运算部80判定为第二输出电压vs2被施加于旋转角度运算部80。另外,此时,如上所述,由切换部75
向旋转角度运算部80施加的电压为第二输出电压vs2。因而,旋转角度运算部80基于第二输出电压vs2计算旋转角度θ。具体而言,旋转角度运算部80通过将k2、v2以及向旋转角度运算部80施加的第二输出电压vs2代入上述关系式(3-2),计算旋转角度θ。之后,处理返回到步骤s100。
231.如此,进行选择器部40的处理。在该第二实施方式中,也发挥与第一实施方式同样的效果。
232.《第三实施方式》
233.在第三实施方式中,第一输出运算电路311进行的第一输出电压vs1的计算以及第二输出运算电路312进行的第二输出电压vs2的计算与第一实施方式有所不同。除此以外,与第一实施方式是相同的。
234.第一输出运算电路311如以下关系式(4-1)所示那样,基于第一x方向磁通φx1、第一y方向磁通φy1及旋转角度θ,计算第一输出电压vs1。在关系式(4-1)中,k3为与旋转角度θ相关的系数。另外,将k3被设定为正值。而且,k3的绝对值大于上述k1的绝对值。另外,v3为常数。v3被设定为:在旋转角度θ为θt1时,第一输出电压vs1为零。θt1及θt2为与旋转角度θ相关的任意常数。例如,θt1被设定为60度。θt2被设定为300度。n为零以上的整数。
235.vs1=k3
×
arctan(φy1/φx1) v3
236.=k3
×
θ v3
237.(θt1 360
×
n≤θ<θt2 360
×
n时)
238.vs1=0
239.(360
×
n≤θ<θt1 360
×
n、
240.θt2 360
×
n≤θ<360
×
(n 1)中的某一方时)
241.…
(4-1)
242.因而,在此,如图11所示,在旋转角度θ为零度以上且低于60度时,第一输出电压vs1为零。另外,在旋转角度θ为60度以上且低于300度时,第一输出电压vs1伴随着旋转角度θ的变大而变大。而且,在旋转角度θ即将变为300度之前,第一输出电压vs1变为最大值。另外,在旋转角度θ为300度时,第一输出电压vs1返回到零。而且,在旋转角度θ大于300度且低于360度时,第一输出电压vs1为零。
243.这样,第一输出运算电路311计算第一输出电压vs1。
244.另外,同样,第二输出运算电路312如以下关系式(4-2)所示那样,基于第二x方向磁通φx2、第二y方向磁通φy2及旋转角度θ,计算第二输出电压vs2。在关系式(4-2)中,k4为与旋转角度θ相关的系数。另外,k4被设定为正负与k3的正负不同。因此,k4被设定为负值。而且,k4的绝对值被设定为大于k2的绝对值且与k3的绝对值相同的值。另外,v4为常数。而且,v4被设定为:在旋转角度θ为θt3时,第二输出电压vs2为零。θt3及θt4为与旋转角度θ相关的任意常数。例如,θt3被设定为120度。另外,θt4被设定为240度。
245.vs2=k4
×
arctan(φy2/φx2) v4
246.=k4
×
θ v4
247.(360
×
n≤θ<θt3 360
×
n、
248.θt4 360
×
n≤θ<360
×
(n 1)中的某一方时)
249.vs2=0
250.(θt3 360
×
n≤<θt4 360
×
n时)
251.…
(4-2)
252.因而,在此,在旋转角度θ为零以上且低于120度时,第二输出电压vs2伴随着旋转角度θ的变大而变小。另外,在旋转角度θ为120度以上且低于240度时,第二输出电压vs2为零。而且,在旋转角度θ为240度时,第二输出电压vs2为最大值。另外,在旋转角度θ大于240度且低于360度时,第二输出电压vs2伴随着旋转角度θ的变大而变小。
253.另外,第一阈值vs_th1被调整为与将相对于旋转角度θ的第一输出电压vs1绘制而得的线和将相对于旋转角度θ的第二输出电压vs2绘制而得的线的交点对应的电压中的最小值。同样,第二阈值vs_th2被调整为与将相对于旋转角度θ的第一输出电压vs1绘制而得的线和将相对于旋转角度θ的第二输出电压vs2绘制而得的线的交点对应的电压中的最大值。
254.这样,第二输出运算电路312计算第二输出电压vs2。
255.如上,在第三实施方式中,计算第一输出电压vs1及第二输出电压vs2。在该第三实施方式中,也发挥与第一实施方式同样的效果。
256.《第四实施方式》
257.在第四实施方式中,第二输出运算电路312进行的第二输出电压vs2的计算与第一实施方式有所不同。除此以外,与第一实施方式是相同的。
258.第二输出运算电路312如以下关系式(5)所示那样,基于第二x方向磁通φx2、第二y方向磁通φy2及旋转角度θ,计算第二输出电压vs2。在关系式(5)中,k5为与旋转角度θ相关的系数。另外,k5被设定为正负与k1的正负不同。因此,k5被设定为负值。而且,k5的绝对值被设定为与k1的绝对值不同的值。例如,k5的绝对值大于k1的绝对值。另外,v5为常数。v5被设定为:在旋转角度θ为θt5时,第二输出电压vs2为零。θt5及θt6为与旋转角度θ相关的任意常数。例如,在此,θt5被设定为120度。θt6被设定为330度。
259.vs2=k5
×
arctan(φy2/φx2) v5
260.=k5
×
θ v5
261.(360
×
n≤θ<θt5 360
×
n、
262.θt6 360
×
n≤θ<360
×
(n 1)中的某一方时)
263.vs2=0
264.(θt5 360
×
n≤θ<θt6 360
×
n时)
265.…
(5)
266.因而,在此,如图12所示,在旋转角度θ为零以上且低于120度时,第二输出电压vs2伴随着旋转角度θ的变大而变小。另外,在旋转角度θ为120度以上且低于330度时,第二输出电压vs2为零。而且,在旋转角度θ为330度时,第二输出电压vs2为最大值。另外,在旋转角度θ大于330度且低于360度时,第二输出电压vs2伴随着旋转角度θ的变大而变小。
267.这样,第二输出运算电路312计算第二输出电压vs2。
268.如第四实施方式,即使第一输出电压vs1相对于旋转角度θ的变化量的绝对值与第二输出电压vs2相对于旋转角度θ的变化量的绝对值不同,也发挥与第一实施方式同样的效果。
269.《第五实施方式》
270.在第五实施方式中,旋转角度检测部30、选择器部40及切换部75的形态有所不同。除此以外,与第一实施方式是相同的。
271.如图13所示,旋转角度检测部30仅具有一个传感器33。如图13及图14所示,该传感器33除了上述的第一霍尔元件301、第二霍尔元件302、第一电源端子321及第一接地端子331以外,还包含第一输出端子341、选择器端子351及输出运算电路313。
272.第一输出端子341与后述的切换部75连接。另外,第一输出端子341向旋转角度运算部80输出来自切换部75的电压。
273.选择器端子351与后述的选择器部40连接。另外,第一输出端子341将表示由选择器部40选择的电压的信号输出到旋转角度运算部80。
274.与第一实施方式相同,输出运算电路313使用上述关系式(3-1),基于第一x方向磁通φx1及第一y方向磁通φy1,计算第一输出电压vs1。另外,与第一实施方式相同,输出运算电路313使用上述关系式(3-2),基于第一x方向磁通φx1及第一y方向磁通φy1,计算第二输出电压vs2。而且,输出运算电路313向选择器部40及切换部75输出该计算出的第一输出电压vs1及第二输出电压vs2。
275.与第一实施方式相同,选择器部40选择第一输出电压vs1及第二输出电压vs2中的某一方作为向旋转角度运算部80施加的电压。另外,选择器部40将表示该选择了的电压的信号输出到旋转角度运算部80。而且,选择器部40使切换部75向旋转角度运算部80施加该选择了的电压。另外,在此,选择器部40与旋转角度检测部30为一体。
276.与上述相同,切换部75基于来自选择器部40的sr锁存电路70的q拔端子的信号,将向旋转角度运算部80输出的电压切换为第一输出电压vs1及第二输出电压vs2中的某一方。另外,在此,切换部75与旋转角度检测部30为一体。
277.这样,构成了第五实施方式。在该第五实施方式中,也发挥与第一实施方式同样的效果。另外,在第五实施方式中,因为旋转角度检测部30、选择器部40及切换部75为一体,所以旋转角度检测装置1的结构比较简单。
278.《第六实施方式》
279.在第六实施方式中,磁场产生部20及旋转角度检测部30的形态有所不同。除此以外,与第一实施方式是相同的。
280.如图15所示,磁场产生部20具有磁铁213。磁铁213与旋转体10的一端面101连接。由此,磁铁213与旋转体10一同进行旋转。另外,例如,磁铁213中的y方向的一侧被磁化为n极。而且,磁铁213中的y方向的另一侧被磁化为s极。由此,在旋转体10的周边产生磁场。此外,磁铁213的被磁化的方向也可以与上述的方向为相反方向。
281.旋转角度检测部30具有第一传感器31及第二传感器32。
282.第一传感器31具有第一mr元件361及第二mr元件362来代替第一霍尔元件301及第二霍尔元件302。第一mr元件361通过将磁铁213的与旋转相伴的磁场的变化转换为电阻,将与沿x方向流通的磁通相应的信号输出到第一输出运算电路311。第二mr元件362通过将磁铁213的与旋转相伴的磁场的变化转换为电阻,将与沿x方向流通的磁通相应的信号输出到第一输出运算电路311。此外,mr为magneto resistive(磁阻)的缩写。
283.第二传感器32具有第三mr元件363及第四mr元件364来代替第三霍尔元件303及第四霍尔元件304。第三mr元件363通过将磁铁213的与旋转相伴的磁场的变化转换为电阻,将
与沿x方向流通的磁通相应的信号输出到第三输出运算电路。第四mr元件364通过将磁铁213的与旋转相伴的磁场的变化转换为电阻,将与沿x方向流通的磁通相应的信号输出到第四输出运算电路。
284.这样,构成了第六实施方式。在该第六实施方式中,也发挥与第一实施方式同样的效果。
285.《第七实施方式》
286.在第七实施方式中,不具备磁场产生部20,且旋转角度检测部30的形态有所不同。除此以外,与第一实施方式是相同的。
287.如图16所示,旋转角度检测部30具有第一传感器31及第二传感器32。
288.第一传感器31为电感式传感器,包含第一基板371、第一高频发送部381、第一检测线圈391及第一输出运算电路311。第一基板371为印刷基板,在第一基板371上配置有第一电源端子321、第一接地端子331、第一输出端子341、第一检测线圈391、第一高频发送部381及第一输出运算电路311。第一高频发送部381将数mhz的高频信号发送到第一检测线圈391。通过该高频信号,第一检测线圈391产生高频磁通。在此,旋转体10由金属形成,通过该高频磁通,在旋转体10的一端面101产生涡电流。另外,通过旋转体10的旋转,该涡电流的大小发生变化。由此,第一检测线圈391的阻抗发生变化。基于该第一检测线圈391的阻抗的变化,第一输出运算电路311输出与旋转体10的旋转角度θ对应的第一输出电压vs1。
289.与第一传感器31相同,第二传感器32为电感式传感器,包含第二基板372、第二高频发送部382、第二检测线圈392及第二输出运算电路312。由此,与上述相同,第二输出运算电路312基于第二检测线圈392的阻抗的变化,输出与旋转体10的旋转角度θ对应的第二输出电压vs2。
290.这样,构成了第七实施方式。在该第七实施方式中,也发挥与第一实施方式同样的效果。
291.《第八实施方式》
292.在第八实施方式中,不具备磁场产生部20,且旋转角度检测部30的形态有所不同。除此以外,与第一实施方式是相同的。
293.如图17所示,旋转角度检测部30具有第一传感器31及第二传感器32。
294.第一传感器31为电位差计,包含第一基板371、第一电阻体401、第一接触部411及第一输出运算电路311。第一基板371为印刷基板,在第一基板371上配置有第一电阻体401。第一电阻体401例如由碳形成,沿着旋转体10的旋转方向延伸。第一接触部411与旋转体10的一端面101连接。因此,第一接触部411与旋转体10一同进行旋转。另外,通过使第一接触部411与旋转体10一同进行旋转,第一接触部411和第一电阻体401的接触位置发生变化。由此,第一电阻体401的测定电阻发生变化。第一输出运算电路311基于该第一电阻体401的测定电阻的变化,输出与旋转体10的旋转角度θ对应的第一输出电压vs1。
295.与第一传感器31相同,第二传感器32为电位差计,包含第二基板372、第二电阻体402、第二接触部412及第二输出运算电路312。与第一传感器31相同,第二输出运算电路312基于第二电阻体402的测定电阻的变化,输出与旋转体10的旋转角度θ对应的第二输出电压vs2。
296.这样,构成了第八实施方式。在该第八实施方式中,也发挥与第一实施方式同样的
效果。
297.《其他实施方式》
298.本公不限定于上述实施方式,可以对上述实施方式适当进行变更。另外,在上述各实施方式中,除了特别明示为必需的情况以及在原理上认为明显必需的情况等以外,构成实施方式的要素当然未必是必需的。
299.本公开所记载的运算部等及其方法也可以通过以下的专用计算机实现:其是通过构成以执行用计算机程序具体化的一个或多个功能的方式编程的处理器及存储器而提供的。或者,本公开所记载的运算部等及其方法也可以通过以下的专用计算机实现:其是通过利用一个以上的专用硬件逻辑电路构成处理器而提供的。或者,本公开所记载的运算部等及其方法也可以通过以下的一个以上的专用计算机实现:其是通过以执行一个或多个功能的方式编程的处理器及存储器和包含一个以上的硬件逻辑电路的处理器的组合构成的。另外,计算机程序也可以作为由计算机执行的指令而存储于计算机可读非过渡有形记录介质。
300.在上述实施方式中,v2例如被设定为:在旋转角度θ为180度时,第二输出电压vs2为零。v2并不限定于这样设定,例如,v2也可以被设定为:在旋转角度θ为180度时,第二输出电压vs2为最大值即5v。
301.在上述实施方式中,如图7所示,在一个周期中将相对于旋转角度θ的第一输出电压vs1绘制而得的线和横跨连续的两个周期将相对于旋转角度θ的第二输出电压vs2绘制而得的线是交叉的,生成两个交点。与此相对,如图18所示,也可以如下:在一个周期中将相对于旋转角度θ的第一输出电压vs1绘制而得的线和横跨多个周期将相对于旋转角度θ的第二输出电压vs2绘制而得的线是交叉的,生成多个交点。在该情况下,与该交点中的一个对应的电压中的最小值为第一阈值vs_th1。而且,与该交点中的一个对应的电压中的最大值为第二阈值vs_th2。由此,在第一阈值vs_th1以上且第二阈值vs_th2以下的范围内,从旋转角度检测部30输出的电压为在任意的旋转角度θ下连续的值。
302.另外,也可以如下:在一个周期中将相对于旋转角度θ的第二输出电压vs2绘制而得的线和横跨多个周期将相对于旋转角度θ的第一输出电压vs1绘制而得的线是交叉的,由此生成多个交点。在该情况下,与该交点中的一个对应的电压中的最小值也为第一阈值vs_th1。而且,与该交点中的一个对应的电压中的最大值为第二阈值vs_th2。由此,在第一阈值vs_th1以上且第二阈值vs_th2以下的范围内,从旋转角度检测部30输出的电压为在任意的旋转角度θ下连续的值。
303.在上述实施方式中,第三阈值vs_th3被设定为比第一阈值vs_th1大且比后述的第四阈值vs_th4小的电压。另外,第四阈值vs_th4被设定为比第三阈值vs_th3大且比第二阈值vs_th2小的电压。与此相对,第三阈值vs_th3也可以被设定为与第一阈值vs_th1相同的电压。另外,第四阈值vs_th4也可以被设定为与第二阈值vs_th2相同的电压。有时也使第三阈值vs_th3和第一阈值vs_th1被设定为相同电压且使第四阈值vs_th4和第二阈值vs_th2被设定为相同电压。在该情况下,例如,如图19所示,以模拟电路为主体构成的选择器部40具有or电路65来代替and电路60。
304.另外,也可以将上述实施方式适当地组合。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。