一种基于磁钉的v2x路口优先方法
技术领域
1.本发明涉及一种基于磁钉的v2x路口优先方法。
背景技术:
2.数字轨道是一种电子导向胶轮虚拟轨道技术,采用地面埋设磁源(通常为磁钉)为定位参考,通过编码及数字化后构成的虚拟轨道,是物理钢轨轨道的虚拟化和数字化替代,约束车辆沿磁源构成的线路自主导向行驶,无需人工控制车辆的方向,大大降低轨道交通司机的工作强度。磁钉的南北极构成二进制码元,连续的一组磁钉可通过极性的不同排列传递特定的信息码,典型的信息包括道路标界、道路的设计参数(如道路曲率半径),以及与运行相关的信息(如前方道路分岔或并道以及车站位置等)。经过改装后的数字轨道车辆在经过包含编码的磁钉道路段时,通过安装于车辆底部的轨道传感器检测路面磁钉的极性编码序列,并经过车辆上安装的控制导航定位处理器(ncu)解码,即可获得上述参数和信息。
3.当数字轨道车辆行驶在预先埋设好磁钉数字轨道的路面上,车辆上的控制导航定位处理器通过与车辆的中央控制器的接口,实时获取电车的车速、故障信息等;控制导航定位处理器通过与轨道传感器的接口,获取磁钉编码,并且可以将磁钉编码解析成对应的gps坐标信息;控制导航定位处理器通过与调度平台(ats)的接口,实时获取车辆线路相关的信息包括目的地站点编号、下一站站点编号等调度信息;此外,控制导航定位处理器还可以将自身接收到的所有信息反应在车载dmi显示屏上,方便司机日常操作,同时也方便维护人员对数字轨道系统的维护。
4.数字轨道交通系统是一种新型、大容量、高效率的自动化公共交通运输系统。系统以普通公交车或胶轮车辆的形式在虚拟轨道地面自动运行,实现接近轨道交通对运量、运行速度、发车频次、和运行精准性的要求。数字轨道车辆作为一种运行于地面的中运量公共交通方式,与有轨电车和brt快速公交一样,数字轨道车辆一般享有专有路权,并且需要得到一定的交通信号优先来保证运行速度和服务水平。
5.传统有轨电车的定位信息采集,一般采用信标的方式,存在施工复杂、后期维护不便的问题。快速公交brt的位置采集传统的方式是在地下埋设线圈或者是在路口立杆安装rfid读卡器,但是这两种方式都存在可靠性不高,位置信息不连续的问题。
6.新兴的智能网联(c-v2x)车路协同技术在无线通信技术的基础上针对高速、低延时、高可靠的要求,开发了一套全新的通信协议和空中接口技术,来保证网络的可靠连接和数据交互。这种v2x技术在实际使用上有两个问题,第一路口信号机影响到整个交通网络,一般交警不允许v2x设备主动控制交通信号机;第二obu内置的gps检测器精度不够高,所计算的车辆到达交叉路口的时间不够准确,而如果使用高精度定位rtk技术需要通过4g/5g进行无线通信获取车辆位置,所提供的接入延时和稳定性也达不到实时性的要求。
技术实现要素:
7.本发明的目的是克服现有技术的缺陷,提供一种基于磁钉的v2x路口优先方法,数
字轨道交通系统融合智能网联(c-v2x)车路协同技术,使得数字轨道车辆拥有与路侧设备通信的能力,帮助数字轨道电车减少路口停车时间,以最短时间完成首末站行程,提高通行效率,达到路口信号优先的目的。
8.实现上述目的的技术方案是:一种基于磁钉的v2x路口优先方法,包括以下步骤:
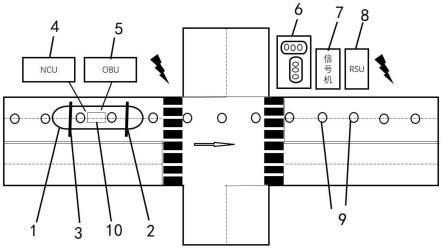
9.s1,构建硬件设备架构:所述硬件设备架构包括控制导航定位处理器ncu、车载单元obu、路侧单元rsu、信号优先主机、信号机和调度平台ats;所述控制导航定位处理器ncu和车载单元obu分别安装在车辆的车体上,所述车辆沿磁钉轨道运行,所述车辆采用数字轨道电车;所述控制导航定位处理器ncu和车载单元obu通过有线网络通信;所述路侧单元rsu、信号优先主机和信号机分别安装在路侧,所述路侧单元rsu通过有线网络与所述信号优先主机进行信息交互,所述路侧单元rsu通过其内插入的物联网卡与所述调度平台进行信息交互,所述路侧单元rsu通过无线pc5接口与所述车载单元obu通信;所述信号优先主机与所述信号机通信;
10.s2,所述控制导航定位处理器ncu读取磁钉轨道上的磁钉编号,实现车辆自身数据的采集,计算车辆距离路口的实时距离,并将采集的车辆信息发送给所述车载单元obu;同时所述控制导航定位处理器ncu发送优先请求信息给所述车载单元obu;
11.s3,所述车载单元obu获取来自所述控制导航定位处理器ncu的车辆信息,并接收来自所述路侧单元rsu广播的数据包,使得车辆具备v2x通信能力;所述车载单元obu将接收的车辆信息和优先请求信息发送给所述路侧单元rsu;
12.s4,所述路侧单元rsu将接收的车辆信息和优先请求信息,发送给所述信号优先主机;
13.s5,所述信号优先主机接收来自路侧单元rsu的车辆信息和优先请求信息,通过当前车辆位置与行驶速度及实时路况信息计算出车辆到达交叉路口的时间,同时结合当前红绿灯的相位和车辆通过路口需要的绿灯相位计算出对应的优先策略,并将优先策略发送给所述信号机;
14.s6,所述信号机接收来自所述信号优先主机的优先策略,并根据所接收的优先策略改变信号机配时,进行控灯,减少车辆在路口等待时间,尽可能地保证车辆以绿灯相位通过路口;所述信号机将信号机实时信息反馈给所述信号优先主机;
15.s7,所述信号优先主机将接收的信号机实时信息优先回复给所述路侧单元rsu;
16.s8,所述路侧单元rsu将信号机实时信息反馈给所述车载单元obu,并上传给所述调度平台;
17.s9,所述调度平台接收所述路侧单元rsu上传的信号机实时信息;所述车载单元obu将信号机实时信息发送给所述控制导航定位处理器ncu。
18.上述的一种基于磁钉的v2x路口优先方法,步骤s5中,所述优先策略包括绿灯延长、红灯截断、相位插入和不做处理。
19.上述的一种基于磁钉的v2x路口优先方法,步骤s2中,所述控制导航定位处理器ncu发送给车载单元obu的优先请求信息为交叉路口优先通行请求,该优先请求信息中包含信号优先请求标志和车辆离路口距离。
20.上述的一种基于磁钉的v2x路口优先方法,所述信号优先请求标志和车辆离路口距离的确定方法,包括以下步骤:
21.s21,根据磁钉轨道设计平面图中标注的磁钉和桩号,将每颗磁钉进行编号,并在表格中分两列分别列出磁钉编号以及其对应的桩号;
22.s22,在表格上增加一列为信号优先请求标志,增加一列为车辆离路口距离;
23.s23,确定各停车线和停车线延伸线所在的桩号,从车辆行驶方向的停车线延伸线开始到最近的停车线的桩号对应的信号优先请求标志为1;从该停车线到下一个停车线延伸线的桩号对应的信号优先请求标志为2;从该停车线延伸线开始10米内的桩号对应的信号优先请求标志为3;从该停车线延伸线开始超过10米后到下一个停车线的桩号对应的信号优先请求标志为1;依次填写信号优先请求标志直到所有桩号对应的信号优先请求标志都填写完成;
24.s24,从停车线开始到车辆行驶方向相反方向的最近的停车线延伸线所对应的桩号,车辆离路口距离从0开始递增到最大值;从停车线延伸线开始到车辆行驶方向相反方向的最近的停车线所对应的桩号车辆离路口距离从0开始递增到最大值。
25.本发明的基于磁钉的v2x路口优先方法,数字轨道交通系统融合智能网联(c-v2x)车路协同技术,使得数字轨道车辆拥有与路通信的能力,帮助数字轨道电车减少路口停车时间,以最短时间完成首末站行程,提高通行效率,达到路口信号优先的目的。
附图说明
26.图1为本发明的基于磁钉的v2x路口优先方法的硬件设备架构的通信数据流示意图;
27.图2为车辆通过路口时的示意图;
28.图3为信号优先请求标志和车辆离路口距离确定步骤中的表格示意图;
29.图4为磁钉轨道设计平面cad图。
具体实施方式
30.为了使本技术领域的技术人员能更好地理解本发明的技术方案,下面结合附图对其具体实施方式进行详细地说明:
31.请参阅图1、图2、图3和图4,本发明的最佳实施例,一种基于磁钉的v2x路口优先方法,包括以下步骤:
32.s1,构建硬件设备架构:硬件设备架构包括控制导航定位处理器ncu、车载单元obu、路侧单元rsu、信号优先主机101、信号机102和调度平台ats;控制导航定位处理器ncu和车载单元obu分别安装在车辆的车体上,车辆沿磁钉轨道运行,车辆采用数字轨道电车;控制导航定位处理器ncu和车载单元obu通过有线网络通信;路侧单元rsu、信号优先主机101和信号机102分别安装在路侧,路侧单元rsu通过有线网络与信号优先主机101进行信息交互,路侧单元rsu通过其内插入的物联网卡与调度平台ats进行信息交互,路侧单元rsu通过无线pc5接口与车载单元obu通信;信号优先主机101与信号机102通信;路侧单元rsu内的物联网卡可以采用4g/5g卡。
33.s2,控制导航定位处理器ncu读取磁钉轨道上的磁钉编号,实现车辆自身数据的采集,计算车辆距离路口的实时距离,并将采集的车辆信息发送给车载单元obu;同时控制导航定位处理器ncu发送优先请求信息给车载单元obu;
34.s3,车载单元obu获取来自控制导航定位处理器ncu的车辆信息,并接收来自路侧单元rsu广播的数据包,使得车辆具备v2x通信能力;车载单元obu将接收的车辆信息和优先请求信息发送给路侧单元rsu;
35.s4,路侧单元rsu将接收的车辆信息和优先请求信息,发送给信号优先主机101;
36.s5,信号优先主机101接收来自路侧单元rsu的车辆信息和优先请求信息,通过当前车辆位置与行驶速度及实时路况信息计算出车辆到达交叉路口的时间,同时结合当前红绿灯的相位和车辆通过路口需要的绿灯相位计算出对应的优先策略,并将优先策略发送给信号机102;优先策略包括绿灯延长、红灯截断、相位插入和不做处理中的一种。
37.s6,信号机102接收来自信号优先主机101的优先策略,并根据所接收的优先策略改变信号机配时,进行控灯,减少车辆在路口等待时间,尽可能地保证车辆以绿灯相位通过路口;信号机102将信号机实时信息(实时配时信息)反馈给信号优先主机101;
38.s7,信号优先主机101将接收的信号机实时信息优先回复给路侧单元rsu;
39.s8,路侧单元rsu将信号机实时信息反馈给车载单元obu,并上传给调度平台ats;
40.s9,调度平台ats接收路侧单元rsu上传的信号机实时信息;车载单元obu将信号机实时信息发送给控制导航定位处理器ncu。
41.请参阅图2,步骤s2中,控制导航定位处理器ncu发送给车载单元obu的优先请求信息为交叉路口优先通行请求,该优先请求信息中包含信号优先请求标志和车辆离路口距离。信号优先请求标志的定义:1表示接近路口,2表示进入路口,3表示离开路口。根据以上定义,如图2所示,车辆1的请求标志为1,车辆2的请求标志为2,车辆3的请求标志为3。
42.车辆离路口距离的定义:如果请求标志为1或者3,车头到最近的停车线的距离;如果请求标志为2,车头到最近的停车线延伸线的距离。根据以上定义,如图2所示,车辆1、车辆2、车辆3的离路口距离在图中表示。
43.请参阅图3和图4,信号优先请求标志和车辆离路口距离的确定方法,包括以下步骤:
44.s21,控制导航定位处理器ncu根据磁钉轨道设计平面图中标注的磁钉和桩号,将每颗磁钉进行编号,并在表格中分两列分别列出磁钉编号以及其对应的桩号;
45.s22,在表格上增加一列为信号优先请求标志,增加一列为车辆离路口距离;
46.s23,确定各停车线和停车线延伸线所在的桩号,从车辆行驶方向的停车线延伸线开始到最近的停车线的桩号对应的信号优先请求标志为1;从该停车线到下一个停车线延伸线的桩号对应的信号优先请求标志为2;从该停车线延伸线开始10米内的桩号对应的信号优先请求标志为3;从该停车线延伸线开始超过10米后到下一个停车线的桩号对应的信号优先请求标志为1;依次填写信号优先请求标志直到所有桩号对应的信号优先请求标志都填写完成;
47.s24,从停车线开始到车辆行驶方向相反方向的最近的停车线延伸线所对应的桩号,车辆离路口距离从0开始递增到最大值;从停车线延伸线开始到车辆行驶方向相反方向的最近的停车线所对应的桩号车辆离路口距离从0开始递增到最大值。
48.基于v2x技术的信号优先功能可以实现特殊车辆(公交车、紧急车辆、vip车辆)与红绿灯之间的双向通信、位置速度高精度检测。当特殊车辆行驶至交叉路口区域附近时,通过车载设备与路侧设备相互通讯,并自动发送交叉路口优先通行请求,路侧设备中内置的
算法通过当前车辆位置与行驶速度及实时路况信息计算出车辆到达交叉路口的时间,同时结合当前红绿灯的相位、车辆通过路口需要的绿灯相位来决定采用绿灯延长、红灯截断、相位插入、不做处理四种处理机制中的一种。通过上述的公交优先机制确保特殊车辆能够以绿灯相位通过路口,减少了车辆在路口的等待时间。
49.本发明的基于磁钉的v2x路口优先方法,数字轨道车辆上的控制导航定位处理器ncu读取磁钉编号,计算车辆距离路口的实时距离,并且获取车辆的实时故障信息,满载率等。数字轨道车辆控制导航定位处理器(ncu)与v2x技术中的车载单元obu通过网线的连接进行信息交互,车载单元obu与路侧单元rsu通过pc5进行无线信息交互,路侧单元rsu与信号优先主机通过网线的连接进行信息交互。信号优先主机通过接收到的车辆离停车线的实时距离、车速、车辆的实时故障信息,满载率,车辆是否进站,以及信号机的当前控制状态综合计算出控制策略,将策略发送给信号机进行控灯,减少了车辆在路口的等待时间。
50.综上所述,本发明的基于磁钉的v2x路口优先方法,数字轨道交通系统融合智能网联(c-v2x)车路协同技术,使得数字轨道车辆拥有与路通信的能力,帮助数字轨道电车减少路口停车时间,以最短时间完成首末站行程,提高通行效率,达到路口信号优先的目的。
51.本技术领域中的普通技术人员应当认识到,以上的实施例仅是用来说明本发明,而并非用作为对本发明的限定,只要在本发明的实质精神范围内,对以上所述实施例的变化、变型都将落在本发明的权利要求书范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。