1.本发明涉及材料测试和分析技术领域,具体涉及基于光学手段的古琴表面材料破损检测识别方法。
背景技术:
2.古琴是一种古老的中国传统乐器,是由一块呈较长的瓦弧形面板和一块梯形地板组成,而古琴在生产过程中或者使用过程中可能会由于外力导致古琴表面出现异常现象,进而可能会影响古琴的音色、音质等,例如古琴表面出现破损现象。
3.现有的古琴表面材料破损或者表面异常检测识别的方法一般是基于人工的方式,这种基于人工的方式一般是依靠制琴师或者使用者通过音律调试和型质观测得到的,这种检测方法受人工主观影响较大、检测效率也较低,检测的准确率也无法保证,并且难以检测出一些细小的破损或异常,因此基于人工对古琴表面材料破损进行检测识别的可靠性较低。
技术实现要素:
4.本发明提供基于光学手段的古琴表面材料破损检测识别方法,用于解决现有方法不能可靠的对古琴表面材料破损进行检测识别的问题,所采用的技术方案具体如下:第一方面,本发明一个实施例提供了一种基于光学手段的古琴表面材料破损检测识别方法包括以下步骤:获取待检测古琴各表面的目标三维图像;将所述各表面对应的目标三维图像转化为点云,得到所述目标三维图像对应的点云;对所述点云进行三维曲面的拟合,得到所述目标三维图像对应的拟合曲面;计算所述目标三维图像对应的点云中的各点到对应拟合曲面的距离,得到所述目标三维图像对应的点云中各点的第一离散指标;构建所述点云的三角网;根据所述三角网中以各点为公共顶点的各三角形面积,得到所述目标三维图像对应的点云中各点的第二离散指标;根据所述各点的第一离散指标和所述各点的第二离散指标,对所述目标三维图像对应的点云中的各点进行筛选,得到所述目标三维图像对应的点云中的各目标点;根据所述各目标点的坐标,构建得到所述各目标点对应的特征向量;根据所述特征向量,判断待检测古琴各表面是否出现破损。
5.有益效果:本发明利用线结构光获取待检测古琴各表面的目标三维图像;对各表面对应的目标三维图像对应的点云进行三维曲面的拟合,得到各表面对应的目标三维图像的拟合曲面;之后计算各表面对应的目标三维图像对应的点云中的各点到对应拟合曲面的距离,得到各表面对应的目标三维图像对应的点云中各点的第一离散指标;然后构建各表面对应的目标三维图像对应的点云的三角网;根据三角网中以各点为公共顶点的各三角形面积,得到各表面对应的目标三维图像对应的点云中各点的第二离散指标;再然后根据各
表面对应的目标三维图像对应的点云中各点的第一离散指标和第二离散指标,对各表面对应的目标三维图像对应的点云中的各点进行筛选,得到各表面对应的目标三维图像对应的点云中的各目标点;最后根据各目标点的坐标,构建得到各目标点对应的特征向量;根据所述特征向量,判断待检测古琴各表面是否出现破损。本发明对古琴表面破损进行检测的效率和准确率都较高,并且也是一种智能化和自动化较高的检测识别方法。
6.优选的,对所述点云进行三维曲面的拟合,得到所述目标三维图像对应的拟合曲面;计算所述目标三维图像对应的点云中的各点到对应拟合曲面的距离,得到所述目标三维图像对应的点云中各点的第一离散指标的方法,包括:利用最小二乘法对所述目标三维图像对应的点云进行拟合,得到所述目标三维图像对应的拟合曲面;计算所述目标三维图像对应的点云中的各点到对应曲面的最短距离;将所述最短距离记为所述目标三维图像对应的点云中各点的第一离散指标。
7.优选的,构建所述点云的三角网;根据所述三角网中以各点为公共顶点的各三角形面积,得到所述目标三维图像对应的点云中各点的第二离散指标的方法,包括:利用球枢轴算法构建所述目标三维图像对应的点云的三角网;获取所述三角网中以各点为公共顶点的各三角形的面积;对于所述目标三维图像对应的点云中的任一点:获取以该点为公共顶点的各三角形的面积和,根据以该点为公共顶点的各三角形的面积和,得到该点的第二离散指标。
8.优选的,根据如下公式计算该点的第二离散指标:其中,为该点的第二离散指标,为以该点为公共顶点的各三角形的面积和。
9.优选的,根据所述各点的第一离散指标和所述各点的第二离散指标,对所述目标三维图像对应的点云中的各点进行筛选,得到所述目标三维图像对应的点云中的各目标点的方法,包括:对所述目标三维图像对应的点云进行网格划分,得到所述目标三维图像对应的各网格中的各点;对于所述目标三维图像对应的任一网格中的各点:获取该网格的中心位置,计算该网格中的各点到对应中心位置的距离,选取距离最小的点为中心点;将该网格中的中心点以外的其它点记为该网格中的各特征点;计算该网格中的各特征点到对应中心点的距离,并按照从小到大的顺序排列,得到该网格对应的距离序列;根据该网格对应的距离序列,得到该网格中的各特征点的次序;计算该网格中相邻次序两个特征点之间深度值差值的平方;根据该网格中相邻次序两个特征点之间深度值差值的平方,得到该网格中各特征点的第三离散指标;根据该网格中各特征点的第一离散指标、第二离散指标和第三离散指标,得到该网格的重要程度;判断该网格的重要程度是否大于预设阈值,若是,将该网格中的各点记为目标点;否则,将该网格中的中心点记为目标点。
10.优选的,根据如下公式计算该网格的重要程度:其中,为该网格的重要程度,为该网格中特征点的数量,为该网格中第j个特征点的第一离散指标,为该网格中第j个特征点的第二离散指标,为该网格中第j个特征点的第三离散指标,为第一离散指标的权重,为第二离散指标的权重,为第三离散指标的权重。
11.优选的,根据所述各目标点的坐标,构建得到所述各目标点对应的特征向量;根据所述特征向量,判断待检测古琴各表面是否出现破损的方法,包括:对于所述目标三维图像对应的点云中的任一目标点:获取该目标点的三维坐标;将该目标点的三维坐标分别在三个平面上进行投影,分别得到该目标点在三个面的投影坐标;之后对该目标点在三个面的投影坐标进行傅里叶变换,得到该目标点对应的三个傅里叶描述子;根据该目标点对应的三个傅里叶描述子,构建得到该目标点对应的特征向量;获取标准古琴对应的该目标点的标准特征向量;计算该目标点对应的特征向量与对应标准特征向量之间的余弦相似度;判断所述余弦相似度是否小于预设相似度阈值,若是,则判定该目标点对应的待检测古琴表面区域存在破损的可能性较大,否则,则判定该目标点对应的待检测古琴表面区域存在破损的可能性较小。
附图说明
12.为了更清楚地说明本发明实施例或现有技术中的技术方案和优点,下面将对实施例或现有技术描述中所需要使用的附图作简单的介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它附图。
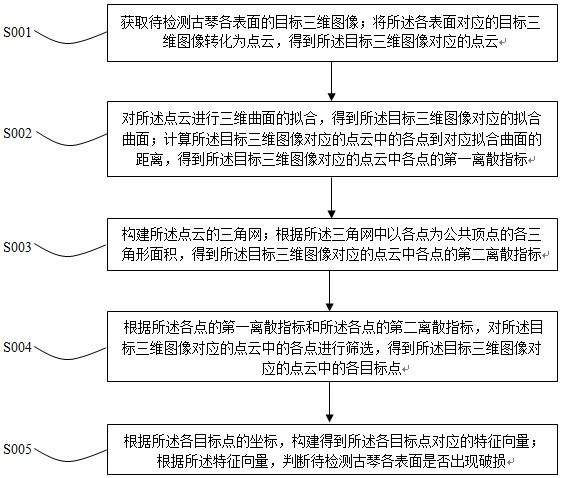
13.图1为本发明一种基于光学手段的古琴表面材料破损检测识别方法的流程图。
具体实施方式
14.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例,基于本发明实施例,本领域普通技术人员所获得的所有其它实施例,都属于本发明实施例保护的范围。
15.除非另有定义,本文所使用的所有的技术和科学技术语与属于本发明的技术人员通常理解的含义相同。
16.本实施例提供了基于光学手段的古琴表面材料破损检测识别方法,详细说明如
下:如图1所示,该基于光学手段的古琴表面材料破损检测识别方法,包括以下步骤:步骤s001,获取待检测古琴各表面的目标三维图像;将所述各表面对应的目标三维图像转化为点云,得到所述目标三维图像对应的点云。
17.由于传统的检测手段难以对不易观察或者较小的破损进行检测,因此本实施例利用激光较为准确的构建出古琴各表面的三维图像,之后利用滤波去除杂乱的噪音点,即由于客观条件造成的无用点,然后基于多个角度对三维图像对应的点云进行筛选,选取对于古琴各表面描述重要程度较大的点,而将一些重复或者重要程度较小的点去除掉,这样不仅可以更加精确的描述出古琴的外表面三维轮廓,而且还能减小后续分析古琴表面是否出现破损的数据量;最后将重要程度较大点的特征作为衡量古琴各表面是否出现破损的依据;这种检测古琴表面破损的方法效率和准确率都较高,并且也是一种智能化和自动化较高的检测识别方法。
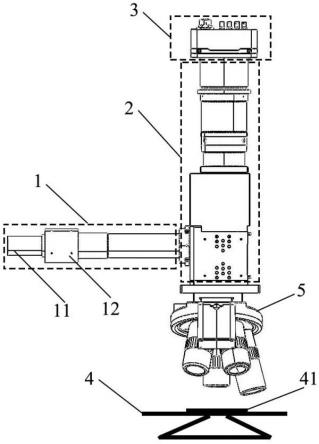
18.本实施例利用线结构光检测装置检测得到待检测古琴各表面的三维图像,所述三维图像可以反应古琴表面的深度信息;所述线结构光检测装置主要由结构光投影器、ccd相机和置物平台组成,其中线结构光投影器用于向古琴表面投射面结构光,面结构光会在古琴表面形成一个线结构光条,ccd相机用于捕获古琴表面的线结构光条;并且检测时古琴放置在置物平台上,然后通过置物平台的移动来实现线结构光对于古琴表面的扫描。
19.利用线结构光扫描获取三维图像时,也会受到人为等外界因素的影响,进而可能使获取的三维图像存在噪声和数据的冗余,可能会影响后续的处理分析;因此本实施例对待检测古琴各表面的三维图像进行双重滤波处理,由于使用线结构光扫描的是古琴的外表面,所以噪声也只会出现在外表面上,因此本实施例使用半圆边缘检测算法去除噪声,由于这种方法没办法完全检测出大尺度的噪声点,所以再用点云模糊c均值聚类的方法去除大尺度噪声;将双重滤波处理之后的三维图像记为待检测古琴各表面的目标三维图像。之后将待检测古琴各表面的目标三维图像转化为点云,得到待检测古琴各表面的目标三维图像对应的点云;得三维图像对应的点云为公知技术,因此本实施例不再详细描述。
20.本实施例中,为了减少计算量和更加精确的描述出待检测古琴的各表面三维轮廓,需要选取对于古琴各表面描述重要程度较大的点进行分析,由于单一的分析角度不能较好的反映各表面的目标三维图像对应的点云中各点的重要程度,因此需要选取多个角度进行衡量分析。
21.步骤s002,对所述点云进行三维曲面的拟合,得到所述目标三维图像对应的拟合曲面;计算所述目标三维图像对应的点云中的各点到对应拟合曲面的距离,得到所述目标三维图像对应的点云中各点的第一离散指标。
22.本实施例中,通过对各表面的目标三维图像对应的点云中的各到对应拟合曲面的距离进行分析,得到各表面的目标三维图像对应的点云中各点的第一离散指标;具体过程为:利用最小二乘法对各表面的目标三维图像对应的点云进行拟合,得到各表面的目标三维图像对应的拟合曲面;之后计算得到各表面的目标三维图像对应的点云中的各点到对应曲面的最短距离;将各表面的目标三维图像对应的点云中的各点到对应曲面的最短距离记为各表面的目标三维图像对应的点云中各点的第一离散指标;并且目标三维图像对应
的点云中的任一点到对应曲面的最短距离越大,表明该点对应待检测古琴表面区域存在破损的可能性越大,即该点的重要程度越大,否则,则表明该点的重要程度越小。
23.本实施例中,利用最小二乘法进行拟合得到曲面为现有技术,因此不再详细描述;本实施例计算点到面的最短距离的方法为拉格朗日乘数法,为现有技术,因此不再详细描述。
24.步骤s003,构建所述点云的三角网;根据所述三角网中以各点为公共顶点的各三角形面积,得到所述目标三维图像对应的点云中各点的第二离散指标。
25.本实施例中,对各表面的目标三维图像对应的点云的三角网进行分析,得到各表面的目标三维图像对应的点云中各点的第二离散指标;具体为:利用球枢轴算法(bpa)构建各表面的目标三维图像对应的点云的三角网,所述球枢轴算法是一种与 alpha 形状相关的表面重建方法;获取所述三角网中以各点为公共顶点的各三角形的面积;对于各表面的目标三维图像对应的点云中的任一点,获取对应三角网中以该点为公共顶点的各三角形的面积和,根据对应三角网中以该点为公共顶点的各三角形的面积和,得到该点的第二离散指标;根据如下公式计算该点的第二离散指标:其中,为该点的第二离散指标,为该点为公共顶点的各三角形的面积和;越大,表明该点对应待检测古琴表面区域存在破损的可能性越大,即该点的重要程度越大,否则,则表明该点的重要程度越小;由于三角网在表面结构变化的地方会呈现三角形密集、单个三角形面积较小的特点,所述表面结构变化包括表面突起、凹陷或者破损,而在较为平坦正常的地方则会呈现三角形面积较大、分布较为分散的特点,因此越小,越大。
26.因此通过上述方式可以得到各表面的目标三维图像对应的点云中各点的第二离散指标。
27.步骤s004,根据所述各点的第一离散指标和所述各点的第二离散指标,对所述目标三维图像对应的点云中的各点进行筛选,得到所述目标三维图像对应的点云中的各目标点。
28.本实施例中,通过对各表面的目标三维图像对应的点云中各点的第一离散指标和第二离散指标进行分析,得到各表面的目标三维图像对应的点云中的各目标点;具体过程为:首先对各表面的目标三维图像对应的点云进行网格划分,得到各表面的目标三维图像对应的各网格中的各点;所述进行网格划分的目的是为了后续对点云中的各点进行筛选;所述网格的大小需要根据待检测古琴表面的尺寸和筛选的精度进行设置。对于各表面的目标三维图像对应的任一网格中的各点:获取该网格的中心位置,计算该网格中的各点到对应中心位置的距离,选取距离最小的点为中心点;将该网格中的中心点以外的其它点记为该网格中各特征点;之后计算该网格中的各特征点到对应中心点的距离,并按照从小到大的顺序排列,得到该网格对应的距离序列;根据该网格对应的距离序列对该网格中的各特征点进行标记,将距离序列中第一个参数对应特征点的次序为1 ,将距离序列中第二个参数对应特征点的次序为2,因此类推,得到该网格中各特征点的次序;然后计算该网格中相邻次序两个特征点之间深度值差值的平方,并将所述相邻次序两个特征点之间深度值差值的平方记为次序较后的特征点
的第三离散指标,如将该网格中次序为3的特征点的深度值与次序为2的特征点的深度值之间差值的平方值记为该网格中次序为3的特征点的第三离散指标,之后将该网格中次序为1的特征点的深度值与中心点的深度值之间深度值差值的平方值记为该网格中次序为1的点的第三离散指标。
29.因此通过上述过程可以该网格中各特征点的第三离散指标;第三离散指标越大,表明该点对应待检测古琴表面区域存在破损的可能性越大,即该点的重要程度越大,否则,则表明该点的重要程度越小;然后对该网格中各特征点的第一离散指标、第二离散指标和第三离散指标进行归一化;根据归一化后该网格中各特征点的第一离散指标、第二离散指标和第三离散指标,得到该网格的重要程度;根据如下公式计算该网格的重要程度:其中,为该网格的重要程度,为该网格中特征点的数量,为归一化后该网格中第j个特征点的第一离散指标,为归一化后该网格中第j个特征点的第二离散指标,为归一化后该网格中第j个特征点的第三离散指标,为第一离散指标的权重,为第二离散指标的权重,为第三离散指标的权重;越大表明该网格的重要程度越高,表明对应的待检测古琴表面存在破损的可能性越大;并且、和的值需要根据实际情况设置,但是满足、和的和为1。
30.本实施例中,通过上述过程可以得到各表面的目标三维图像对应的各网格的重要程度;之后对各表面的目标三维图像对应的各网格的重要程度进行归一化处理,得到各表面的目标三维图像对应的各网格的目标重要程度。
31.对于各表面的目标三维图像对应的任一网格的目标重要程度:判断该网格的目标重要程度是否大于预设阈值,若是,将该网格中的各点记为目标点;否则,将该网格中的中心点记为目标点,将中心点除外的其它点剔除。所述预设阈值需要根据实际情况进行设置,例如可以是0.27等;并且网格的目标重要程度大于预设阈值时表明网格内部的点呈现离散、波动的现象。
32.因此本实施例通过上述过程可以得到各表面的目标三维图像对应的点云中的各目标点;后续只对目标点进行分析,可以减少计算量。
33.步骤s005,根据所述各目标点的坐标,构建得到所述各目标点对应的特征向量;根据所述特征向量,判断待检测古琴各表面是否出现破损。
34.本实施例中,通过对各表面的目标三维图像对应的点云中的各目标点进行分析,构建各表面的目标三维图像对应的点云中的各目标点对应的特征向量;基于各表面的目标三维图像对应的点云中的各目标点对应的特征向量,判断待检测古琴各表面是否出现破损;具体过程为:由于傅里叶变换具有旋转不变性和尺寸不变性,因此可以确保当扫描得到的古琴表面三维模型有位置差异时依然能准确地将古琴表面的破损检测出来;因此对于各表面的目标三维图像对应的点云中的任一目标点:
获取该目标点的三维坐标a(x1,y1,z1),其中,x1为该目标点的横坐标,y1为该目标点的纵坐标,z1为该目标点的竖坐标;将该目标点的三维坐标分别往xy平面,yz平面,xz平面进行投影,分别得到该目标点在三个面的投影坐标,之后对该目标点在三个面的投影坐标进行傅里叶变换,得到该目标点对应的三个傅里叶描述子;根据该目标点对应的三个傅里叶描述子,构建得到该目标点对应的特征向量;按照上述方式得到标准古琴对应的该目标点的标准特征向量;计算该目标点对应的特征向量与对应标准特征向量之间的余弦相似度;并判断所述余弦相似度是否小于预设相似度阈值,若是,则判定该目标点对应的待检测古琴表面区域出现破损的可能性较大,否则,则判定该目标点对应的待检测古琴表面区域出现破损的可能性较小。
35.有益效果:本实施例利用线结构光获取待检测古琴各表面的目标三维图像;对各表面对应的目标三维图像对应的点云进行三维曲面的拟合,得到各表面对应的目标三维图像的拟合曲面;之后计算各表面对应的目标三维图像对应的点云中的各点到对应拟合曲面的距离,得到各表面对应的目标三维图像对应的点云中各点的第一离散指标;然后构建各表面对应的目标三维图像对应的点云的三角网;根据三角网中以各点为公共顶点的各三角形面积,得到各表面对应的目标三维图像对应的点云中各点的第二离散指标;再然后根据各表面对应的目标三维图像对应的点云中各点的第一离散指标和第二离散指标,对各表面对应的目标三维图像对应的点云中的各点进行筛选,得到各表面对应的目标三维图像对应的点云中的各目标点;最后根据各目标点的坐标,构建得到各目标点对应的特征向量;根据所述特征向量,判断待检测古琴各表面是否出现破损。本实施例对古琴表面破损进行检测的效率和准确率都较高,并且也是一种智能化和自动化较高的检测识别方法。
36.以上所述实施例仅用以说明本技术的技术方案,而非对其限制;尽管参照前述实施例对本技术进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本技术各实施例技术方案的精神和范围,均应包含在本技术的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。