1.本发明涉及机器人设备技术领域,尤其涉及一种机器人关节驱动系统。
背景技术:
2.机器人,在科技化现代发展中,可以替代人类工种应付各种复杂的工作场景,机械手臂是机械人技术领域中得到最广泛实际应用的自动化机械装置,在工业制造、医学治疗、娱乐服务、军事、半导体制造以及太空探索等领域都能见到它的身影,机器人手臂的多向运动主要在于多维度的调节转动的关节调整上,实现媲美人类关节的调节效果。
3.现有的机器人设备存在以下问题:现有的机器人设备,在应用过程中,其实现角度调节主要通过齿轮传动以及链带传动方式实现单个维度上的转动调节,这种关节驱动方式,在应用中,由于其每个关节处只能控制一个维度的方向调节,因此需要较大的工作场景,而现有技术不易解决此类问题,因此,亟需机器人关节驱动系统来解决上述问题。
技术实现要素:
4.基于现有机器人设备在关节驱动结构上只能实现单个关节单个维度调整的技术问题,本发明提出了一种机器人关节驱动系统。
5.本发明提出的一种机器人关节驱动系统,包括固定基板,所述固定基板的一端位置通过螺栓固定固定基座,所述驱动筒的一端通过螺栓固定有驱动筒,所述驱动筒的一端设置有关节固定机构,所述关节固定机构的一端沿中心轴线位置设置有小臂主体,所述小臂主体的一端焊接固定有小臂设备衔接柱,所述小臂设备衔接柱的一端通过螺栓固定有设备固定法兰盘。
6.优选地,所述小臂设备衔接柱的一端与圆周外壁一侧位置开设有连通的设备线槽孔,所述驱动筒的圆周外壁一端与小臂主体的圆周外壁另一端之间套接有波纹防护罩,且关节固定机构位于波纹防护罩的内部。
7.优选地,所述关节固定机构包括驱动筒一端中间开设的水平设置的凹模固定槽孔,所述凹模固定槽孔的圆周内壁一端位置设置有凹模本体,所述驱动筒的圆周外壁一端位置和凹模本体的圆周外壁对应位置均开设有圆周阵列的凹模固定栓孔,两组相对应匹配的凹模固定栓孔之间固定有同一个凹模固定螺栓。
8.优选地,所述关节固定机构还包括有凸模关节半球,且凸模关节半球靠近凹模本体的一端与凹模本体的凹面内壁相匹配套接但不固定,所述凹模本体的一端圆周位置通过螺栓固定有密封环,且凸模关节半球位于凹模本体和密封环的中间位置,所述关节固定机构的另一端与驱动筒的一端内壁之间设置有关节驱动机构。
9.优选地,所述关节驱动机构包括凸模关节半球圆周外壁圆周阵列设置的四个钢丝固定栓块,所述驱动筒的一端内壁开设有圆周阵列的四个钢丝槽孔,所述驱动筒的一侧内壁通过螺栓固定有舵机本体,所述舵机本体的输出轴通过螺栓固定有.,所述.的两端位置均固定有钢丝固定端柱,所述钢丝固定栓块和钢丝固定端柱之间固定有同一个钢丝本体。
10.优选地,所述驱动筒的一端位于钢丝槽孔一端内壁位置均套接有钢丝导环,且驱动筒的两侧内壁之间通过轴承固定有钢丝导轮,所述钢丝导轮与钢丝本体相绕接固定,且钢丝导环与钢丝本体相滑动接触但不固定。
11.优选地,所述关节固定机构和小臂主体之间设置有小臂卡接机构,所述小臂卡接机构包括凸模关节半球一端内壁开设的卡接调节腔室,且凸模关节半球的一端顶部和底部位置均通过螺栓固定有被动的卡接角栓,两个所述卡接角栓之间通过螺栓固定有同一个张紧弹簧,所述小臂卡接机构还包括小臂主体另一端内壁中间开设的卡接栓槽孔,且卡接栓槽孔与卡接角栓的展开状态相匹配卡接固定。
12.优选地,所述凸模关节半球的一端内壁设置有小臂卡接驱动机构,所述小臂卡接驱动机构包括凸模关节半球底部内壁通过轴承固定的拉线轴,所述凸模关节半球的顶部内壁通过轴承固定有调节栓杆,所述拉线轴和调节栓杆之间设置有锥齿轮组,所述拉线轴的圆周外壁中间位置套接固定有拉线轮,所述凸模关节半球的一侧内壁开设有水平设置的内滑槽,且内滑槽的内壁滑动卡接有内滑座,所述内滑座的一端设置有一根拉丝,且拉丝与拉线轮相绕接,所述内滑座的另一端设置有两根拉丝,且两根拉丝分别与两个卡接角栓的内壁相固定,位于另一端两个所述拉丝在卡接调节腔室的内壁分别绕接有拉丝导轮。
13.优选地,所述关节驱动机构包括凸模关节半球圆周外壁固定的固定栓环,所述驱动筒的一端内壁通过螺栓固定有十二个调节推杆,所述调节推杆的顶部输出轴均通过铰接固定有同一个水平设置的调节内圆盘。
14.优选地,所述调节内圆盘的顶部圆周位置与固定栓环的底部对应位置通过球头固定有十二个调节顶杆。
15.本发明中的有益效果为:
16.1、该机器人关节驱动系统,通过设置控制内部的舵机本体的角度偏移,可以带动舵机摆杆的角度摆动,从而使得一侧的钢丝本体收缩另一侧的钢丝本体伸长,进而带动一端位置的凸模关节半球进行角度的偏移,实现角度的调节过程,该种关节驱动方式,实现了单个关节处多个维度的角度调节过程。
17.2、该机器人关节驱动系统,通过设置在进行小臂主体的卡接过程中,通过电动扳手带动调节栓杆的转动,使得锥齿轮组驱动内部的拉线轮进行对拉线的收与放,在卡接时,收缩拉线,使得两个卡接角栓收起,进而可以将其卡接到卡接栓槽孔的内部,再通过反向转动,使得拉线轮翻转,通过张紧弹簧的撑开,使得两个卡接角栓撑起,进而使得整个小臂主体卡接固定稳定,区别以往的螺栓固定的方式,使得卡接更加稳定,且可以实现快速的更换。
18.3、该机器人关节驱动系统,通过设置的关节驱动机构,通过环形的调节内圆盘带动一端的固定栓环,通过十二组调节推杆可以控制更加广泛的角度,使得偏移的角度调节的更加的精准。
附图说明
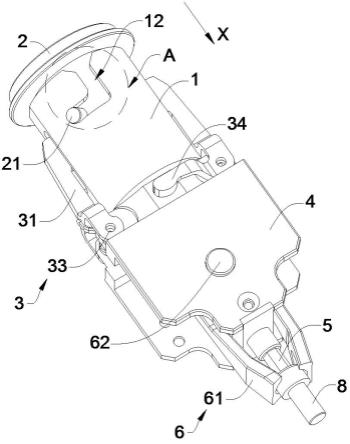
19.图1为本发明实施例一中提出的一种机器人关节驱动系统的整体结构示意图;
20.图2为本发明实施例一中提出的一种机器人关节驱动系统的转动关节细节结构示意图;
21.图3为本发明实施例一中提出的一种机器人关节驱动系统的转动关节爆炸结构示意图;
22.图4为本发明实施例一中提出的一种机器人关节驱动系统的关节调整驱动机构结构示意图;
23.图5为本发明实施例一中提出的一种机器人关节驱动系统的小臂卡接机构结构示意图;
24.图6为本发明实施例二中提出的一种机器人关节驱动系统的转动关节细节结构示意图;
25.图7为本发明实施例二中提出的一种机器人关节驱动系统的转动关节驱动结构示意图;
26.图8为本发明实施例二中提出的一种机器人关节驱动系统的转动关节局部结构示意图。
27.图中:1、固定基板;2、固定基座;3、驱动筒;4、波纹防护罩;5、小臂主体;6、小臂设备衔接柱;7、设备固定法兰盘;8、设备线槽孔;9、关节固定机构;9.1、凹模固定螺栓;9.2、凹模固定槽孔;9.3、凹模本体;9.4、密封环;9.5、凸模关节半球;9.6、凹模固定栓孔;10、关节驱动机构;10.1、钢丝固定栓块;10.2、钢丝导环;10.3、钢丝槽孔;10.4、钢丝固定端柱;10.5、钢丝导轮;10.6、钢丝本体;10.7、舵机摆杆;10.8、舵机本体;10.9、固定栓环;10.10、调节顶杆;10.11、调节内圆盘;10.12、调节推杆;11、小臂卡接机构;11.1、卡接调节腔室;11.2、张紧弹簧;11.3、卡接角栓;11.4、卡接栓槽孔;12、小臂卡接驱动机构;12.1、拉线轮;12.2、拉线轴;12.3、锥齿轮组;12、4、调节栓杆;12.5、内滑槽;12.6、内滑座。
具体实施方式
28.实施例1
29.参照图1-图5,一种机器人关节驱动系统,包括固定基板1,固定基板1的一端位置通过螺栓固定固定基座2,驱动筒3的一端通过螺栓固定有驱动筒3,驱动筒3的一端设置有关节固定机构9,关节固定机构9的一端沿中心轴线位置设置有小臂主体5,小臂主体5的一端焊接固定有小臂设备衔接柱6,小臂设备衔接柱6的一端通过螺栓固定有设备固定法兰盘7。
30.进一步的,小臂设备衔接柱6的一端与圆周外壁一侧位置开设有连通的设备线槽孔8,驱动筒3的圆周外壁一端与小臂主体5的圆周外壁另一端之间套接有波纹防护罩4,且关节固定机构9位于波纹防护罩4的内部;
31.进一步的,关节固定机构9包括驱动筒3一端中间开设的水平设置的凹模固定槽孔9.2,凹模固定槽孔9.2的圆周内壁一端位置设置有凹模本体9.3,驱动筒3的圆周外壁一端位置和凹模本体9.3的圆周外壁对应位置均开设有圆周阵列的凹模固定栓孔9.6,两组相对应匹配的凹模固定栓孔9.6之间固定有同一个凹模固定螺栓9.1;
32.进一步的,关节固定机构9还包括有凸模关节半球9.5,且凸模关节半球9.5靠近凹模本体9.3的一端与凹模本体9.3的凹面内壁相匹配套接但不固定,凹模本体9.3的一端圆周位置通过螺栓固定有密封环9.4,且凸模关节半球9.5位于凹模本体9.3和密封环9.4的中间位置,关节固定机构9的另一端与驱动筒3的一端内壁之间设置有关节驱动机构10;
33.进一步的,关节驱动机构10包括凸模关节半球9.5圆周外壁圆周阵列设置的四个钢丝固定栓块10.1,驱动筒3的一端内壁开设有圆周阵列的四个钢丝槽孔10.3,驱动筒3的一侧内壁通过螺栓固定有舵机本体10.8,舵机本体10.8的输出轴通过螺栓固定有10.7,10.7的两端位置均固定有钢丝固定端柱10.4,钢丝固定栓块10.1和钢丝固定端柱10.4之间固定有同一个钢丝本体10.7;
34.进一步的,驱动筒3的一端位于钢丝槽孔10.3一端内壁位置均套接有钢丝导环10.2,且驱动筒3的两侧内壁之间通过轴承固定有钢丝导轮10.5,钢丝导轮10.5与钢丝本体10.7相绕接固定,且钢丝导环10.2与钢丝本体10.7相滑动接触但不固定;
35.进一步的,关节固定机构9和小臂主体5之间设置有小臂卡接机构11,小臂卡接机构11包括凸模关节半球9.5一端内壁开设的卡接调节腔室11.1,且凸模关节半球9.5的一端顶部和底部位置均通过螺栓固定有被动的卡接角栓11.3,两个卡接角栓11.3之间通过螺栓固定有同一个张紧弹簧11.2,小臂卡接机构11还包括小臂主体5另一端内壁中间开设的卡接栓槽孔11.4,且卡接栓槽孔11.4与卡接角栓11.3的展开状态相匹配卡接固定;
36.进一步的,凸模关节半球9.5的一端内壁设置有小臂卡接驱动机构12,小臂卡接驱动机构12包括凸模关节半球9.5底部内壁通过轴承固定的拉线轴12.2,凸模关节半球9.5的顶部内壁通过轴承固定有调节栓杆12.4,拉线轴12.2和调节栓杆12.4之间设置有锥齿轮组12.3,拉线轴12.2的圆周外壁中间位置套接固定有拉线轮12.1,凸模关节半球9.5的一侧内壁开设有水平设置的内滑槽12.5,且内滑槽12.5的内壁滑动卡接有内滑座12.6,内滑座12.6的一端设置有一根拉丝,且拉丝与拉线轮12.1相绕接,内滑座12.6的另一端设置有两根拉丝,且两根拉丝分别与两个卡接角栓11.3的内壁相固定,位于另一端两个拉丝在卡接调节腔室11.1的内壁分别绕接有拉丝导轮。
37.本发明使用时:通过螺栓将固定基板1进行固定,将需要工作的设备固定在设备固定法兰盘7上,在进行控制过程中,通过控制内部的舵机本体10.8的角度偏移,可以带动舵机摆杆10.7的角度摆动,从而使得一侧的钢丝本体10.6收缩另一侧的钢丝本体10.6伸长,进而带动一端位置的凸模关节半球9.5进行角度的偏移,实现角度的调节过程,在进行小臂主体5的卡接过程中,通过电动扳手带动调节栓杆12.4的转动,使得锥齿轮组12.3驱动内部的拉线轮12.1进行对拉线的收与放,在卡接时,收缩拉线,使得两个卡接角栓11.3收起,进而可以将其卡接到卡接栓槽孔11.4的内部,再通过反向转动,使得拉线轮12.1翻转,通过张紧弹簧11.2的撑开,使得两个卡接角栓11.3撑起,进而使得整个小臂主体5卡接固定稳定,区别以往的螺栓固定的方式,使得卡接更加稳定,且可以实现快速的更换。
38.实施例2
39.参照图1-图8,一种机器人关节驱动系统,包括固定基板1,固定基板1的一端位置通过螺栓固定固定基座2,驱动筒3的一端通过螺栓固定有驱动筒3,驱动筒3的一端设置有关节固定机构9,关节固定机构9的一端沿中心轴线位置设置有小臂主体5,小臂主体5的一端焊接固定有小臂设备衔接柱6,小臂设备衔接柱6的一端通过螺栓固定有设备固定法兰盘7。
40.进一步的,小臂设备衔接柱6的一端与圆周外壁一侧位置开设有连通的设备线槽孔8,驱动筒3的圆周外壁一端与小臂主体5的圆周外壁另一端之间套接有波纹防护罩4,且关节固定机构9位于波纹防护罩4的内部;
41.进一步的,关节固定机构9包括驱动筒3一端中间开设的水平设置的凹模固定槽孔9.2,凹模固定槽孔9.2的圆周内壁一端位置设置有凹模本体9.3,驱动筒3的圆周外壁一端位置和凹模本体9.3的圆周外壁对应位置均开设有圆周阵列的凹模固定栓孔9.6,两组相对应匹配的凹模固定栓孔9.6之间固定有同一个凹模固定螺栓9.1;
42.进一步的,关节固定机构9还包括有凸模关节半球9.5,且凸模关节半球9.5靠近凹模本体9.3的一端与凹模本体9.3的凹面内壁相匹配套接但不固定,凹模本体9.3的一端圆周位置通过螺栓固定有密封环9.4,且凸模关节半球9.5位于凹模本体9.3和密封环9.4的中间位置,关节固定机构9的另一端与驱动筒3的一端内壁之间设置有关节驱动机构10;
43.进一步的,关节固定机构9和小臂主体5之间设置有小臂卡接机构11,小臂卡接机构11包括凸模关节半球9.5一端内壁开设的卡接调节腔室11.1,且凸模关节半球9.5的一端顶部和底部位置均通过螺栓固定有被动的卡接角栓11.3,两个卡接角栓11.3之间通过螺栓固定有同一个张紧弹簧11.2,小臂卡接机构11还包括小臂主体5另一端内壁中间开设的卡接栓槽孔11.4,且卡接栓槽孔11.4与卡接角栓11.3的展开状态相匹配卡接固定;
44.进一步的,凸模关节半球9.5的一端内壁设置有小臂卡接驱动机构12,小臂卡接驱动机构12包括凸模关节半球9.5底部内壁通过轴承固定的拉线轴12.2,凸模关节半球9.5的顶部内壁通过轴承固定有调节栓杆12.4,拉线轴12.2和调节栓杆12.4之间设置有锥齿轮组12.3,拉线轴12.2的圆周外壁中间位置套接固定有拉线轮12.1,凸模关节半球9.5的一侧内壁开设有水平设置的内滑槽12.5,且内滑槽12.5的内壁滑动卡接有内滑座12.6,内滑座12.6的一端设置有一根拉丝,且拉丝与拉线轮12.1相绕接,内滑座12.6的另一端设置有两根拉丝,且两根拉丝分别与两个卡接角栓11.3的内壁相固定,位于另一端两个拉丝在卡接调节腔室11.1的内壁分别绕接有拉丝导轮;
45.进一步的,关节驱动机构10包括凸模关节半球9.5圆周外壁固定的固定栓环10.9,驱动筒3的一端内壁通过螺栓固定有十二个调节推杆10.12,调节推杆10.12的顶部输出轴均通过铰接固定有同一个水平设置的调节内圆盘10.11;
46.进一步的,调节内圆盘10.11的顶部圆周位置与固定栓环10.9的底部对应位置通过球头固定有十二个调节顶杆10.10。
47.本发明使用时:通过设置的关节驱动机构10,通过环形的调节内圆盘10.11带动一端的固定栓环10.9,通过十二组调节推杆10.12可以控制更加广泛的角度,使得偏移的角度调节的更加的精准。
48.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。