1.本发明涉及机械手领域,具体涉及一种安全型角度旋转机械手。
背景技术:
2.机械手是一种能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。特点是可以通过编程来完成各种预期的作业,构造和性能上兼有人和机械手机器各自的优点。因此机械手臂的应用也将会越来越广泛,机械手是近几十年发展起来的一种高科技自动生产设备,作业的准确性和环境中完成作业的能力。
3.机械手正广泛应用于各种领域,但在需要旋转角度时,传统的机械手不方便切换不同角度,导致机械手在使用时转动困难,给操作人员带来的很大困难。
技术实现要素:
4.本发明提供一种安全型角度旋转机械手,以解决传统的机械手不方便切换不同角度的问题。
5.本发明的一种安全型角度旋转机械手采用如下技术方案:一种安全型角度旋转机械手,包括机械臂和安装于机械臂的手爪部;手爪部包括多个支撑装置、预紧装置、动力机构、锁定机构、中置齿盘和前置齿盘;动力机构包括斜齿轮和控制棒;斜齿轮可转动地设置;斜齿轮和控制棒同轴设置,控制棒沿轴向方向设置,初始状态斜齿轮与中置齿盘啮合,中置齿盘上沿圆周方向依次设置有多个弧形槽,每个弧形槽沿中置齿盘转动方向倾斜设置;前置齿盘设置于相对于中置齿盘靠近支撑装置尾端的方向,前置齿盘沿径向方向设置有多个限位通道,每个支撑装置穿过一个限位通道安装于其对应设置的一个弧形槽;预紧装置与控制棒接触,预紧装置用于给斜齿轮与中置齿盘在转动啮合时一个需要克服的最大轴向力,将斜齿轮与中置齿盘在啮合转动至克服最大轴向力时支撑装置所在的位置称为第一预设位置;以在支撑装置处于第一预设位置后,斜齿轮与中置齿盘脱离啮合;锁定机构配置成在斜齿轮与中置齿盘脱离啮合后,将中置齿盘锁定;控制棒靠近支撑装置尾端的一端设置有直齿轮,配置成当控制棒向远离支撑装置尾端的方向移动时,使直齿轮与前置齿盘啮合,以在中置齿盘转动时,带动支撑装置由内而外张开;在中置齿盘锁定前置齿盘转动时,带动支撑装置由外而内收回;还包括腹板,腹板安装于机械臂外壳内。
6.进一步地,预紧装置包括预紧旋钮、第一弹性件、橡胶爪和底座,底座安装于腹板,底座上设置有安装套筒,预紧旋钮安装于安装套筒一端,且与安装套筒螺旋传动,橡胶爪滑动安装于安装套筒另一端,第一弹性件设置于预紧旋钮和橡胶爪之间,橡胶爪与控制棒接触。
7.进一步地,锁定机构包括后置齿环和多个锁定组件;每个锁定组件包括锁定齿条、两个限位孔和锁定齿轮,后置齿环设置于相对中置齿盘远离支撑装置尾端的方向,斜齿轮在径向方向的投影位于中置齿盘在径向方向的投影和后置齿环在径向方向的投影之间,后置齿环上设置有锁定齿槽,锁定齿槽为弧形,锁定齿槽沿后置齿环转动方向倾斜设置,两个
限位孔设置于腹板上,限位孔沿径向方向设置;锁定齿轮设置于锁定齿条与中置齿盘之间,锁定齿轮靠近支撑装置尾端的一端安装于腹板;锁定齿条上设置有滑动柱和限位柱,滑动柱滑动安装于锁定齿槽,滑动柱靠近支撑装置尾端的一端滑动安装于一个限位孔内;限位柱靠近支撑装置尾端的一端滑动安装于另一个限位孔内,以在锁定齿槽转动时,在限位孔的限制下,带动锁定齿条由外到内移动至与锁定齿轮啮合。
8.进一步地,限位孔的径向长度配置成仅允许锁定齿条由外到内移动至与锁定齿轮啮合,锁定齿轮为多个,多个锁定齿轮靠近支撑装置尾端的一端安装于腹板。
9.进一步地,支撑装置包括第一支撑杆和与第一支撑杆相连的第二支撑杆,每个第一支撑杆上均套接有一个软质套筒;每个第二支撑杆穿过一个限位通道安装于其对应设置的一个弧形槽。
10.进一步地,支撑装置为六个,每两个支撑装置沿圆周方向相对设置形成一个支撑组,每个第一支撑杆与每个对应设置的第二支撑杆之间通过第二弹性件相连,还包括第一差速机构和第二差速机构,第一差速机构包括第一阻力组件、第一阻力齿轮和第一异形齿,第一异形齿安装于其中一个支撑组,第一异形齿与第一阻力齿轮啮合,第一阻力组件配置成在支撑装置反转收回时,给第一阻力齿轮阻力,进而限制第一异形齿转动速度;第二差速机构包括第二阻力组件、第二阻力齿轮和第二异形齿,第二异形齿安装于另一个支撑组,第二异形齿与第二阻力齿轮啮合,第一阻力组件和第二阻力组件结构相同,第一阻力齿轮与第二阻力齿轮相同,第二异形齿长度大于第一异形齿。
11.进一步地,第一阻力组件包括安装外壳、阻力轴和单向阀门,安装外壳内部开设有阻力腔,阻力轴转动安装于阻力腔,阻力轴上设置有单向阀门,第一阻力齿轮安装于阻力轴;单向阀门配置成在支撑装置反转收回时,使单向阀门打开。
12.进一步地,还包括电机、主动直齿轮和从动直齿轮啮合,电机轴上设置有主动直齿轮,主动直齿轮与从动直齿轮啮合,从动直齿轮与斜齿轮同轴设置。
13.本发明的有益效果是:1、本发明将传统机械手复杂的操作过程进行简化,通过切换动力机构分别与中置齿盘、后置齿环、前置齿盘的啮合,在斜齿轮与中置齿盘啮合时实现支撑装置的转动张开,在斜齿轮与后置齿环啮合时将中置齿盘锁定,在直齿轮与前置齿盘啮合时实现支撑装置的转动收回,可直接完成角度切换。
14.2、本发明在收回过程中实现了对于六个支撑装置所形成的三个支撑组的分别收回,通过设置第一差速机构和第二差速机构,使得三个支撑组在收回过程中实现差速,保证使用的安全性。
附图说明
15.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
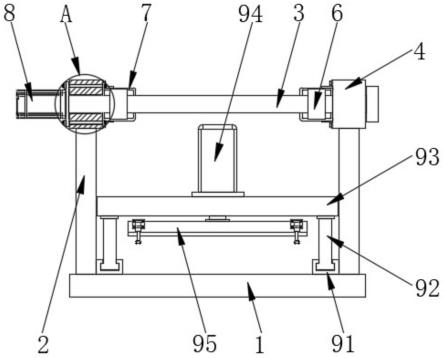
16.图1为本发明的一种安全型角度旋转机械手的实施例的结构示意图;图2为本发明的一种安全型角度旋转机械手的实施例的机械手初始状态示意图;
图3为本发明的一种安全型角度旋转机械手的实施例的机械手张开状态示意图;图4为本发明的一种安全型角度旋转机械手的实施例的机械手换位状态示意图;图5为本发明的一种安全型角度旋转机械手的实施例的机械手爆炸图示意图;图6为本发明的一种安全型角度旋转机械手的实施例的机械手后侧视角的示意图;图7为本发明的一种安全型角度旋转机械手的实施例的动力机构的示意图;图8为本发明的一种安全型角度旋转机械手的实施例的支撑杆连接图示意图;图9为本发明的一种安全型角度旋转机械手的实施例的前置齿盘的示意图;图10为本发明的一种安全型角度旋转机械手的实施例的阻力机构的示意图。
17.图中:100、机械臂;200、机械手;210、支撑装置;211、软质套筒;212、第一支撑杆;213、第一异形齿;214、第二支撑杆;215、第二弹簧;221、前置齿盘;221c、限位通道;222、中置齿盘;223、后置齿环;224、锁定齿条;226、锁定齿轮;227、第一阻力组件;227a、第一阻力齿轮;227b、阻力腔;227c、阻力轴;227d、单向阀门;228、弧形槽;230、腹板;231、限位孔;232、轴孔;240、动力机构;241、控制棒;242a、从动直齿轮;242b、斜齿轮;243、主动直齿轮;244、电机;245、预紧装置;245a、预紧旋钮;245b、第一弹簧;245c、橡胶爪;245d、底座;246、直齿轮;247、第三弹簧。
具体实施方式
18.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
19.本发明的一种安全型角度旋转机械手的实施例,如图1至图10所示。
20.一种安全型角度旋转机械手,包括机械臂100和安装于机械臂100的手爪部;手爪部包括多个支撑装置210、预紧装置245、动力机构240、锁定机构、中置齿盘222和前置齿盘221;动力机构240包括斜齿轮242b和控制棒241;斜齿轮242b可转动地设置;还包括电机244、主动直齿轮243和从动直齿轮242a啮合,电机轴上设置有主动直齿轮243,主动直齿轮243与从动直齿轮242a啮合,从动直齿轮242a与斜齿轮242b同轴设置。电机244转动驱动主动直齿轮243转动,继而将带动主动直齿轮243啮合的从动直齿轮242a转动,从动直齿轮242a转动将带动与其同轴设置的斜齿轮242b转动。斜齿轮242b和控制棒241同轴设置,控制棒241沿轴向方向设置,初始状态斜齿轮242b与中置齿盘222啮合,中置齿盘222上沿圆周方向依次设置有多个弧形槽228,每个弧形槽228沿中置齿盘222转动方向倾斜设置;前置齿盘221设置于相对于中置齿盘222靠近支撑装置210尾端的方向,前置齿盘221沿径向方向设置有多个限位通道221c,每个支撑装置210穿过一个限位通道221c安装于其对应设置的一个弧形槽228;预紧装置245与控制棒241接触,预紧装置245用于给斜齿轮242b与中置齿盘222在转动啮合时一个需要克服的最大轴向力,将斜齿轮242b与中置齿盘222在啮合转动至克服最大轴向力时支撑装置210所在的位置称为第一预设位置;以在支撑装置210处于第一预设位置后,斜齿轮242b与中置齿盘222脱离啮合;锁定机构配置成在斜齿轮242b与中置齿盘222脱离啮合后,将中置齿盘222锁定;控制棒241靠近支撑装置210尾端的一端设置有直齿
轮246,配置成当控制棒241向远离支撑装置210尾端的方向移动时,使直齿轮246与前置齿盘221啮合,以在中置齿盘222转动时,带动支撑装置210由内而外张开;在中置齿盘222锁定前置齿盘221转动时,带动支撑装置210由外而内收回;还包括腹板230,腹板230安装于机械臂100外壳内,具体地,腹板230上开设有用于使直齿轮246的齿轮轴穿过的轴孔232。
21.在另一实施例中,预紧装置245包括预紧旋钮245a、第一弹性件、橡胶爪245c和底座245d,底座245d安装于腹板230,底座245d上设置有安装套筒,预紧旋钮245a安装于安装套筒一端,且与安装套筒螺旋传动,橡胶爪245c滑动安装于安装套筒另一端,第一弹性件设置于预紧旋钮245a和橡胶爪245c之间,橡胶爪245c与控制棒241接触,第一弹性件为第一弹簧245b。
22.斜齿轮242b在传动过程时具有切向方向的分力和轴向方向的分力。将预紧装置245与控制棒241之间的静摩擦力称为fs,将斜齿轮242b轴向方向的分力称为f,初始状态,静摩擦力fs大于斜齿轮242b轴向方向的分力f,以限制动力机构240在轴向方向的移动。在斜齿轮242b与中置齿盘222发生啮合传动带动软质套筒211扩张的过程中,随着扩张程度的不断增加,中置齿盘222转动过程中会不断克服静摩擦力fs的作用,直到f大于fs,动力机构240可在轴向方向向远离支撑装置210尾端的方向移动,即从动直齿轮242a、斜齿轮242b和控制棒241在轴向方向向远离支撑装置210尾端的方向移动。不再带动支撑装置210转动,进而支撑装置210不再继续张开,因此操作人员可设置预紧力的大小,使其可以控制支撑装置210达到所需要的张开程度。
23.在另一实施例中,锁定机构包括后置齿环223和多个锁定组件;每个锁定组件包括锁定齿条224、两个限位孔231和锁定齿轮226,后置齿环223设置于相对中置齿盘222远离支撑装置210尾端的方向,斜齿轮242b在径向方向的投影位于中置齿盘222在径向方向的投影和后置齿环223在径向方向的投影之间,后置齿环223上设置有锁定齿槽,锁定齿槽为弧形,锁定齿槽沿后置齿环223转动方向倾斜设置,两个限位孔231设置于腹板230上,限位孔231沿径向方向设置;锁定齿轮226设置于锁定齿条224与中置齿盘222之间,锁定齿轮226靠近支撑装置210尾端的一端安装于腹板230;锁定齿条224上设置有滑动柱和限位柱,滑动柱滑动安装于锁定齿槽,滑动柱靠近支撑装置210尾端的一端滑动安装于一个限位孔231内;限位柱靠近支撑装置210尾端的一端滑动安装于另一个限位孔231内,以在锁定齿槽转动时,在限位孔231的限制下,带动锁定齿条224由外到内移动至与锁定齿轮226啮合,限位孔231的径向长度配置成仅允许锁定齿条224由外到内移动至与锁定齿轮226啮合,锁定齿轮226为多个,多个锁定齿轮226靠近支撑装置210尾端的一端安装于腹板230。在锁定齿条224与锁定齿轮226啮合后,使锁定齿条224、锁定齿轮226和中置齿盘222同时接触锁定,中置齿盘222将被锁定,当斜齿轮242b受到的分力继续增大至斜齿轮242b向上离开后置齿环223后,关闭电机244,使得支撑装置210保持在张开至预设位置后锁定。
24.在另一实施例中,支撑装置210包括第一支撑杆212和与第一支撑杆212相连的第二支撑杆214,每个第一支撑杆212上均套接有一个软质套筒211;每个第二支撑杆214穿过一个限位通道221c安装于其对应设置的一个弧形槽228。支撑装置210为六个,每两个支撑装置210沿圆周方向相对设置形成一个支撑组,每个第一支撑杆212与每个对应设置的第二支撑杆214之间通过第二弹性件相连,还包括第一差速机构和第二差速机构,第一差速机构包括第一阻力组件227、第一阻力齿轮227a和第一异形齿213,第一异形齿213安装于其中一
个支撑组,第一异形齿213与第一阻力齿轮227a啮合,第一阻力组件227配置成在支撑装置210反转收回时,给第一阻力齿轮227a阻力,进而限制第一异形齿213转动速度;第二差速机构包括第二阻力组件、第二阻力齿轮和第二异形齿,第二异形齿安装于另一个支撑组,第二异形齿与第二阻力齿轮啮合,第一阻力组件227和第二阻力组件结构相同,第一阻力齿轮227a与第二阻力齿轮相同,第二异形齿长度大于第一异形齿213。第一阻力组件227包括安装外壳、阻力轴227c和单向阀门227d,安装外壳内部开设有阻力腔227b,阻力轴227c转动安装于阻力腔227b,阻力轴227c上设置有单向阀门227d,第一阻力齿轮227a安装于阻力轴227c。单向阀门227d配置成在支撑装置210反转收回时,使单向阀门227d打开。
25.收回时,通过斜齿轮242b与前置齿盘221啮合,电机244驱动前置齿盘221反转,带动支撑装置210转动并收回,其中没有安装第一差速机构和第二差速机构的两个相对的支撑装置210可直接收回。安装第一差速机构的两个相对的支撑装置210在收回时,由于第一阻力齿轮227a与第一异形齿213啮合,使第一异形齿213带动阻力轴227c转动,继而打开单向阀门227d,使第一异形齿213与第一阻力齿轮227a在啮合传动时受阻,增加两个相对的支撑装置210收回的时间。因此由于第二差速机构的第二异性齿的长度大于第一差速机构的第一异形齿213,所以其收回的时间也对应增加,此操作使得三个支撑组在收回过程中实现了差速,防止多个支撑装置210一同收缩。
26.工作过程:机械手200安装于机械臂100,将机械手200移动到合适位置,机械手200使用前处于如图2所示的初始状态。初始状态支撑装置210为收缩状态,启动电机244,如图6,电机244转动将带动安装于电机轴的主动直齿轮243转动,主动直齿轮243转动将驱动动力机构240运动,动力机构240包括从动直齿轮242a、斜齿轮242b和控制棒241。即主动直齿轮243转动将带动主动直齿轮243啮合的从动直齿轮242a转动,从动直齿轮242a转动将带动与其同轴设置的斜齿轮242b转动,斜齿轮242b转动将带动与斜齿轮242b啮合传动的中置齿盘222转动,中置齿盘222上沿圆周方向依次设置有多个弧形槽228,如图5,每个弧形槽228沿中置齿盘222转动方向倾斜设置。
27.如图5,初始状态,每个第二支撑杆214安装于其对应设置的一个弧形槽228内端,第一支撑杆212与第二支撑杆214相连,因此,当中置齿盘222转动,将带动第二支撑杆214在弧形槽228内滑动,第二支撑杆214将从弧形槽228内端向外端滑动,继而带动第一支撑杆212从收缩状态转变为张开状态,每个第一支撑杆212上均套接有一个软质套筒211,第一支撑杆212带动软质套筒211扩张。
28.如图6-图7,预紧装置245包括预紧旋钮245a、第一弹簧245b、橡胶爪245c和底座245d,底座245d安装于腹板230,腹板230安装于机械臂100外壳内。底座245d上设置有安装套筒,预紧旋钮245a安装于安装套筒一端,且与安装套筒螺旋传动,橡胶爪245c滑动安装于安装套筒另一端,第一弹簧245b设置于预紧旋钮245a和橡胶爪245c之间。通过转动预紧旋钮245a,使得预紧旋钮245a挤压第一弹簧245b,进而挤压橡胶爪245c,橡胶爪245c与控制棒241接触。
29.斜齿轮242b在传动过程时具有切向方向的分力和轴向方向的分力。将预紧装置245与控制棒241之间的静摩擦力称为fs,将斜齿轮242b轴向方向的分力称为f,初始状态,静摩擦力fs大于斜齿轮242b轴向方向的分力f,以限制动力机构240在轴向方向的移动。在斜齿轮242b与中置齿盘222发生啮合传动带动软质套筒211扩张的过程中,随着扩张程度的
不断增加,中置齿盘222转动过程中会不断克服静摩擦力fs的作用,直到f大于fs,动力机构240可在轴向方向向远离支撑装置210尾端的方向移动,即从动直齿轮242a、斜齿轮242b和控制棒241在轴向方向向远离支撑装置210尾端的方向移动。不再带动支撑装置210转动,进而支撑装置210不再继续张开,因此操作人员可设置预紧力的大小,使其可以控制支撑装置210达到机械手200所需要的张开程度。
30.后置齿环223设置于相对于中置齿盘222远离支撑装置210尾端的方向,斜齿轮242b向远离第一支撑杆212的方向移动后将于后置齿环223啮合,斜齿轮242b在径向方向的投影位于中置齿盘222在径向方向的投影和后置齿环223在径向方向的投影之间。
31.因此电机244转动带动斜齿轮242b转动,继而将带动后置齿环223转动,后置齿环223转动方向与斜齿轮242b带动中置齿盘222转动的方向相反,后置齿环223上设置有锁定齿槽,锁定齿条224设置于后置齿环223内端,锁定齿槽为弧形,锁定齿槽沿后置齿环223转动方向倾斜设置。锁定齿条224上设置有滑动柱,可使锁定齿条224滑动安装于锁定齿槽,滑动柱靠近第一支撑杆212的一端滑动安装于腹板230上开设的一个限位孔231内。锁定齿条224上设置有限位柱,限位柱靠近第一支撑杆212的一端滑动安装于腹板230上开设的另一个限位孔231内。
32.限位孔231沿径向方向设置,锁定齿轮226设置于锁定齿条224与中置齿盘222之间,锁定齿轮226靠近第一支撑杆212的一端安装于腹板230。以在锁定齿槽转动时,在限位孔231的限制下,带动锁定齿条224由外到内移动,限位孔231的径向长度配置成仅允许锁定齿条224由外到内移动至与锁定齿轮226啮合。
33.在锁定齿条224与锁定齿轮226啮合后,使锁定齿条224、锁定齿轮226和中置齿盘222同时接触锁定,中置齿盘222将被锁定,当斜齿轮242b受到的分力继续增大至斜齿轮242b向上离开后置齿环223后,关闭电机244,使得支撑装置210保持在张开至预设位置后锁定。
34.当操作人员需要切换位置,则可使控制棒241向远离支撑装置210尾端的方向移动,控制棒241靠近第一支撑杆212的一端设置有直齿轮246,直齿轮246与腹板230之间通过第三弹性件相连,第三弹性件为第三弹簧247。在控制棒241带动下,使直齿轮246与前置齿盘221啮合,前置齿盘221设置于相对于中置齿盘222靠近第一支撑杆212的方向,将带动前置齿盘221转动,前置齿盘221沿径向方向设置有多个限位通道221c,每个第二支撑杆214穿过一个限位通道221c安装于其对应设置的一个弧形槽228内端,第一支撑杆212与第二支撑杆214固接,此时中置齿盘222被锁定,因此前置齿盘221转动将带动第二支撑杆214在限位通道221c内由外而内滑动,即支撑装置210一边旋转一边缩小撑开程度,方便操作。如图4。机械手200再次扩大,下压控制棒241至靠近第一支撑杆212的方向,按压过程中,先经过后置齿环223,后置齿环223受到切向力转动,带动锁定齿条224外扩离开锁定齿轮226解除锁定,使直齿轮246与前置齿盘221脱离啮合,然后启动电机244,斜齿轮242b与中置齿盘222啮合转动,再次推开支撑装置210即可继续使用。使用完毕后,若需要收回支撑装置210,本技术中设置有六个支撑装置210,每两个支撑装置210沿圆周方向相对设置形成一个支撑组,即本技术中有三个支撑组,每个第一支撑杆212与每个对应设置的第二支撑杆214之间通过第二弹性件相连,第二弹性件为第二弹簧215。
35.还包括第一差速机构和第二差速机构,第一差速机构包括第一阻力组件227、第一
阻力齿轮227a和第一异形齿213,第一异形齿213安装于其中一个支撑组,第一异形齿213与第一阻力齿轮227a啮合,第一阻力组件227配置成在支撑装置210反转收回时,给第一阻力齿轮227a阻力,进而限制第一异形齿213的转动速度;第二差速机构包括第二阻力组件、第二阻力齿轮和第二异形齿,第二异形齿安装于另一个支撑组,第二异形齿与第二阻力齿轮啮合,第一阻力组件227和第二阻力组件结构相同,第一阻力齿轮227a与第二阻力齿轮相同,第二异形齿长度大于第一异形齿213。第一阻力组件227包括安装外壳、阻力轴227c和单向阀门227d,安装外壳内部开设有阻力腔227b,阻力轴227c转动安装于阻力腔227b,阻力轴227c上设置有单向阀门227d,第一阻力齿轮227a安装于阻力轴227c。单向阀门227d配置成在支撑装置210反转收回时,使单向阀门227d打开。如图10,第一阻力组件227内部开设有阻力腔227b,阻力轴227c转动安装于阻力腔227b,阻力轴227c上设置有单向阀门227d,阻力轴227c连接第一阻力齿轮227a。第一异形齿213安装于第一支撑杆212,第一异形齿213与第一阻力齿轮227a啮合。收回时,通过斜齿轮242b与前置齿盘221上设置的前置齿盘221啮合,电机244驱动前置齿盘221反转,带动支撑装置210转动并收回,其中没有安装第一差速机构和第二差速机构的两个相对的支撑装置210可直接收回。安装第一差速机构的两个相对的支撑装置210在收回时,由于第一阻力齿轮227a与第一异形齿213啮合,使第一异形齿213带动阻力轴227c转动,继而打开单向阀门227d,使第一异形齿213与第一阻力齿轮227a在啮合传动时受阻,增加两个相对的支撑装置210收回的时间。因此由于第二差速机构的第二异性齿的长度大于第一差速机构的第一异形齿213,所以其收回的时间也对应增加,此操作使得三个支撑组在收回过程中实现了差速,防止多个支撑装置210一同收缩。
36.本发明可以将传统机械手200复杂的操作过程进行简化,将支撑装置210旋转缩小同步完成,可以在不抽出机械手200的情况下,完成角度切换。
37.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。