1.本发明涉及一种物流用分拣装置,设于物流分拣的技术领域,具体是一种物流用分拣装置。
背景技术:
2.物流包括货物的分拣、运输、仓储、包装、搬运装卸、流通加工、配送以及相关的环节。随着互联网的不断发展,人们足不出户就可以购买所需物品。随着人们网上购物越来越频繁,产生的快递包裹数量也越来越多,对物流的输送效率要求也越来越高。
3.但是现有的物流分拣装置还存在一些问题,为了能够对包裹进行分类,进而操作人员会先将包裹放置在一个环形的运输带上,然后在运输带上安装有激光检测装置,然后通过设置的激光检测装置,进而能够采集包裹的信息,进而能够将包裹运输至既定区域,完成对包裹的分拣工作,但是当激光检测装置上存在灰尘或者包裹的快递条上存在污渍时,此时激光检测装置在扫描时会得到包裹的错误信息,进而会将包裹运输至其他位置,进而导致包裹离目的地越来越远,进而造成物流运输效率降低,因此当下一个物流中心发现不属于本区域的包裹时,此时包裹会被转送至上一个物流中心或者被送至中转站,然后在对该物流进行配送,进而使其能够位于目的地,进而使快递能够被送至客户手上,但是这种做法会导致客户收取快递的时间变长,进而降低客户的满意度,同时导致物流输送效率降低。
4.因此,如何对分配错误的包裹的运输区域进行调节,是目前需要解决的问题。
技术实现要素:
5.发明目的:提供一种物流用分拣装置,以解决现有技术存在的上述问题。
6.技术方案:一种物流用分拣装置,包括:工作台,设于所述工作台上的支撑架和多个运输设备,设置在所述支撑架上的位移组件,与所述支撑架抵接的运输机构,以及与所述运输机构连接的下料组件;所述运输机构包括与所述支撑架抵接的运输件,与所述运输件连接的下料部,与所述下料部连接的下料管道,以及设于所述支撑架上的纠错部;所述运输件上设有多个视觉检测设备;所述纠错部包括设于所述支撑架上的驱动单元,与所述驱动单元连接的传动块,以及对称安装在所述运输件上的一组安装架;传动块与其中一个安装架连接;当包裹位于运输件上的错误区域时,所述驱动单元带动运输件在工作台长度方向上运动,调节运输件所对应的下料部,使包裹落入既定的下料组件中,然后下料组件将包裹放置在其中一个运输设备上,使包裹能够位于既定区域;所述运输件包括下料板,以及设置在所述下料板上的n个隔板,进而能够将运输件划分成n 1个区域,此时下料部的数量为n 1,所述位移组件的数量为2n 2(n为正整数);所述隔板上设有至少两个视觉检测设备;所述视觉检测设备和运输设备为现有技术;其中一
个下料组件对应多个运输设备;所述运输设备为星型结构。
7.在进一步的实施例中,所述驱动单元包括固定安装在所述支撑架上的第一支座和两个第二支座,与所述第一支座连接的纠错电机,设于所述纠错电机输出端的第一转动轮,用于连接两第二支座的传动丝杆,设于所述传动丝杆上的第二转动轮,以及用于连接所述第一转动轮与第二转动轮的传动皮带;所述传动块设置在传动丝杆上;通过上述的纠错部,进而在包裹运输过程中就可以对包裹的运输位置进行调整,不需要人工对错误位置的包裹进行筛选以及避免了包裹运输至错误的区域,进而提高了快递的运输效率。在进一步的实施例中,所述支撑架上还对称安装有一组传动滑轨,以及与所述传动滑轨滑动连接的一组传动滑块;所述传动滑块与安装架连接。
8.在进一步的实施例中,所述下料部包括与所述运输件连接的第一限位板,设于所述支撑架上的固定座,设置在所述固定座上的伸缩气缸,与所述伸缩气缸输出端连接的升降块,位于所述升降块上的磁吸件,以及与所述运输件滑动连接的第二限位板;至少在下料过程中,所述磁吸件能够吸附第二限位板,进而使第二限位板远离第一限位板,包裹从第一限位板与第二限位板之间通过;当纸箱包裹位于错误的运输区域时,此时磁吸件不工作,使第一限位板与第二限位板抵接,能够起到对位于错误运输区域包裹的限位,避免包裹运送至错误的下料部中;所述磁吸件为现有技术;所述磁吸件能够对第二限位板起到吸附的功能;使包裹与第二限位板抵接,进而当完成包裹位置调节工作后,能够直接落入正确的下料口,进而提高了包裹的运输效率。
9.在进一步的实施例中,所述位移组件包括多个位于所述支撑架上的位移部;所述位移部包括固定安装在所述支撑架上的驱动电机,与所述驱动电机输出端连接的旋转架,以及位于所述旋转架上的支撑轮;所述支撑架上设有圆形凹槽,所述支撑轮位于凹槽中;所述支撑轮在驱动电机的带动下,在凹槽中运动;调节包裹的运输方向。
10.在进一步的实施例中,所述旋转架上还设有调节电机,设于所述调节电机输出端的主动轮,安装在所述旋转架上的三个连接轴,设于所述连接轴上的从动轮,用于连接所述从动轮与主动轮的传动带,以及设置在所述连接轴上的驱动轮;其中一个连接轴上对称安装有两个驱动轮,剩余两个连接轴上只设有一个驱动轮;三个连接轴的轴线相互平行且位于同一平面;能够使其中一个位移部运动,进而调节包裹的运输方向,进而使其位于相应运输件上的运输区域,进而完成对包裹的运输工作,然后在驱动轮的运动下,能够将包裹输送至运输件上,进而完成对包裹的运输工作。
11.在进一步的实施例中,所述下料组件包括与下料管道连接的连接板,贯穿于所述连接板的运输管道,均匀设置在所述连接板上的至少三个转动电机,与所述转动电机输出端连接的第一连接臂,与所述第一连接臂铰接的第二连接臂,以及用于连接所述第二连接臂的连接块;通过设置的第一连接臂与第二连接臂,进而能够调节连接块上的包裹的放置区域,从而能够根据包裹的运输信息,进而能够将其放置其中一个运输设备上,进而保证其
能够运输至既定位置;所述下料部和下料组件中设有缓冲垫。
12.在进一步的实施例中,所述连接块上还设有限位阀;所述限位阀包括固定安装在所述连接块上的支撑板,设于所述支撑板上的限位气缸,与所述限位气缸输出端连接的限位板,以及对称安装在所述限位板两侧的一组限位管;在非工作状态,所述限位管的轴线与运输管道的轴线相重合;通过设置的限位阀,进而能够使包裹先位于限位板上,然后完成对包裹的位置调节工作后,此时使包裹能够落入既定的运输设备上。
13.一种基于物流用分拣装置的分拣方法,包括:s1:操作人员先将包裹放置在环形运输带上,然后环形运输带上的激光检测装置对包裹的信息进行扫描,然后将扫描结果反馈到主控制系统上,然后主控制系统根据包裹上的信息,进而将其分配至既定的位置,进而能够将包裹运输至位移组件上的既定位置;s2:当包裹位于位移组件上的既定位置后,此时驱动电机开始工作,进而运动的驱动电机能够带动旋转架开始运动,进而运动的旋转架能够调节驱动轮的轴线方向,然后能够改变与驱动轮抵接的包裹的位置;s3:当完成对包裹位置的调节工作后,此时调节电机开始工作,进而运动的调节电机带动主动轮开始转动,然后运动的主动轮能够带动传动带开始运动,然后运动的传动带能够带动从动轮开始运动,然后运动的从动轮能够带动与之连接的连接轴开始转动,进而能够带动套接在所述连接轴上的驱动轮开始运动,进而能够使包裹位于运输件上的既定运输位置;s4:当包裹位于运输件上后,此时运输件上的视觉检测设备开始工作;当视觉检测设备的检测结果与激光检测设备的检测结果一致时,此时包裹位于正确的运输位置,进而能够保证包裹能够被运送至收件人手中;当视觉检测设备的检测结果与激光检测设备的检测结果不一致时,此时包裹位于不正确的运输位置,此时纠错电机开始工作,进而运动的纠错电机带动与之连接的第一转动轮开始运动,然后运动的第一转动轮带动传动皮带开始转动,然后运动的传动皮带带动第二转动轮开始工作,然后运动的第二转动轮能够带动传动丝杆开始运动,进而能够带动传动块在传动丝杆长度方向上开始运动,进而能够调节运输件的位置,进而完成对运输件上包裹的所在区域进行调节,然后根据视觉检测设备的检测结果,进而能够使其位于运输件上的正确区域,进而能够使其从正确的下料部处运出,进而完成对包裹运输区域的调节工作;s5:当包裹位于运输件上的正确区域时,此时磁吸件开始工作,进而运动的磁吸件能够对第二限位板起到吸附的功能,然后伸缩气缸开始工作,然后运动的伸缩气缸能够带动升降块开始工作,进而运动的升降块能够提升第二限位板的高度,进而使其远离第一限位板,此时包裹可从两限位板之间通过;当包裹位于运输件上的不正确区域时,磁吸件不工作,第二限位板与第一限位板抵接,进而能够起到对包裹的限位工作,进而避免包裹运输至错误区域;s6:当包裹经过下料部,经由下料管道落入至下料组件中时,由于下料管道的出料口与运输管道的进料口抵接,进而包裹会落入至连接块上,然后根据包裹的信息,进而调节各个转动电机的转动幅度,进而能够带动第一连接臂开始运动,进而运动的第一连接臂能
够带动第二连接臂开始运动,进而能够调节连接块上的包裹的位置;s7:当包裹位于其中一个运输设备的正上方后,此时限位气缸开始工作,进而运动的限位气缸带动限位板开始工作,进而包裹能够落入至既定的运输设备上,进而运动设备能够将包裹运送至既定位置,然后重复上述步骤s1
‑ꢀ
s7,进而完成对包裹的分拣工作。
14.有益效果:本发明公开了一种物流用分拣装置,为了分配错误的包裹的运输区域进行调节,能够使其从正确的下料组件中落下,进而本装置中设于纠错部,当运输件上的视觉检测设备的检测结果与激光检测设备的检测结果不一致时,此时包裹位于不正确的运输位置,此时纠错电机开始工作,进而运动的纠错电机带动与之连接的第一转动轮开始运动,然后运动的第一转动轮带动传动皮带开始转动,然后运动的传动皮带带动第二转动轮开始工作,然后运动的第二转动轮能够带动传动丝杆开始运动,进而能够带动传动块在传动丝杆长度方向上开始运动,进而能够调节运输件的位置,进而完成对运输件上包裹的所在区域进行调节,然后根据视觉检测设备的检测结果,进而能够使其位于运输件上的正确区域,进而能够使其从正确的下料部处运出,进而完成对包裹运输区域的调节工作,避免包裹被运输至错误的区域,从而拉长整个快递的时间,保证包裹能够快速运输到收件人手上。
附图说明
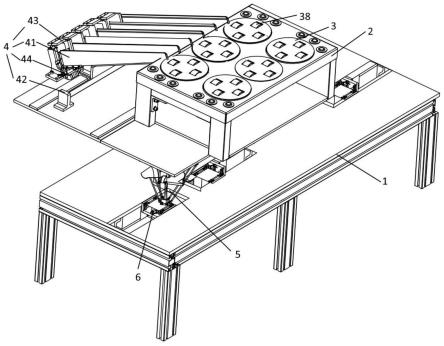
15.图1是本发明的立体图。
16.图2是本发明的位移组件结构示意图。
17.图3是本发明的纠错部结构示意图。
18.图4是本发明的下料部结构示意图。
19.图5是本发明的下料组件结构示意图。
20.图6是本发明的限位阀结构示意图。
21.附图标记为:工作台1、支撑架2、位移组件3、运输机构4、下料组件5、运输设备6、驱动电机31、旋转架32、支撑轮33、调节电机34、主动轮35、连接轴36、从动轮37、驱动轮38、运输件41、纠错部42、下料部43、下料管道44、连接板51、转动电机52、第一连接臂53、第二连接臂54、连接块55、运输管道56、限位阀57、第一支座421、纠错电机422、第一转动轮423、传动皮带424、第二转动轮425、传动丝杆426、传动块427、传动滑轨428、传动滑块429、安装架4210、第二支座4211、伸缩气缸431、升降块432、磁吸件433、第一限位板434、第二限位板435、固定座436、支撑板571、限位气缸572、限位板573、限位管574。
具体实施方式
22.经过申请人的研究分析,出现这一问题(当下一个物流中心发现不属于本区域的包裹时,此时包裹会被转送至上一个物流中心或者被送至中转站,然后在对该物流进行配送,进而使其能够位于目的地,进而使快递能够被送至客户手上,但是这种做法会导致客户收取快递的时间变长,进而降低客户的满意度,同时导致物流输送效率降低)的原因在于为了能够对包裹进行分类,进而操作人员会先将包裹放置在一个环形的运输带上,然后在运输带上安装有激光检测装置,然后通过设置的激光检测装置,进而能够采集包裹的信息,进而能够将包裹运输至既定区域,完成对包裹的分拣工作,但是当激光检测装置上存在灰尘或者包裹的快递条上存在污渍时,此时激光检测装置在扫描时会得到包裹的错误信息,进
而会将包裹运输至其他位置,进而导致包裹离目的地越来越远,进而造成物流运输效率降低,本发明为了能够对分配错误的包裹的运输区域进行调节,能够使其从正确的下料组件中落下,进而本装置中设于纠错部,当运输件上的视觉检测设备的检测结果与激光检测设备的检测结果不一致时,此时包裹位于不正确的运输位置,此时纠错电机开始工作,进而运动的纠错电机带动与之连接的第一转动轮开始运动,然后运动的第一转动轮带动传动皮带开始转动,然后运动的传动皮带带动第二转动轮开始工作,然后运动的第二转动轮能够带动传动丝杆开始运动,进而能够带动传动块在传动丝杆长度方向上开始运动,进而能够调节运输件的位置,进而完成对运输件上包裹的所在区域进行调节,然后根据视觉检测设备的检测结果,进而能够使其位于运输件上的正确区域,进而能够使其从正确的下料部处运出,进而完成对包裹运输区域的调节工作,避免包裹被运输至错误的区域,从而拉长整个快递的时间,保证包裹能够快速运输到收件人手上。
23.一种物流用分拣装置,包括:工作台1、支撑架2、位移组件3、运输机构4、下料组件5、运输设备6、驱动电机31、旋转架32、支撑轮33、调节电机34、主动轮35、连接轴36、从动轮37、驱动轮38、运输件41、纠错部42、下料部43、下料管道44、连接板51、转动电机52、第一连接臂53、第二连接臂54、连接块55、运输管道56、限位阀57、第一支座421、纠错电机422、第一转动轮423、传动皮带424、第二转动轮425、传动丝杆426、传动块427、传动滑轨428、传动滑块429、安装架4210、第二支座4211、伸缩气缸431、升降块432、磁吸件433、第一限位板434、第二限位板435、固定座436、支撑板571、限位气缸572、限位板573、限位管574。
24.在进一步的实施例中,当激光检测装置上存在灰尘或者包裹的快递条上存在污渍时,此时激光检测装置在扫描时会得到包裹的错误信息,进而会将包裹运输至其他位置,进而导致包裹离目的地越来越远,进而造成物流运输效率降低;而为了解决上述问题,进而在包裹运输至下一物流中心后,此时当下一个物流中心发现不属于本区域的包裹时,此时包裹会被转送至上一个物流中心或者被送至中转站,然后在对该物流进行配送,进而使其能够位于目的地,进而使快递能够被送至客户手上,但是这种做法会导致客户收取快递的时间变长,进而降低客户的满意度,同时导致物流输送效率降低。
25.为了解决上述问题,进而本装置中设有工作台1,设于所述工作台1上的支撑架2和多个运输设备6,设置在所述支撑架2上的位移组件3,与所述支撑架2抵接的运输机构4,以及与所述运输机构4连接的下料组件5;所述运输机构4包括与所述支撑架2抵接的运输件41,与所述运输件41连接的下料部43,与所述下料部43连接的下料管道44,以及设于所述支撑架2上的纠错部42;所述运输件41上设有多个视觉检测设备;所述纠错部42包括设于所述支撑架2上的驱动单元,与所述驱动单元连接的传动块427,以及对称安装在所述运输件41上的一组安装架4210;传动块427与其中一个安装架4210连接;当包裹位于运输件41上的错误区域时,所述驱动单元带动运输件41在工作台1长度方向上运动,调节运输件41所对应的下料部43,使包裹落入既定的下料组件5中,然后下料组件5将包裹放置在其中一个运输设备6上,使包裹能够位于既定区域;进而在分拣过程中就能够对位于错误区域的包裹的位置进行调整,进而使包裹能够从正确的下料组件5中运出,进而能够位于正确的运输设备6上;进而在包裹运输过程中就能够对包裹的位置进行调整,而由于环形运输带上的两相邻包裹之间存在一定的距离,进而在对包裹位置的调节过程中,下一包裹还未能够位于运输件41上,进而保证剩余包裹能够顺利运行,此时当运输件41上存在多个位于错误位置的包裹时,
此时可通过装置对其位置进行调节或人工对其进行调节,在调节前需要人工对激光检测装置或条码打印装置进行检测,避免激光检测装置粘上灰尘或条码打印装置的损坏,而导致包裹位于错误区域。
26.在进一步的实施例中,当包裹位于运输件41上的错误区域时,此时会导致包裹从错误的下料组件5处运出,使包裹被运输至其他的运输中心,进而导致包裹远离收件人的位置,进而拉长了整个快递运输线,降低了快递的运输效率。
27.为了解决上述问题,进而本装置中设有所述驱动单元包括固定安装在所述支撑架2上的第一支座421和两个第二支座4211,与所述第一支座421连接的纠错电机422,设于所述纠错电机422输出端的第一转动轮423,用于连接两第二支座4211的传动丝杆426,设于所述传动丝杆426上的第二转动轮425,以及用于连接所述第一转动轮423与第二转动轮425的传动皮带424;所述传动块427设置在传动丝杆426上;所述支撑架2上还对称安装有一组传动滑轨428,以及与所述传动滑轨428滑动连接的一组传动滑块429;所述传动滑块429与安装架4210连接;当包裹位于运输件41上后,此时运输件41上的视觉检测设备开始工作;当视觉检测设备的检测结果与激光检测设备的检测结果一致时,此时包裹位于正确的运输位置,进而能够保证包裹能够被运送至收件人手中;当视觉检测设备的检测结果与激光检测设备的检测结果不一致时,此时包裹位于不正确的运输位置,此时纠错电机422开始工作,进而运动的纠错电机422带动与之连接的第一转动轮423开始运动,然后运动的第一转动轮423带动传动皮带424开始转动,然后运动的传动皮带424带动第二转动轮425开始工作,然后运动的第二转动轮425能够带动传动丝杆426开始运动,进而能够带动传动块427在传动丝杆426长度方向上开始运动,进而能够调节运输件41的位置,进而完成对运输件41上包裹的所在区域进行调节,然后根据视觉检测设备的检测结果,进而能够使其位于运输件41上的正确区域,进而能够使其从正确的下料部43处运出,进而完成对包裹运输区域的调节工作;通过上述的纠错部42,进而在包裹运输过程中就可以对包裹的运输位置进行调整,不需要人工对错误位置的包裹进行筛选以及避免了包裹运输至错误的区域,进而提高了快递的运输效率。
28.在进一步的实施例中,为了保证位于运输件41上的包裹能够被运输至既定位置,进而运输件41上的每个运输区域均设有一个传送带单元,所述传送带单元为现有技术,当包裹位于传动带单元上时,所述传送带单元能够将包裹运输至既定区域,同时运输件41与支撑架2之间存在预定的倾角,进而能够完成对包裹的运输,但是当包裹位于错误的运输区域时,此时在重力和传送带单元的配合下,包裹会从错误的下料部43中运出,进而导致包裹运送至非目标区域,而当包裹位于错误的运输区域时,此时如果直接停止传送带单元的运动,虽然能够避免包裹被运输至错误区域,但是由于纠错过程中,包裹与下料部43之间存在一定的距离,进而在完成纠错工作后,包裹仍需要运动一定距离,进而降低了包裹的运输效率。
29.为了解决上述问题,进而本装置中设有下料部43,所述下料部43包括与所述运输件41连接的第一限位板434,设于所述支撑架2上的固定座436,设置在所述固定座436上的伸缩气缸431,与所述伸缩气缸431输出端连接的升降块432,位于所述升降块432上的磁吸件433,以及与所述运输件41滑动连接的第二限位板435;至少在下料过程中,所述磁吸件433能够吸附第二限位板435,进而使第二限位板435远离第一限位板434,包裹从第一限位
板434与第二限位板435之间通过;当包裹位于错误的运输区域时,此时磁吸件433不工作,使第一限位板434与第二限位板435抵接,能够起到对位于错误运输区域包裹的限位,避免包裹运送至错误的下料部43中;当包裹位于运输件41上的正确区域时,此时磁吸件433开始工作,进而运动的磁吸件433能够对第二限位板435起到吸附的功能,然后伸缩气缸431开始工作,然后运动的伸缩气缸431能够带动升降块432开始工作,进而运动的升降块432能够提升第二限位板435的高度,进而使其远离第一限位板434,此时包裹可从两限位板573之间通过;当包裹位于运输件41上的不正确区域时,磁吸件433不工作,第二限位板435与第一限位板434抵接,进而能够起到对包裹的限位工作,进而避免包裹运输至错误区域;使包裹与第二限位板435抵接,进而当完成包裹位置调节工作后,能够直接落入正确的下料口,进而提高了包裹的运输效率。
30.所述位移组件3包括多个位于所述支撑架2上的位移部;所述位移部包括固定安装在所述支撑架2上的驱动电机31,与所述驱动电机31输出端连接的旋转架32,以及位于所述旋转架32上的支撑轮33;所述支撑架2上设有圆形凹槽,所述支撑轮33位于凹槽中;所述支撑轮33在驱动电机31的带动下,在凹槽中运动;所述旋转架32上还设有调节电机34,设于所述调节电机34输出端的主动轮35,安装在所述旋转架32上的三个连接轴36,设于所述连接轴36上的从动轮37,用于连接所述从动轮37与主动轮35的传动带,以及设置在所述连接轴36上的驱动轮38;其中一个连接轴36上对称安装有两个驱动轮38,剩余两个连接轴36上只设有一个驱动轮38;三个连接轴36的轴线相互平行且位于同一平面;操作人员先将包裹放置在环形运输带上,然后环形运输带上的激光检测装置对包裹的信息进行扫描,然后将扫描结果反馈到主控制系统上,然后主控制系统根据包裹上的信息,进而将其分配至既定的位置,进而能够将包裹运输至位移组件3上的既定位置;当包裹位于位移组件3上的既定位置后,此时驱动电机31开始工作,进而运动的驱动电机31能够带动旋转架32开始运动,进而运动的旋转架32能够调节驱动轮38的轴线方向,然后能够改变与驱动轮38抵接的包裹的位置;当完成对包裹位置的调节工作后,此时调节电机34开始工作,进而运动的调节电机34带动主动轮35开始转动,然后运动的主动轮35能够带动传动带开始运动,然后运动的传动带能够带动从动轮37开始运动,然后运动的从动轮37能够带动与之连接的连接轴36开始转动,进而能够带动套接在所述连接轴36上的驱动轮38开始运动,进而能够使包裹位于运输件41上的既定运输位置;通过设置的位移组件3,进而能够根据包裹的信息,进而能够使其中一个位移部运动,进而调节包裹的运输方向,进而使其位于相应运输件41上的运输区域,进而完成对包裹的运输工作,然后在驱动轮38的运动下,能够将包裹输送至运输件41上,进而完成对包裹的运输工作。
31.所述下料组件5包括与下料管道44连接的连接板51,贯穿于所述连接板51的运输管道56,均匀设置在所述连接板51上的至少三个转动电机52,与所述转动电机52输出端连接的第一连接臂53,与所述第一连接臂53铰接的第二连接臂54,以及用于连接所述第二连接臂54的连接块55;所述连接块55上还设有限位阀57;所述限位阀57包括固定安装在所述连接块55上的支撑板571,设于所述支撑板571上的限位气缸572,与所述限位气缸572输出端连接的限位板573,以及对称安装在所述限位板573两侧的一组限位管574;在非工作状态,所述限位管574的轴线与运输管道56的轴线相重合;当包裹经过下料部43,经由下料管道44落入至下料组件5中时,由于下料管道44的出料口与运输管道56的进料口抵接,进而包
裹会落入至连接块55上,然后根据包裹的信息,进而调节各个转动电机52的转动幅度,进而能够带动第一连接臂53开始运动,进而运动的第一连接臂53能够带动第二连接臂54开始运动,进而能够调节连接块55上的包裹的位置;当包裹位于其中一个运输设备6的正上方后,此时限位气缸572开始工作,进而运动的限位气缸572带动限位板573开始工作,进而包裹能够落入至既定的运输设备6上,进而运动设备能够将包裹运送至既定位置,然后重复上述s1
‑ꢀ
s7,进而完成对包裹的分拣工作;通过设置的第一连接臂53与第二连接臂54,进而能够调节连接块55上的包裹的放置区域,从而能够根据包裹的运输信息,进而能够将其放置其中一个运输设备6上,进而保证其能够运输至既定位置,保证包裹运输工作的顺利进行。
32.工作原理说明:操作人员先将包裹放置在环形运输带上,然后环形运输带上的激光检测装置对包裹的信息进行扫描,然后将扫描结果反馈到主控制系统上,然后主控制系统根据包裹上的信息,进而将其分配至既定的位置,进而能够将包裹运输至位移组件3上的既定位置;当包裹位于位移组件3上的既定位置后,此时驱动电机31开始工作,进而运动的驱动电机31能够带动旋转架32开始运动,进而运动的旋转架32能够调节驱动轮38的轴线方向,然后能够改变与驱动轮38抵接的包裹的位置;当完成对包裹位置的调节工作后,此时调节电机34开始工作,进而运动的调节电机34带动主动轮35开始转动,然后运动的主动轮35能够带动传动带开始运动,然后运动的传动带能够带动从动轮37开始运动,然后运动的从动轮37能够带动与之连接的连接轴36开始转动,进而能够带动套接在所述连接轴36上的驱动轮38开始运动,进而能够使包裹位于运输件41上的既定运输位置;当包裹位于运输件41上后,此时运输件41上的视觉检测设备开始工作;当视觉检测设备的检测结果与激光检测设备的检测结果一致时,此时包裹位于正确的运输位置,进而能够保证包裹能够被运送至收件人手中;当视觉检测设备的检测结果与激光检测设备的检测结果不一致时,此时包裹位于不正确的运输位置,此时纠错电机422开始工作,进而运动的纠错电机422带动与之连接的第一转动轮423开始运动,然后运动的第一转动轮423带动传动皮带424开始转动,然后运动的传动皮带424带动第二转动轮425开始工作,然后运动的第二转动轮425能够带动传动丝杆426开始运动,进而能够带动传动块427在传动丝杆426长度方向上开始运动,进而能够调节运输件41的位置,进而完成对运输件41上包裹的所在区域进行调节,然后根据视觉检测设备的检测结果,进而能够使其位于运输件41上的正确区域,进而能够使其从正确的下料部43处运出,进而完成对包裹运输区域的调节工作;当包裹位于运输件41上的正确区域时,此时磁吸件433开始工作,进而运动的磁吸件433能够对第二限位板435起到吸附的功能,然后伸缩气缸431开始工作,然后运动的伸缩气缸431能够带动升降块432开始工作,进而运动的升降块432能够提升第二限位板435的高度,进而使其远离第一限位板434,此时包裹可从两限位板573之间通过;当包裹位于运输件41上的不正确区域时,磁吸件433不工作,第二限位板435与第一限位板434抵接,进而能够起到对包裹的限位工作,进而避免包裹运输至错误区域;当包裹经过下料部43,经由下料管道44落入至下料组件5中时,由于下料管道44的出料口与运输管道56的进料口抵接,进而包裹会落入至连接块55上,然后根据包裹的信息,进而调节各个转动电机52的转动幅度,进而能够带动第一连接臂53开始运动,进而运动的第一连接臂53能够带动第二连接臂54开始运动,进而能够调节连接块55上的包裹的位置;当包裹位于其中一个运输设备6的正上方后,此时限位气缸572开始工作,进而运动的限位气缸572带动限位板573开始工作,进而包裹能够落入至既定的运输设备6上,进而运动
设备能够将包裹运送至既定位置,然后重复上述s1
‑ꢀ
s7,进而完成对包裹的分拣工作。
33.以上结合附图详细描述了本发明的优选实施方式,但是,本发明并不限于上述实施方式中的具体细节,在本发明的技术构思范围内,可以对本发明的技术方案进行多种等同变换,这些等同变换均属于本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。