1.本发明属于工程安全监测领域,具体涉及一种堤坝结构险情隐患巡检数据采集及处理系统。
背景技术:
2.堤坝巡检可以及时发现并排除安全隐患,对于堤坝工程的安全维系来说非常重要。对于堤坝隐患检测,目前常采用物探检测的方法,研究堤防物理方面的特征变化,判断堤防隐患埋深、规模和形态。随着技术发展,探地雷达、电阻率法等方法均被用于堤坝隐患探测中,通过检测数据二维剖面的局部异常区域,推断出堤坝内部隐患点的所在位置。但是堤坝里程长,隐患分布范围广、隐患类型复杂多变。为提高堤坝的防洪能力,亟需在堤坝日常和汛期巡检中提高各类隐患的准确定位判别、特别是汛期,堤坝隐患的探测和识别效率,为应急抢险争分夺秒。
3.堤坝结构复杂,隐患类型复杂多变,仅依靠单一方法很难精准地判别出隐患,单靠某一时刻的检测结果很难完全确定隐患异常体的分布。堤坝里程长,且地形复杂,采用人为的巡检和固定段落的探测,效率低,不能多种方法同时快速地对全段堤坝进行连续性的巡检。特别是汛期堤坝的隐患是动态发展的,一次检测不能全面地检测出险情隐患,需开展多次的探测确认。特别是汛期持续的高水位下,随时都面临溃堤的安全风险,传统人工巡检的方式有效性低,费时费力。因此,需要借助驾驶平台进行多种探测方法的快速连续探测。
4.多种方法的连续综合探测,实时传输的数据量巨大,不同方法的数据信息各异,需要不同的软件进行解译。如何选取所需数据、利用车载平台稳定获取所需数据信息,并处理以获取所需的隐患数据,则是当前堤坝隐患检测需要解决的问题。
技术实现要素:
5.本发明的目的在于克服上述现有技术存在的问题,提供一种堤坝结构险情隐患巡检数据采集及处理系统。
6.为实现上述技术目的,本发明采用如下技术方案:
7.一种堤坝结构险情隐患巡检数据采集及处理系统,包括堤坝巡检车载平台,所述车载平台可沿堤坝移动,所述车载平台上设有探测设备和数据处理装置;
8.其中,所述探测设备包括激光扫描仪、地质雷达设备、大地磁电阻探测设备和瞬变电磁探测设备;
9.所述激光扫描仪扫描堤坝各个坡面,进行堤坝全地形的三维测量;
10.所述地质雷达设备、瞬变电磁探测设备和大地磁电阻探测设备分别采集堤坝的浅层电阻率数据、深层电阻率数据以及整个堤坝结构的电阻率数据;
11.所述数据处理装置对探测设备采集的数据进行处理,输出隐患分析结果,包括:
12.以激光扫描得到的三维测量数据建立大坝模型;
13.以所述大坝模型为基底,分别导入所述浅层电磁波幅值数据、深层电阻率数据和
整个堤坝电阻率数据,重建得到的大坝浅层电磁波幅值分布模型图、大坝深层电阻率分布模型图和整个堤坝的电阻率分布模型图;
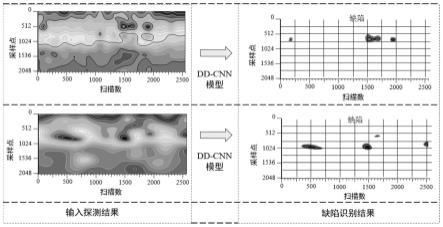
14.分别以所述大坝浅层电磁波幅值分布模型图、大坝深层电阻率分布模型图、整个堤坝电阻率数据分布模型图为输入,利用训练好的dd-cnn模型对图像进行隐患判别,然后利用图像处理先将大坝浅层电磁波幅值隐患识别结果图、大坝深层电阻率隐患识别结果图取并集得到第一输出,再将第一输出与大坝电阻率隐患识别结果图取交集,得到最终隐患位置分布图。
15.作为一种优选的实施方式,所述激光扫描仪固定于车载平台顶部;
16.所述瞬变电磁探测设备为拖曳式,通过伸缩杆固定于车载平台上,工作时与堤坝接触进行数据采集;
17.所述大地磁电阻探测设备和地质雷达设备固定于车载平台尾部。
18.作为一种优选的实施方式,所述地质雷达设备采用多通道工作时序,多通道不同中心频率天线并排同时采集数据。
19.作为一种优选的实施方式,所述地质雷达设备的天线为vivaldi天线;
20.所述vivaldi天线的两根槽线对称,且每根槽线由两段折线与其间连接内凹的曲线组成,靠近馈电结构处的第一段折线与对称轴夹角为锐角,第二段折线平行于对称轴。地质雷达优选采用多通道工作时序,为了避免各通道雷达天线间的辐射相互干扰,本技术设计了双折线型锥形槽vivaldi天线,抑制侧表面波的辐射,降低干扰,使天线能量辐射更集中增加探测深度,在工作频带内具有稳定的增益表现,波束特性优异,波束宽度为180
°
。
21.作为一种优选的实施方式,所述vivaldi天线使用环氧绝缘板封装,并使用环氧树脂粘结缝隙。由于汛期多雨的天气和地形的复杂,防止雨水进入天线内部和天线碰撞损坏,天线外部封装器件采用致密的环氧绝缘板,取消螺栓的固定,采用高强环氧树脂进行缝隙结构的粘结,保证天线封装结构的稳定可靠和防水、防潮功能,实现严酷环境下的测量。多通道地质雷达主要用于堤身多个剖面隐患的探测。
22.作为一种优选的实施方式,所述瞬变电磁探测设备为拖曳式小回线瞬变电磁探测设备,采用跨环消耦的一体化瞬变电磁结构。
23.作为一种优选的实施方式,所述瞬变电磁探测设备采用碳纤维材料封装,小回线结构间隔绝结构为铊钡钙铜氧陶瓷材料。碳纤维封装材料可保证线圈坚固性、抗震性和轻便性。选用铊钡钙铜氧陶瓷材料制作隔绝结构,可削弱小回线结构之间磁场的相互干扰,和实现强弱电的隔离。并列式的瞬变电磁结构主要用于堤基多个剖面隐患的探测。
24.作为一种优选的实施方式,所述大地磁电阻探测设备实现主被动两种模式的电阻率探测,即被动测量大地电磁场或通过配置大功率发送机发射特定的信号源,实现主动测定电磁场;当车载平台连续探测过程中,采用主动的方式用于整个堤坝结构电阻率数据的连续采集;当局部区域精细化探测时,可采用被动的方式用于整个堤坝结构电阻率数据的连续采集。
25.作为一种优选的实施方式,dd-cnn模型的训练方式为:
26.建立模型训练数据库,包括工程实测数据对和实验室模拟数据对,数据对指隐患实际分布数据和对应的电阻率、电磁波幅值分布数据形成的一组数据;
27.将模型训练数据库中的数据分为训练集和验证集数据,在隐患实际分布数据中对
隐患部位添加标签,利用训练集数据输入dd-cnn模型进行模型训练,利用验证集数据对模型训练结果进行精度评估,将得到的精度最优的模型用于车载平台采集数据的数据处理。由于工程实测数据量有限,可利用实验室模拟数据对增加数据量,提高模型训练精度。
28.作为一种优选的实施方式,所述dd-cnn模型由输入层、2个卷积层、8个fire模块、3个最大池化层、1个平均池化层和输出层组成;
29.所述2个卷积层之间为8个堆积的fire模块及其间穿插的3个最大池化层;
30.所述平均池化层连接第2个卷积层及输出层。
31.作为一种优选的实施方式,所述2个卷积层、8个fire模块使用的激活函数为relu;所述输出层为softmax函数;图像训练的损失函数为mse。
32.作为一种优选的实施方式,模型处理的过程为:
33.将电阻率、电磁波幅值分布数据图像预处理成预设像素的图像,接着分批送入模型中进行前向计算,先进入第一个卷积层,提取64通道特征后,采用第一个最大池化层进行重采样,图像缩小一半尺寸;之后通过3个堆叠的fire模块提取256通道特征后,采用第二个最大池化层进行重采样,图像大小再次缩小一半;输出图像通过4个堆叠的fire模块提取图像512通道特征后,采用第三个最大池化层进行重采样,图像尺寸再次缩小一半;进入fire模块和第二个卷积层,通过1
×
1/1的卷积核运算,输出的图像为2通道特征;然后通过平均池化层,最后输出隐患特征图像;
34.将网络模型输出的隐患特征图像与相应数据对的真实隐患的标签比较,并利用损失函数计算出损失;对输出的隐患图像与数据库中的图像进行匹配迭代计算,使损失函数到达最小,实现对图像中的隐患识别。
35.本发明具有如下有益效果:
36.1、针对当前物探方法对堤坝病害“探不准和探不全”的难点;在设计的车载平台上搭载各种探测设备,各种方法探测优势互补,互不干扰。设计了激光雷达、探地雷达、大地磁电阻(mtr)和瞬变电磁的综合数据采集系统,并利用dd-cnn(depthwise disout convolutional neural network)模型进行数据处理,实现堤坝表面险情、浅层堤身、深部堤基,堤坝结构不同深度方向上各种险情隐患的全面探测诊断。
37.2、实现堤坝结构各种空洞、蚁穴、管涌通道等隐患的快速探测,堤坝上的探测速度不小于10公里/小时,提高了堤坝汛期的巡检效率和准确性。
38.3、通过各种探测方法的综合互补探测,可分辨隐患大小不超过堤防探测深度的1/10,探测深度不浅于10米,可识别坡面范围不大于1米
×
2米的变形;详查模式下(进行加密点探测时),可分辨隐患大小不超过堤防探测深度的1/20,探测速度不小于1处隐患点/小时,探测深度不浅于30米,提高了堤坝结构隐患的探测精度和排查效率。
39.4、通过大数据平台的信息传输和人工智能解译,实现隐患的自动分析、辨识、预警,提高了堤坝管理系统的险情报送功能。
附图说明
40.图1为堤坝巡检系统的设备组成图,其中:2-1为车载平台;2-2为拖曳式瞬变电磁探测设备;2-3为激光扫描仪;2-4为大地磁电阻探测设备;2-5为多通道地质雷达设备;2-6为数据处理终端;2-7为通信设备。
41.图2为双折线型锥形槽vivaldi天线、雷达天线阵列,其中左图为vivaldi天线结构示意图,右图为将左图天线封装后并行排布形成的雷达天线阵列。
42.图3为并列式的瞬变电磁结构示意图。
43.图4为隐患识别的深度学习dd-cnn模型网络组成图。
44.图5为dd-cnn模型中的fire模块。
45.图6为隐患智能识别流程图。
46.图7为隐患智能判别预警流程图。
47.图8为探测结果中隐患智能识别结果的示例图。
48.图9为隐患缺陷的结果示例图。
49.图10为隐患最终确定示意图。
具体实施方式
50.实施例1
51.如图1~3所示的堤坝结构险情隐患巡检数据采集及处理系统,对车载平台2-1进行改造,在车身内部放置通信设备2-7和数据处理终端2-6(计算机),在车身外部搭载各种探测设备。
52.在车载平台2-1前端的固定平台放置拖曳式瞬变电磁探测设备2-2,通过塑料质的伸缩杆前段连接固定拖曳式瞬变电磁探测设备2-2与堤坝接触进行数据采集。
53.在车载平台2-1的顶部放置激光扫描仪2-3,实现堤坝地形的激光三维测量和实时地形情况的全景显示。如图3所示,瞬变电磁探测设备为拖曳式小回线瞬变电磁探测设备,采用跨环消耦的一体化瞬变电磁结构。瞬变电磁探测设备采用碳纤维材料封装,小回线结构间隔绝结构为铊钡钙铜氧陶瓷材料。
54.在车载平台2-1的尾部通过液压伸缩平台(液压尾板)搭载大地磁电阻探测设备2-4和多通道的地质雷达设备2-5,其中地质雷达设备2-5采用多通道不同中心频率天线并排同时采集。如图2所示,地质雷达设备的天线为vivaldi天线;vivaldi天线的两根槽线对称,且每根槽线由两段折线与其间连接内凹的曲线组成,靠近馈电结构处的第一段折线与对称轴夹角为锐角,第二段折线平行于对称轴。vivaldi天线使用环氧绝缘板封装,并使用环氧树脂粘结缝隙。大地磁电阻探测设备2-4可实现主被动两种模式的电阻率探测,即能实现被动测量大地电磁场,也能通过配置大功率发送机发射特定的信号源,实现主动测定电磁场;当车载连续探测过程中,采用主动的方式用于堤坝结构电阻率数据的连续采集;当局部区域精细化探测时,可采用被动的方式用于整个堤坝结构电阻率数据的连续采集。
55.在车载平台2-1的车身系统内部,放置通信设备2-7和数据处理终端2-6,其中通信设备2-7的数据传输系统集成了不同类型的数据传输和存储,包括了激光移动三维测量中的地形定位信息、探地雷达的电磁数据、瞬变电磁的视电阻率和大地磁电阻的电阻率数据。
56.在探测过程中,通过时序控制,对各类数据定时进行存储,存储后利用通信设备2-7定向传输到数据处理终端2-6,各类数据通过相应的软件解译,解译后的雷达电磁波、瞬变电磁视电阻率和大地磁电阻电阻率图像数据各自代入人工智能模型中学习训练,输出隐患的识别结果,最后综合给定隐患的类别和大小信息。同时将解译的激光移动测量三维地形图像导入隐患可视化平台作为堤防结构模型,然后将隐患导入模型中,进行隐患的实时可
视化和定位,并将信息推送到智能管理平台发送预警信息。
57.实施例使用dd-cnn人工智能模型对图像数据进行处理,并在现有的模型基础上进行了改进,增加了卷积层数,和最后输出参数的变化,输入参数都是图像的像素特征值。
58.设计的人工智能模型dd-cnn的网络结构如图4所示,由2个常规卷积层、3个最大池化层、1个平均池化层和8个fire模块组成。
59.其中fire模型,如图5所示,每个fire模块涉及两个进一步的卷积:压缩和扩展。第一层压缩卷积包含1
×
1个滤波器,而第二层扩展卷积包含1
×
1和3
×
3两个滤波器。
60.其中卷积层和fire模块采用relu激活函数,输出层为softmax函数。
61.建立模型训练数据库,包括工程实测数据对和实验室模拟数据对,数据对指隐患实际分布数据和对应的电阻率、电磁波幅值分布数据形成的一组数据;
62.将模型训练数据库中的数据分为训练集和验证集数据,在隐患实际分布数据中对隐患部位添加标签,利用训练集数据输入dd-cnn模型进行模型训练,利用验证集数据对模型训练结果进行精度评估,将得到的精度最优的模型用于车载平台采集数据的数据处理。
63.模型训练的过程为:将模型图像预处理成像素224
×
224的图像;接着将图像数据作为输入层分批送入模型中进行前向计算,模型处理的第1层为卷积层(图4),提取图像64通道特征;然后利用最大池化层2进行重采样,减小一半的图像尺寸作为输入层进入第3层至第5层的fire模块中进行计算,图像的特征通道数增加到256;采用最大池化层6进行重采样,图像大小变为缩小一半变为27
×
27作为输入层,进入7层-10层的fire模块进行计算,提取得到图像的512通道特征;采用最大池化层11对输出图像再次重采样,图像尺寸缩小为13
×
13;进入第12层fire模块和第13层卷积层的计算,通过1
×
1/1的卷积核运算,输出的图像为2通道特征、大小为13
×
13的图像;然后通过平均池化层14,最后输出大小为13
×
13的隐患特征图像;
64.将网络模型输出的隐患特征图像与相应数据对的真实隐患的标签比较,并利用损失函数计算出损失;图像的损失函数为mse:
[0065][0066]
其中,dm
pr
为预测图像,dm
re
为实际图像,dm
pr,i
为预测图像内第i个像素值,dm
re,i
为真实图像内第i个像素值,m为图像内总的像素个数。
[0067]
对输出的隐患图像与数据库中的图像进行匹配迭代计算,使损失函数到达最小,实现对大坝浅层电磁波幅值分布模型图像、大坝深层电阻率分布模型图像和大坝电阻率分布模型图像中的隐患进行识别。
[0068]
其中隐患的识别如图6所示,输入图片样本,获得样本的标注(ground truth-gt);将样本带入模型dd-cnn计算,提取学习模型l层的特征图形fn;填充fn和样本gt的尺寸为256
×
256像素;计算fn的平均激活图f
mai
;对每个特征图fi二值化;
[0069][0070]
计算每个特征图的gt与二值化后f
bin(i)
的汉明距离hdi,共产生ts
×fn
汉明距离:
[0071]
hdi=|f
bin(i)-gt|
[0072]
计算所有汉明距离的和,并根据阈值t找到最小的汉明距离;根据入围的汉明距离
选择合适的特征图fi,输出隐患特征图,给出图片样本隐患的预测结果;
[0073]
隐患信息的决策如图7所示,将实时采集处理后的探测结果带入深度学习模型dd-cnn中计算;如果预测结果没有隐患,然后,不警示;如果预测结果图像中包含隐患,则提取隐患特征图,计算特征图的平均激活值图f
ma
,通过阈值t对f
ma
应用二值化,如下所示:
[0074][0075]
从f
ma
图中获取隐患区域,提取隐患的信息(位置,轮廓),根据隐患信息,隐患区域的大小发出不同等级的警示信息,并输出隐患图像及隐患的信息。
[0076]
实施例2
[0077]
本实施例提供了一个具体的应用案例。
[0078]
在堤坝上,车载装备行驶在堤坝上时,车顶部的激光扫描仪进行堤坝全地形的三维测量,由通信设备传输到数据处理终端,在数据处理终端中通过数据处理建立堤坝的实时三维模型。
[0079]
瞬变电磁探测设备采集得到的深层电阻率数据、大地磁电阻探测设备采集的整个堤坝电阻率数据、地质雷达设备采集的浅层电磁波幅值数据分别通过通信设备传输至数据处理终端进行解译。对于各类信号数据,通过数据处理终端进行存储、解译显示。
[0080]
如图6所示,输入预处理的结果图,通过dd-cnn模型的计算,传递并提取图像的特征。然后预测隐患的类别。
[0081]
如图8所示,解译结果中的隐患可以通过其颜色可靠地表征,缺陷为深色区域。
[0082]
如图7所示,通过dd-cnn模型成功的预测解译结果中的隐患,如果解译结果预测结果包含隐患,则在深度学习模型的特征图集中提取隐患的特征图,然后对隐患特征图采用二值化处理,获取隐患的位置和大小信息,最后输出隐患的特征图。如图9所示,缺陷隐患的结果图。
[0083]
由dd-cnn模型计算,输出得到浅层电磁波幅值数据隐患识别结果图、深层电阻率数据隐患识别结果图和整个堤坝电阻率数据隐患识别结果图,如图10所示,图中的隐患位置信息进行并集和交集的运算,确定隐患的最终位置和大小信息。
[0084]
其中实现解译结果中隐患的识别,深度学习模型dd-cnn网络结构中的详细信息参数如表1所示。
[0085]
表1
[0086]
序类型卷积核/步激活函数输出大小1号输入层长 224
×
224
×
32卷积层17
×
7/2(
×
64)relu111
×
111
×
643最大池化层23
×
3/2 55
×
55
×
644fire3 relu55
×
55
×
1285fire4 relu55
×
55
×
1286fire5 relu55
×
55
×
2567最大池化层63
×
3/2 27
×
27
×
2568fire7 relu27
×
27
×
256
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。