1.本发明涉及混凝土搅拌运输车搅动容量校准技术领域,特别涉及一种激光建模混凝土搅拌运输车搅动容量校准设备。
背景技术:
2.混凝土搅拌运输车或称搅拌车,是用来运送建筑用预拌混凝土的专用卡车,搅动容量指的是混凝土搅拌运输车至于10度倾斜位置,搅拌桶能容纳最大的未经搅拌的混凝土物料(包括水),并能搅拌出运至混凝土的量(以捣实后的体积计)。倾斜状态搅拌混凝土不会洒出,那正常行驶时混凝土更不易洒出,由于搅拌桶在车上是倾斜放置,难以通过计算得出搅拌容量,因此需要在搅拌桶内注入相当体积的物质来进行搅拌容量的校准。但现有注入搅拌桶进行搅拌容量校准的物质为混凝土,直接注入混凝土操作麻烦,因此也有用水来替代混凝土注入搅拌桶进行校准的方法。但是不论使用混凝土注入还是用水注入进行搅拌容量的校准,都需要等待缓慢的注入过程,并且校准完后还需要交搅拌桶内的混凝土或水排出,耗时长,校准效率较低。
技术实现要素:
3.本发明的目的是提供一种激光建模混凝土搅拌运输车搅动容量校准设备,采用激光扫描建模的方法来计算出搅拌车的搅动容量,耗时短,有效提高校准效率。
4.本发明的上述技术目的是通过以下技术方案得以实现的:
5.一种激光建模混凝土搅拌运输车搅动容量校准设备,包括两条水平滑轨及一个竖直滑轨,两个水平滑轨相对设置,所述竖直滑轨设置于两个水平滑轨之间的中线延长线上,每一水平滑轨上均设置有沿其长度方向滑动的竖直直线电机,每一竖直直线电机的动子均设置有竖板,每一水平滑轨上均设置有用于驱动所述竖直直线电机滑动的第一驱动电机,所述竖直滑轨上设置有沿其长度方向滑动的滑块,所述竖直滑轨上设置有用于驱动所述滑块滑动的第二驱动电机,两块竖板相对设置,所述滑块朝向两个水平滑轨的中部;
6.两块竖板及所述滑块上均设置有激光扫描器,其中一块竖板上设置有x射线发射器,另一块竖板上设置有与所述x射线发射器相配合的x射线接收器,所述滑块朝向所述水平滑轨的一侧安装有驱动马达,所述驱动马达的动力输出轴连接有远离所述滑块的转盘,所述滑块转动连接有位于所述转盘前侧的转动板,所述激光扫描器均设置于所述转动板远离所述转盘的一侧,所述转盘朝向所述转动板一侧的边缘设置有磁铁,所述竖直滑轨的转动板水平的两端均设置有铁片;
7.还包括顶部安装板,所述竖直滑轨的一端转动连接于所述顶部安装板的下端,所述竖直滑轨朝向两个水平滑轨的中部转动,所述顶部安装板的下端设置有水平滑槽,所述水平滑槽内转动连接有驱动螺纹轴,所述水平滑槽的一端设置有与所述驱动螺纹轴连接的第三驱动电机,所述水平滑槽内滑动连接有与所述驱动螺纹轴螺纹连接的推拉块,所述推拉块与所述竖直滑轨的滑轨之间转动连接有连接杆。
8.通过采用上述技术方案,混凝土搅拌运输车驶入进行搅拌容量校准时,首先第三驱动电机带动驱动螺纹轴转动,使推拉快的移动带动连接杆拉动竖直扫描模块转动至竖直,第一驱动电机驱动竖直直线电机沿水平滑轨滑动,第二驱动电机驱动滑块沿竖直滑轨,并且竖直直线电机带动竖板上下往复运动,两块竖板运动过程中始终保持相同高度,竖板上的两个激光扫描器通过发出激光检测相对搅拌桶的距离,不断累积绘制出三维模型,x射线发射器与x射线接收器配合透视搅拌桶内部的螺旋推条,根据透视图智能计算出螺旋推条的大小,并且将螺旋推条绘制在三维模型内;
9.过程中竖向滑轨的驱动马达工作使转盘带动磁铁转动,转动的磁铁交替吸引转动板后的两块铁片,使转动板带动激光扫描器来回摆动;通过竖直滑轨上的激光扫描器从下向上扫描搅拌桶的出口时,出现扫描距离突然增加,则判断为此处为搅拌桶的出口最低处,混凝土会从这个出口的最低处流出,便根据搅拌桶的三维模型以及出口的最低处计算搅拌容量,实现混凝土搅拌运输车搅动容量快速校准,校准完后,将竖直扫描模块向上转动至水平或倾斜,便可将搅拌车驶出准。
10.本发明的进一步设置为:所述滑块上安装有用于监测所述转动板转动角度的角度传感器。
11.通过采用上述技术方案,角度传感器可实时检测激光扫描器摆动时的角度,激光扫描器测得距离与角度传感器测得的角度可计算出相对搅拌桶的水平距离,能够更加精确的绘制搅拌桶的三维模型。
12.本发明的进一步设置为:每一水平滑轨均包括水平螺纹轴及水平限位轴,每一第一驱动电机的动力输出轴与对应水平螺纹轴连接,每一竖直直线电机的后侧均设置有与对应水平螺纹轴螺纹连接的螺纹套及与对应限位轴滑动连接的滑套。
13.本发明的进一步设置为:所述竖直滑轨内转动连接有沿其长度方向设置的竖直螺纹轴,所述第二驱动电机设置于竖直滑轨的一端用于驱动所述竖直螺纹轴转动,所述滑块开设有与所述竖直螺纹轴螺纹连接的螺纹孔,所述竖直滑轨内设置有沿其长度方向设置的竖直限位轴,所述滑块开设有与所述竖直限位轴滑动连接的限位孔。
14.本发明的进一步设置为:所述滑块相对的两边设置有与所述转动板转动连接的连接板,所述转动板朝向所述转盘的一侧设置有与所述连接板转动连接的转轴。
15.本发明的进一步设置为:所述滑块的两块连接板之间于所述转动板转动的两边均设置有垫板,每一垫板靠近所述转动板的一侧均设置有橡胶软垫。
16.本发明的进一步设置为:所述顶部安装板的下端设置有与所述竖直滑轨转动连接的l型连接臂,所述第二驱动电机设置于竖直滑轨靠近所述顶部安装板的一端。
17.与现有技术相比,本发明具有以下有益效果:
18.其一、本发明利用激光扫描器扫描搅拌桶,并通过计算机精准绘制搅拌桶的三维模型,并且通过激光扫描器判断搅拌桶出口的最低位置,最低位置及为混凝土可以流出的位置,便可自动计算得出混凝土搅拌运输车的搅拌容量,校准快速方便,有效提高校准效率;
19.其二、利用x射线透视搅拌桶的内部,得到具有搅拌桶内螺旋推片的透视图,与激光扫描器配合,利用智能计算将搅拌桶内的螺旋推片绘制在三维模型上,便于在计算搅拌容量时排出螺旋推片,得到的搅拌容量更加准确;
20.其三、本发明在需要校准时,可将竖直扫描模块向上转动至水平或竖直,需要进行搅拌容量校准时,才将竖直扫描模块向下转动至竖直,便于搅拌车的驶入及驶出。
附图说明
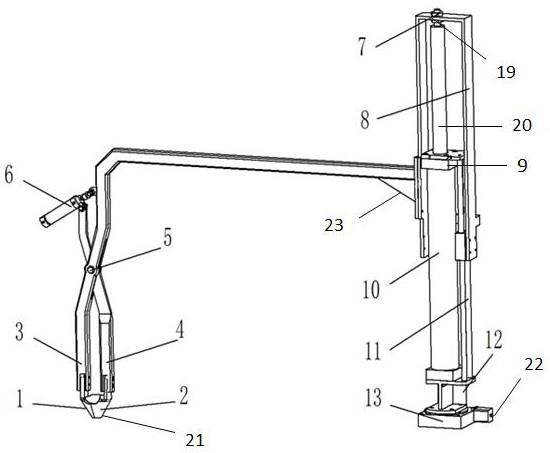
21.图1是本发明的整体结构示意图;
22.图2是主要用于展示竖板上的x射线发射器;
23.图3用于展示滑块与竖直滑轨的连接;
24.图4主要用于展示竖直扫描模块与顶部安装板的连接;
25.图5用于展示滑块与驱动马达、转动板、角度传感器及激光扫描器的连接;
26.图6主要用于展示转动板后侧的铁片。
27.图中:1、水平滑轨;11、水平螺纹轴;12、水平限位轴;13、竖直直线电机;14、螺纹套;15、滑套;16、竖板;17、第一驱动电机;2、竖直滑轨;21、竖直螺纹轴;22、竖直限位轴;23、第二驱动电机;3、滑块;31、螺纹孔;32、限位孔;33、连接板;34、垫板;35、橡胶软垫;41、激光扫描器;42、x射线发射器;43、x射线接收器;44、角度传感器;5、驱动马达;51、转盘;52、磁铁;6、转动板;61、转轴;62、铁片;7、顶部安装板;71、l型连接臂;8、水平滑槽;81、驱动螺纹轴;82、第三驱动电机;83、推拉块;9、连接杆。
具体实施方式
28.以下结合附图对本发明作进一步详细说明。
29.在本发明的描述中,需要理解的是,术语“上”、“下”、“左”、“右”、“前”、“后”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
30.此外,术语“水平”、“竖直”等术语并不表示要求部件绝对水平或悬垂,而是可以稍微倾斜。如“水平”仅仅是指其方向相对“竖直”而言更加水平,并不是表示该结构一定要完全水平,而是可以稍微倾斜。
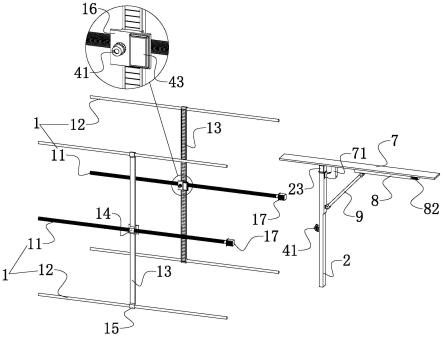
31.实施例,参照图1-6,一种激光建模混凝土搅拌运输车搅动容量校准设备,包括两条水平滑轨1及一个竖直滑轨2,两个水平滑轨1相对设置,水平滑轨1安装于校准车间内的左右两侧,竖直滑轨2设置于两个水平滑轨1之间的中线延长线上,竖直滑轨2安装于校准车间的顶部,每一水平滑轨1上均设置有一条沿其长度方向滑动的竖直直线电机13,每一竖直直线电机13的动子均设置有一块竖板16,两块竖板16相对设置,每一水平滑轨1均包括一根水平螺纹轴11,及两根位于水平螺纹轴11上下两边的水平限位轴12,每一竖直直线电机13的后侧均设置有一个与对应水平螺纹轴11螺纹连接的螺纹套14及两个与对应限位轴滑动连接的滑套15,每一水平滑轨1上均设置有用于驱动竖直直线电机13滑动的第一驱动电机17,每一第一驱动电机17的动力输出轴均与对应水平螺纹轴11连接。
32.竖直滑轨2上设置有一块沿其长度方向滑动的滑块3,滑块3朝向两个水平滑轨1的中部,竖直滑轨2内转动连接有一根沿其长度方向设置的竖直螺纹轴21,滑块3开设有一个与竖直螺纹轴21螺纹连接的螺纹孔31,竖直滑轨2内设置有两根沿其长度方向设置的竖直限位轴22,滑块3开设有两个与竖直限位轴22滑动连接的限位孔32,竖直滑轨2上设置有两
台用于驱动滑块3滑动的第二驱动电机23,第二驱动电机23设置于竖直滑轨2的一端用于驱动竖直螺纹轴21转动。
33.两块竖板16及滑块3上均设置有一个激光扫描器41,其中一块竖板16上设置有一个x射线发射器42,另一块竖板16上设置有一个与x射线发射器42相配合的x射线接收器43,用x射线透视搅拌桶内部的螺旋推条,辅助激光扫描器41建模。滑块3朝向水平滑轨1的一侧安装有一台驱动马达5,驱动马达5的动力输出轴连接有一块远离滑块3的转盘51,滑块3相对的两边均向外设置有一块连接板33,两块连接板33之间转动连接有一块位于转盘51前侧的转动板6,转动板6朝向转盘51的一侧设置有一根与连接板33转动连接的转轴61,滑块3的两块连接板33之间于转动板6转动的两边均设置有一块垫板34,每一垫板34靠近对应转动板6的一侧均设置有一块橡胶软垫35。
34.激光扫描器41设置于转动板6远离转盘51的一侧,转盘51朝向转动板6一侧的边缘设置有一个磁铁52,磁铁52呈45度的弧形,且从一端向另一端厚度逐渐变薄,竖直滑轨2的转动板6水平的两端均设置有一块铁片62,通过铁片62与磁块的配合使激光扫描器41左右摆动,滑块3上安装有一个用于监测转动板6转动角度的角度传感器44,角度传感器44安装在连接板33上,并且与转轴61连接,用角度传感器44实时监测激光扫描器41摆动的角度,配合激光扫描器41测得的距离,判断出搅拌桶相对激光扫描器41的水平距离。
35.还包括一块安装于校准车间顶部的顶部安装板7,顶部安装板7的下端设置有一条l型连接臂71,l型连接臂71的水平端与竖直滑轨2的上端转动连接,第二驱动电机23设置于竖直滑轨2靠近顶部安装板7的一端,竖直滑轨2朝向两个水平滑轨1的中部转动,顶部安装板7的下端设置有一条水平滑槽8,水平滑槽8内转动连接有一根驱动螺纹轴81,水平滑槽8的一端设置有一台与驱动螺纹轴81连接的第三驱动电机82,水平滑槽8内滑动连接有一个与驱动螺纹轴81螺纹连接的推拉块83,推拉块83与竖直滑轨2的滑轨之间转动连接有一根连接杆9,通过推拉快推动或拉动连接杆9驱动竖直滑轨2转动。
36.在混凝土搅拌运输车搅动容量校准内还设置有用于自动绘制搅拌桶模型的终端设备,两台第一驱动电机17、两条直线电机、一台第二驱动电机23、一台驱动马达5、一台第三驱动电机82及一个x射线发射器42均与终端设备电连,通过终端设备控制第一驱动电机17、直线电机、第二驱动电机23、驱动马达5、第三驱动电机82及x射线发射器42的工作,并且三个激光扫描器41都将扫描的数据传递给终端设备,x射线接收器43将搅拌桶的透视图像传递给终端设备,角度传感器44将激光扫描器41摆动时的角度传递给终端设备,通过终端设备绘制出搅拌桶的三维模型。
37.工作原理:混凝土搅拌运输车驶入进行搅拌容量校准时,首先第三驱动电机82带动驱动螺纹轴81转动,使推拉快的移动带动连接杆9拉动竖直扫描模块转动至竖直,第一驱动电机17驱动竖直直线电机13沿水平滑轨1滑动,第二驱动电机23驱动滑块3沿竖直滑轨2,并且竖直直线电机13带动竖板16上下往复运动,两块竖板16运动过程中始终保持相同高度,竖板16上的两个激光扫描器41通过发出激光检测相对搅拌桶的距离,不断累积绘制出三维模型,x射线发射器42与x射线接收器43配合透视搅拌桶内部的螺旋推条,根据透视图智能计算出螺旋推条的大小,并且将螺旋推条绘制在三维模型内;
38.过程中驱动马达5工作使转盘51带动磁铁52转动,转动的磁铁52交替吸引转动板6后的两块铁片62,使转动板6带动激光扫描器41来回摆动,并且激光扫描器41测得的距离以
及角度传感器44测得的角度,计算出搅拌桶各点距离激光扫描器41的水平距离,从而根据水平距离绘制三维模型;
39.通过竖直滑轨2上的激光扫描器41从下向上扫描搅拌桶的出口时,出现扫描距离突然增加,则判断为此处为搅拌桶的出口最低处,混凝土会从这个出口的最低处流出,便根据搅拌桶的三维模型以及出口的最低处计算搅拌容量,实现混凝土搅拌运输车搅动容量快速校准,校准完后,将竖直扫描模块向上转动至水平或倾斜,便可将搅拌车驶出。
40.本具体实施例仅仅是对本发明的解释,其并不是对本发明的限制,本领域技术人员在阅读完本说明书后可以根据需要对本实施例做出没有创造性贡献的修改,但只要在本发明的权利要求范围内都受到专利法的保护。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。